







 文章探讨了旋转雷达在导航中的运动失真和多普勒效应问题,以及2023年提出的4D雷达SLAM系统,它利用4D数据进行大范围环境建图,强调了毫米波雷达在恶劣天气下的优势。研究还展示了如何通过概率分布和循环检测技术改进姿态估计的准确性。
文章探讨了旋转雷达在导航中的运动失真和多普勒效应问题,以及2023年提出的4D雷达SLAM系统,它利用4D数据进行大范围环境建图,强调了毫米波雷达在恶劣天气下的优势。研究还展示了如何通过概率分布和循环检测技术改进姿态估计的准确性。
文章目录
2021
Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation?
code: https://github.com/keenan-burnett/yeti radar odometry
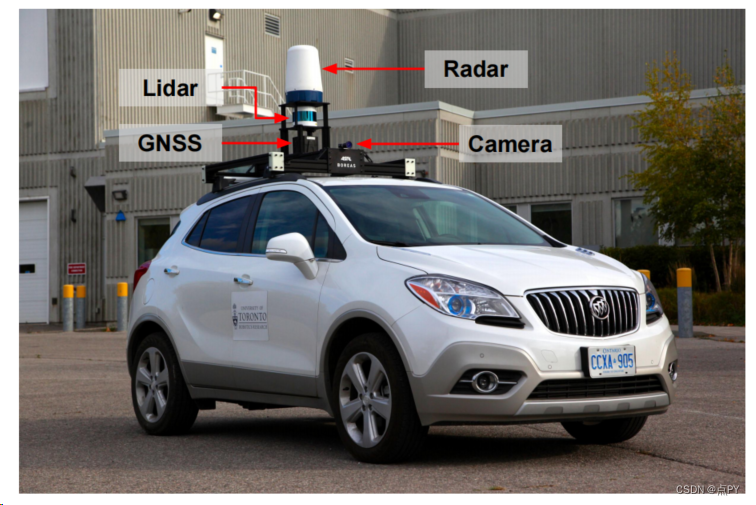
摘要: 为了应对雨雪等不利天气条件的挑战,雷达正在作为与视觉和激光雷达平行的一种传感方式被重新访问。近年来,旋转雷达在应用于测速和位置识别方面取得了巨大的进展。然而,这些工作迄今为止忽略了运动失真和多普勒效应对基于旋转雷达的导航的影响,这可能在自动驾驶汽车的高速领域具有重要意义。在这项工作中,我们使用牛津雷达机器人汽车数据集和使用我们自己的数据采集平台,演示了这些畸变对雷达测程法的影响。我们重新审视一个轻量级估计器,它可以恢复一对雷达扫描之间的运动,同时考虑这两种影响。我们的结论是,运动畸变和多普勒效应在旋转雷达导航的不同方面都很显著,前者比后者更突出。
2023
ORORA: Outlier-Robust Radar Odometry
code: https://github.com/gisbi-kim/navtech-radar-slam
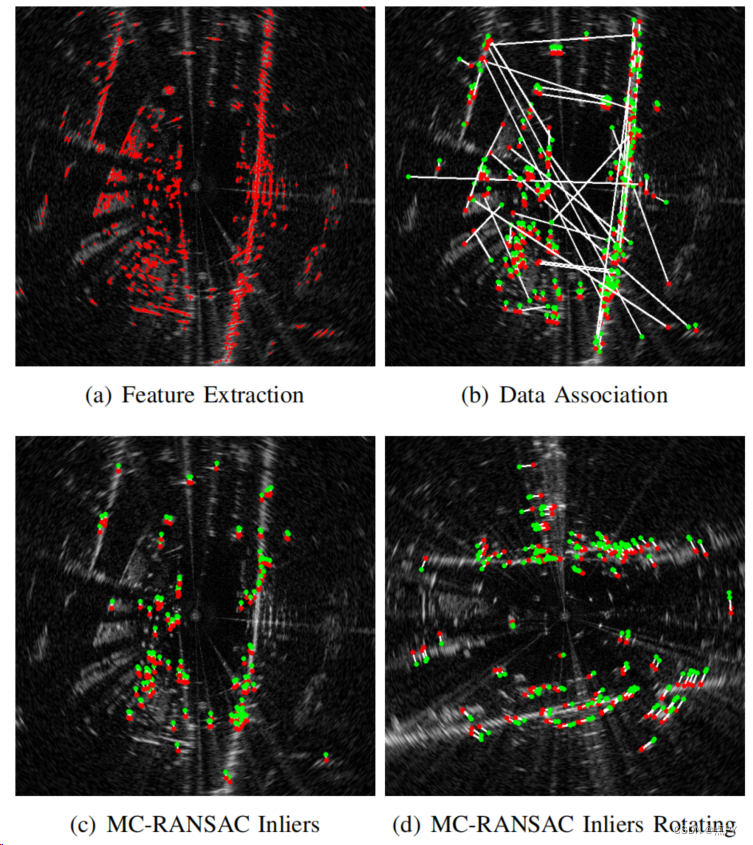
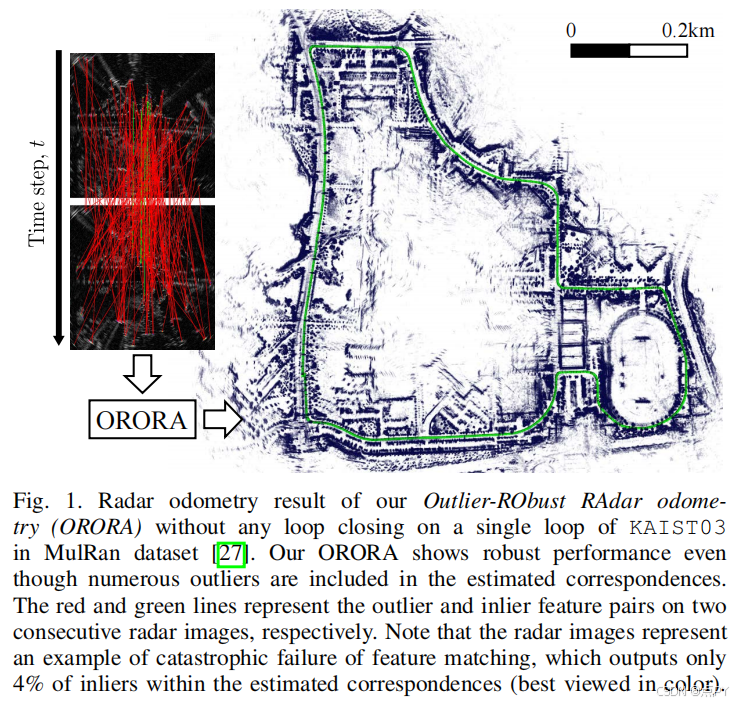
摘要:雷达传感器正在成为在极端天气条件下感知周围环境和估计自我运动的解决方案。不幸的是,雷达测量噪声大,相互干扰,降低了特征提取和匹配的性能,触发了不精确的匹配对,称为离群值。为了解决离群值对雷达测程的影响,提出了一种新的离群鲁棒方法ORORA,它是离群-反反radar测程的缩写。为此,提出了一种新的基于解耦的方法,该方法包括基于分级非凸性(GNC)的旋转估计和各向异性分量平移估计(A-COTE)。此外,我们的方法利用了雷达测量的各向异性特性,其沿方位角方向的不确定度都略大于沿径向方向的不确定度。在公共数据集中的验证表明,与其他最先进的方法相比,我们提出的方法具有鲁棒性的自我运动估计性能。
4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments based on Pose Graph Optimization
code: https://github.com/zhuge2333/4DRadarSLAM
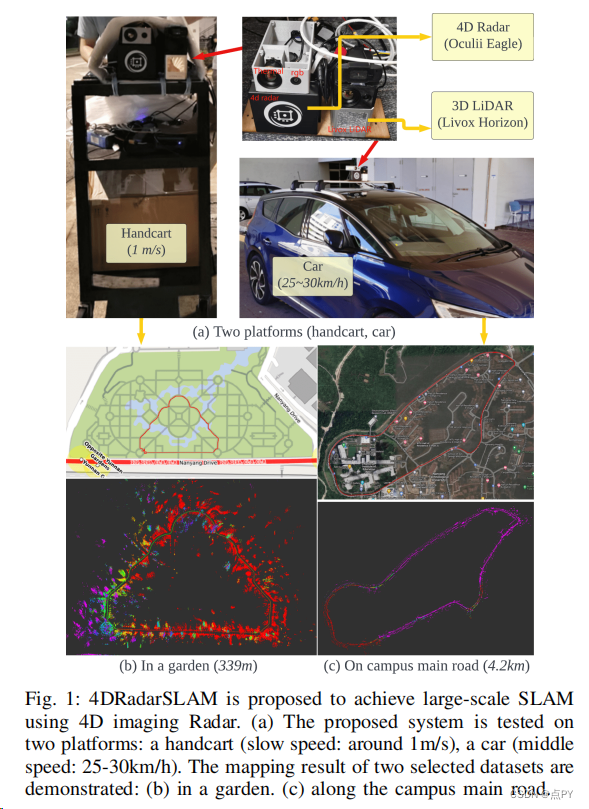
摘要:基于激光雷达的SLAM在不利天气(如雨、雪、烟雾、雾)中很容易失效,而mmWave雷达则不受影响。然而,目前的研究主要集中在2D(x、y)或3D(x、y、多普勒)雷达和3D激光雷达上,而4D雷达(x、y、z、多普勒)的工作有限。4D雷达作为具有独特特征的市场新入口,输出三维点云,而不是2D点云;与3D激光雷达相比,四维雷达具有噪声更稀疏的点云,使得提取几何特征(边缘和平面)更具挑战性。在本文中,我们提出了一个由三个模块组成的四维雷达测距系统: 1)前端模块进行扫描到扫描匹配计算测程,考虑每个点的概率分布;2)循环检测采用多个基于规则的循环预过滤步骤,然后采用强度扫描上下文步骤识别循环候选者,测程检查拒绝假循环;3)后端使用前端测程、循环闭合和可选的GPS数据构建姿态图。通过g2o获得最佳姿态。我们在两个平台和五个数据集(从240米到4.8公里)上进行了真实的实验。
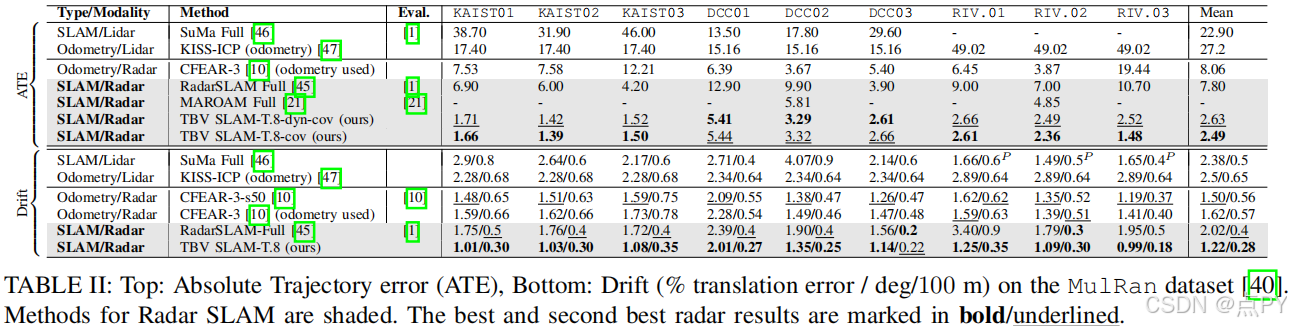
TBV Radar SLAM – trust but verify loop candidates
code: https://github.com/dan11003/tbv_slam_public
摘要:大规模环境中的鲁棒SLAM需要在从传感和测程估计到环路闭合的多个阶段实现故障弹性和感知。在这项工作中,我们提出了TBV(信任但验证)雷达SLAM,一种雷达SLAM的方法,深入验证候选环路闭合。TBV Radar SLAM通过结合多种位置识别技术的正确循环检索率:紧密耦合的位置相似性和测程不确定性搜索,从原点移位扫描创建循环描述符,并在验证后延迟循环选择,实现了较高的正确循环检索率。通过仔细验证和从多个循环约束中选择最有可能的约束,可以实现对错误约束的鲁棒性。重要的是,验证和选择是在可以很容易地计算出额外的循环证据来源时,在注册后进行的。我们将我们的循环检索和验证方法与一个强大的鲁棒测程管道集成在一个姿态图框架内。通过对公共基准测试的评估,我们发现TBV雷达SLAM的误差比之前的技术水平低了65%。我们还展示了它可以跨环境进行推广,而不需要更改任何参数。



















 2428
2428

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











