







文章目录
- 概述
- 2019
- 2020
- 2021
- 2022
- Efficient and adaptive lidar–visual–inertial odometry for agricultural unmanned ground vehicle
- Localization and Mapping on Agriculture Based on Point-Feature Extraction and Semiplanes Segmentation From 3D LiDAR Data
- Recent developments and applications of simultaneous localization and mapping in agriculture
- Field Evaluation of Path-Planning Algorithms for Autonomous Mobile Robot in Smart Farms
- LIDAR-based autonomous navigation method for an agricultural mobile robot in strawberry greenhouse: AgriEco Robot
- 2023
- 2024
- 开源数据集
概述
在农业场景下,SLAM(Simultaneous Localization and Mapping)应用通常用于农业机器人、自主车辆或者无人机等设备的导航和场地监测。这些设备需要能够在未知的或者变化的农田环境中准确定位自身位置,并且构建地图以便执行任务,例如喷洒农药、种植作物或者检测土壤质量等。以下是在农业场景下SLAM应用的简单描述:
-
定位与导航: 农业机器人或者无人机需要准确的定位信息来执行任务,例如在指定的区域喷洒农药或者施肥。SLAM技术可以帮助这些设备在没有GPS信号或者在地形复杂的环境中实现精准的定位与导航。
-
场地监测与地图构建: 农田地形和植被在不同的季节和时段可能会发生变化,因此需要实时更新的地图来指导农业作业。SLAM技术可以帮助农业设备构建准确的地图,并在需要时进行更新。这些地图可以包括土壤质量、作物分布、障碍物位置等信息。
-
智能作业规划: 基于实时构建的地图,农业机器人或者无人机可以执行智能的作业规划。例如,根据土壤质量地图调整施肥量,或者避开障碍物执行植保作业。
-
环境监测与分析: SLAM技术不仅可以用于定位和导航,还可以结合传感器数据对农田环境进行监测和分析。例如,结合RGB摄像头和多光谱传感器,可以实现对作物生长状态和病虫害情况的实时监测。
-
人工智能与决策支持: 基于SLAM技术构建的地图和传感器数据,可以应用机器学习和人工智能技术,为农场主提供决策支持。例如,根据作物生长状态和土壤质量预测未来的收成量,或者制定更有效的灌溉计划。
总的来说,在农业场景下,SLAM技术不仅可以提高农业生产效率和精度,还可以降低作业成本,并且为农业可持续发展提供技术支持。
2019
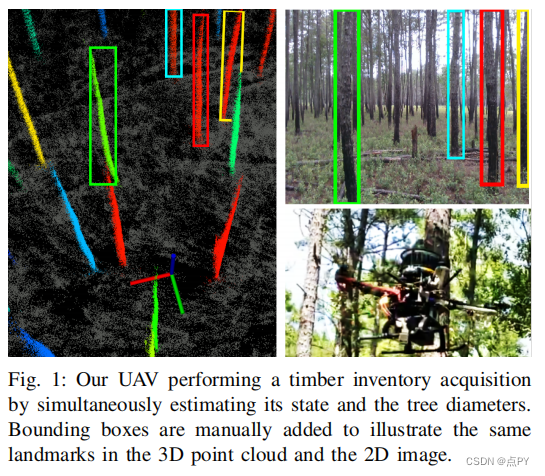
SLOAM: Semantic Lidar Odometry and Mapping for Forest Inventory
摘要: 本文介绍了一种基于语义分割和激光雷达测程和映射的端到端树直径估计管道。这种类型的环境的精确映射是具有挑战性的,因为地面和树木被树叶、荆棘和藤蔓所包围,而传感器通常会经历极端的运动。我们提出了一种基于语义特征的姿态优化方法,在估计机器人姿态的同时同时改进树模型。该管道利用一个自定义的虚拟现实工具来标记三维扫描,用于训练语义分割网络。掩蔽点云用于计算一个网格图,该网格图识别单个实例并提取SLAM模块使用的相关特征。我们表明,传统的激光雷达和基于图像的方法在无人机和手携带系统中都失败了,而我们的方法更鲁棒、可扩展,并自动生成树直径估计。
2020
基于SLA M 技术的高杆环境下小型植保车自主行驶系统研究【M】
摘要: 随着数字技术和点云处理技术不断的发展,该项技术在农业上面逐渐的应用。目前越来越多的科研机构和企业对农业小型植保车的智能化水平进行不断地研究,例如智能装备的导航、避障和识别等精准作业成为了热门的研究课题。因此,点云处理技术在智能农机装备上据有重要的位置。在点云处理技术上,需要传感器能够准确的获取农业环境,完成农业环境信息中作物的定位,这对智能化的发展具有很大的挑战。本文是基于 SLAM 技术的高秆环境下小型植保车自主行驶系统研究,为农业小型植保
车在田间行驶,识别可通行区域奠定了基础。
点云处理技术首先利用三维雷达传感器获取田间的三维作物信息,结合点云处理技术,本文提出了一种准确识别田间作物位置坐标的算法,并识别三维环境下农业小型植保车在田间的可通行区域,为农业小型植保车在田间导航提供基础。具体研究如下:
首先,本文根据需求设计了一款田间行走的农业小型植保车平台,该平台采用后置电机驱动,采用 STM32 的微型处理器进行控制,通过前轮电机进行转向控制。然后,基于三维激光雷达传感器、工控机和农业小型植保车平台搭建了田间的三维点云采集系统,利用 SLAM 技术采集田间玉米植株模型形成点云数据,再通过工控机对点云数据进行处理,过滤无关的点云数据,然后进行后续的作物定位处理,并对农业小型植保车的自主行驶进行控制。
其次,通过聚类分割算法对三维作物点云进行识别,根据三维作物本身的特征进行单株提取,并进行位置定位,然后对多株植株点云进行分割和定位识别处理。将设计的农业小型植保车平台的运动模型与点云信息进行坐标转换。最后实现农业小型植保车的行驶系统在田间对作物的识别,完成可通行区域的提取。
最后,为了验证本文方法的可行性,根据本文研究设计了一系列的试验,首先模拟布置田间玉米植株的生长环境,再进行采集数据和处理数据,最后实现玉米植株的定位和行间可通行区域的识别。并进行了可通行区域的行走试验,验证了该方法在农业导航中的可行性。
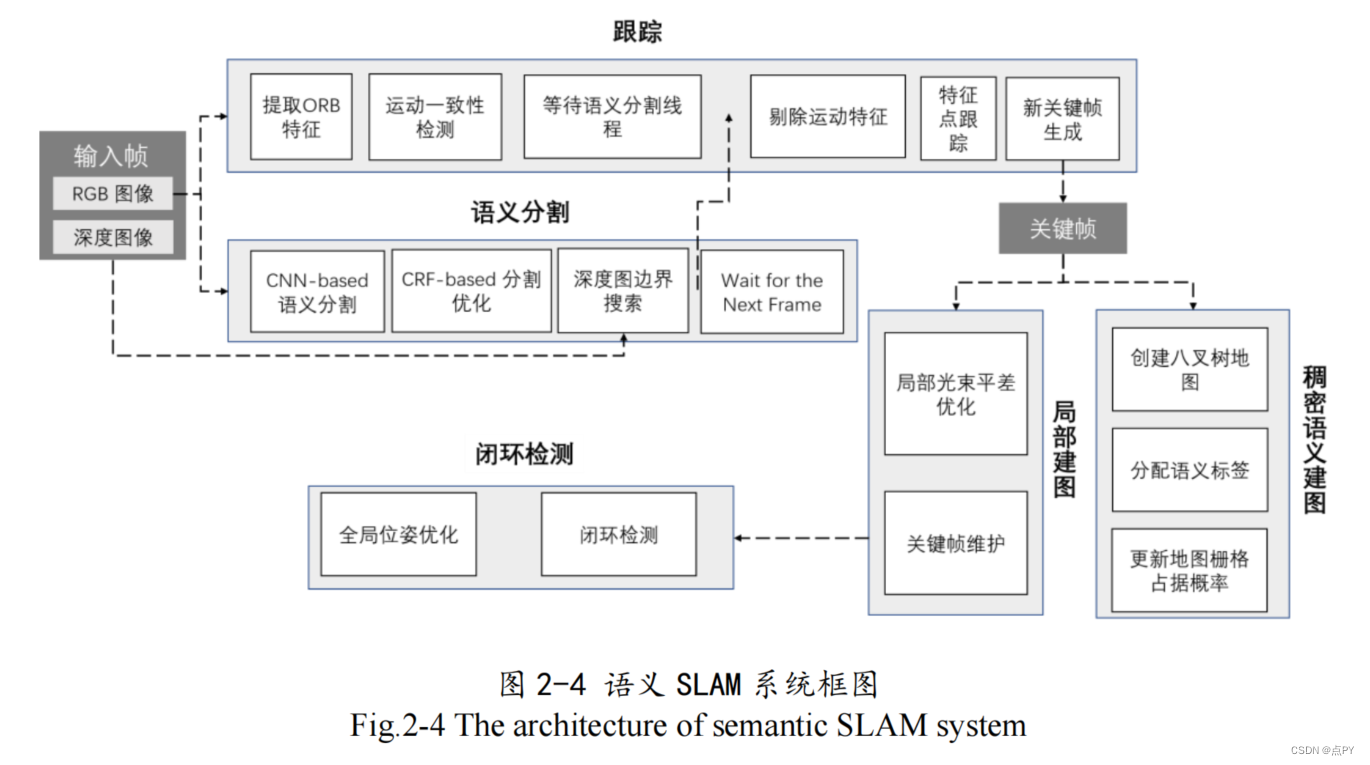
基于语义 SLAM 的农田感知系统研究[M]
摘要: 农业生产逐渐走向智能化于自动化,未来的自动收割场景下,收割机理应能够通过获得的周围环境感知数据进行高效智能的决策层任务规划,例如全局的收割路径规划,局部实时的动态路径调整及功能模块如割台、滚筒的智能控制等等,要想实现上述这些任务决策,关键的感知数据必不可少。农田三维地图作为全局的感知数据,能够为观察者判断作物长势提供长期可追踪的数字化资料,局部的作物分布信息则能够帮助收割机决策下一步运动控制。实时定位与地图构建(simultaneous localization and mapping, SLAM)算法作为构建环境三维地图的解决方案,为农田三维建图提供了技术基础。然而传统的 SLAM 技术对地图构建环节的关注度相对定位环节要少的多,纯粹的稠密点云地图往往只能用于欣赏而无法应用于数据层的智能感知。为此,一些研究者提出结合环境语义信息进行语义建图,它们通过引入语义信息对地图中的数据进行先验的识别和分类。但是,这些方法构建的地图往往存在不良噪声,其源于环境动态物体被加入地图构建过程导致的运动模糊,此外所生成的稠密地图往往点云数据量级过大很难进行地图的快速复用。
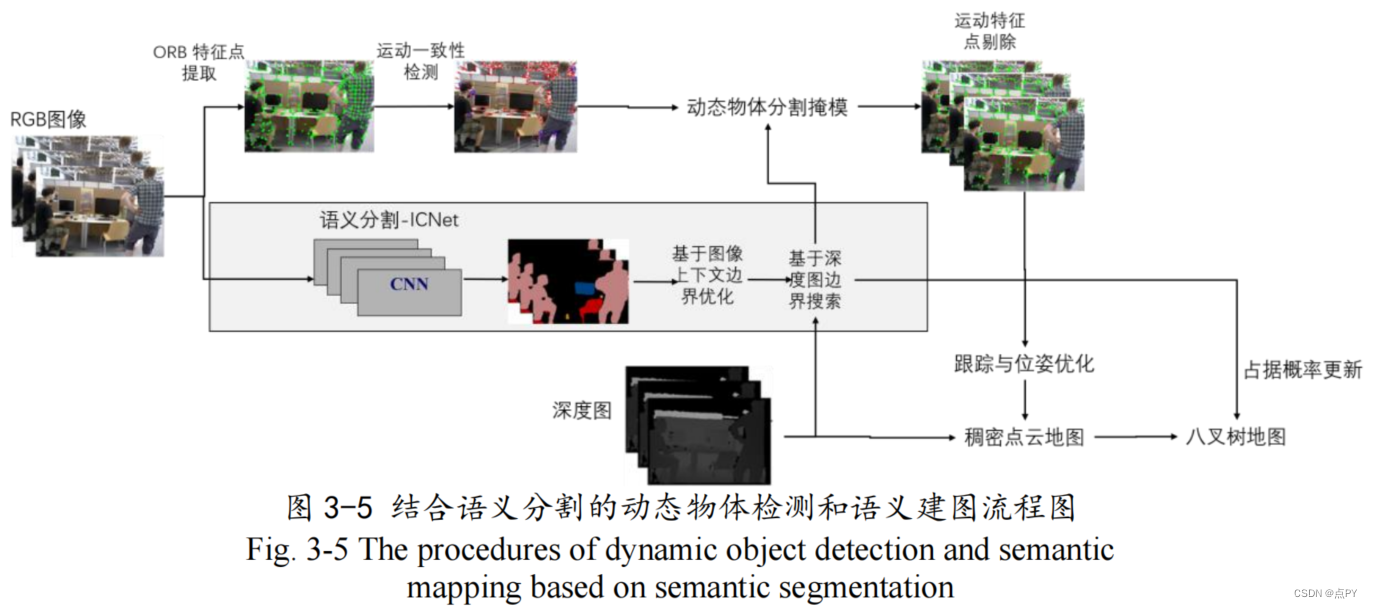
针对上述问题,本文提出一种语义 SLAM 设计思路,为了融合语义信息与传统 SLAM 算法,提出多线程架构的信息融合手段,将语义分割单独作为算法线程,与 SLAM 算法形成数据交互并避免资源独占所导致的线程阻塞。
其次,针对语义 SLAM 在定位过程中可能存在的不良噪声,本文提出基于语义分割与多视图几何相结合的不良动态物体检测方法。通过先验的动态语义对象掩模和基于光流追踪结合极线搜索的多视图动态对象掩模将特征点跟踪环节的动态对象区域点集剔除,提高位姿估计精度。
再次,针对语义 SLAM 在地图构建过程如何引入语义信息并减小地图复用难度的问题。本文提出利用占据概率更新方法对八叉树化的地图进行栅格级别的语义标签分配,分配过程通过“观测-更新”策略保留重复被观测到的地图栅格,而对偶然观测到的噪音予以剔除,同时八叉树结构的语义地图也简化了地图复用难度。
最后,针对如何获得农田中局部作物分布信息,本文提出基于多传感器的作物分布检测算法。为了验证语义 SLAM 系统及作物分布检测算法的功能,本文在公开数据集和实际农田场景进行了测试验证。基于公开数据集测试了语义 SLAM 系统解决定位环节不良噪声的功能,并同时在公开数据集和农田场景测试语义 SLAM 进行八叉树语义建图的功能;对作物分布检测算法的测试则在农田数据下进行了实测。实验结果表明本文语义 SLAM 系统能够完成在农田环境下构建三维语义地图功能并能应对存在不良动态特征的情况,作物分布检测算法则能够完成在农田中对作物高度和边界线的准确识别检测,验证了本文农田感知总体系统的可行性和准确性。
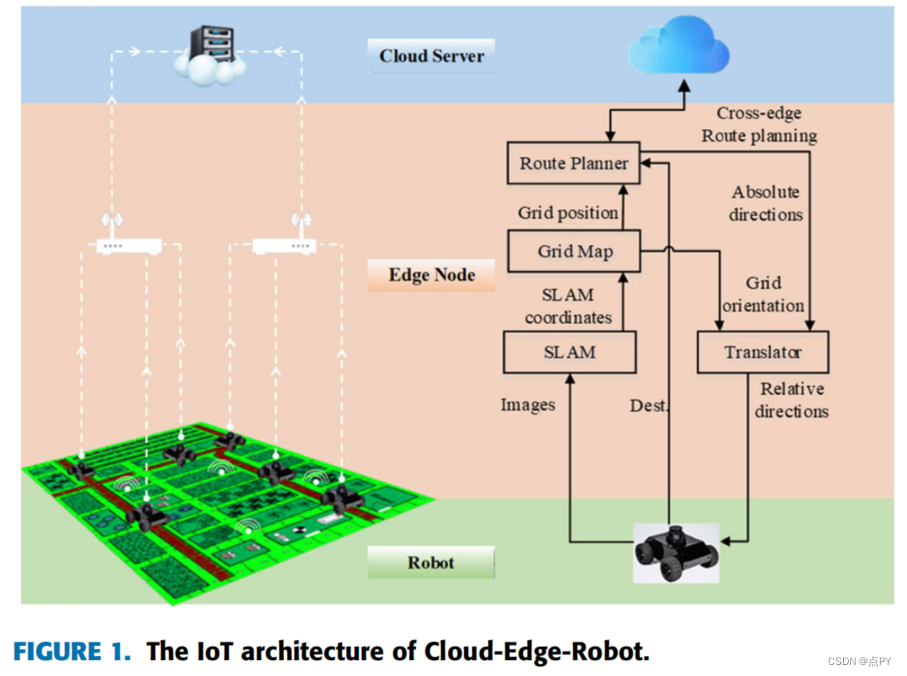
Ground-Level Mapping and Navigating for Agriculture Based on IoT and Computer Vision
摘要: 自主农业系统是一种很有前途的解决方案,可以弥补农业任务的劳动力短缺和提高农业生产力的持续需求之间的差距。自动绘图和导航系统将成为大多数自主农业系统的基石。在此基础上,我们提出了一种基于计算机视觉技术(网格同时定位和映射算法,Mesh-SLAM)和物联网(IoT)的底层映射和导航系统,在边缘和云上生成三维场地图。该系统的创新包括三层作为子系统,1)仅使用单眼摄像机进行帧采集的地面机器人车辆层,2)边缘节点层用于图像特征数据的边缘计算和通信,3)云层用于一般管理和深度计算。通过使机器人车辆直接将连续帧流到相应的边缘节点,实现了映射阶段的效率和速度。然后,每个协调一定范围机器人的边缘节点,逐帧应用新的网格-slam,其核心是通过具有可伸缩单元的网格算法重构特征映射,并通过滤波算法减小特征数据的大小。此外,云计算允许全面的安排和大量的深度计算。该系统利用计算能力动态分布到边缘,可扩展到更大规模的场和更复杂的环境。我们的评估表明: 1)该Mesh-SLAM算法在映射和定位精度、精度和预测误差(厘米分辨率)等方面都优于它;2)物联网架构的可伸缩性和灵活性使系统模块化,易于添加/删除新的功能模块或物联网传感器。我们认为,成本和性能之间的权衡广泛地增强了该系统在实际农场中的可行性和实际实施。
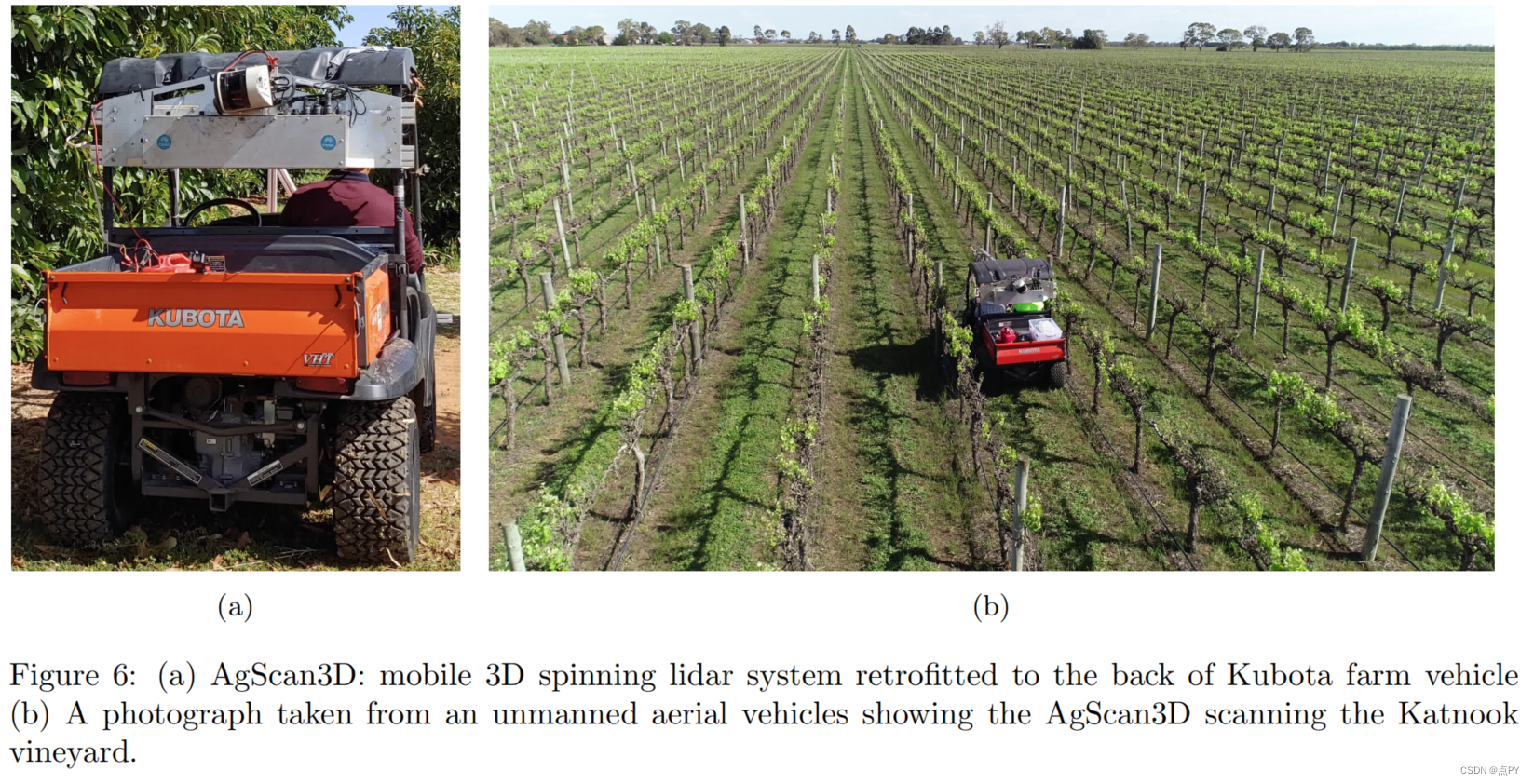
Canopy Density Estimation in Perennial Horticulture Crops Using 3D Spinning Lidar SLAM
摘要: 我们提出了一种新的,冠层密度估计的解决方案,使用三维射线云表示多年生园艺作物在田间尺度。为了在野外条件下获得较高的空间和时间保真度,我们提出将连续时间3DSLAM(同步定位和映射)应用于安装在移动农场车辆上的旋转激光雷达有效载荷(AgScan3D)。AgScan3D数据通过连续时间SLAM算法处理到一个全局注册的3D射线云。全球射线云是一种典型的数据格式(一个数字双胞胎),从中我们可以在一个季节内和跨季节内多次比较葡萄园的快照。然后,我们从射线云中自动提取葡萄园的行,并进行了一种新的密度计算来估计葡萄园的最大似然冠层密度。这种数字孪生的结合,加上冠层结构信息的准确提取,允许整个葡萄园在整个生长季节和每年进行分析和比较。在仿真实验和现场实验中都对该方法进行了评价。研究人员在四个葡萄园结构和葡萄管理不同的地点进行了田间试验,在两个生长季节和64个数据收集活动,结果总共穿越160公里,42.4公顷的葡萄藤,总共大约93000棵葡萄藤。我们的实验表明,每个葡萄园面板的冠层密度重复性为3.8%(相对RMSE),采集速度为5-6 km/h,与基于行业标准间隙分数的解决方案相比,估计密度低于标准差的一半。
2021
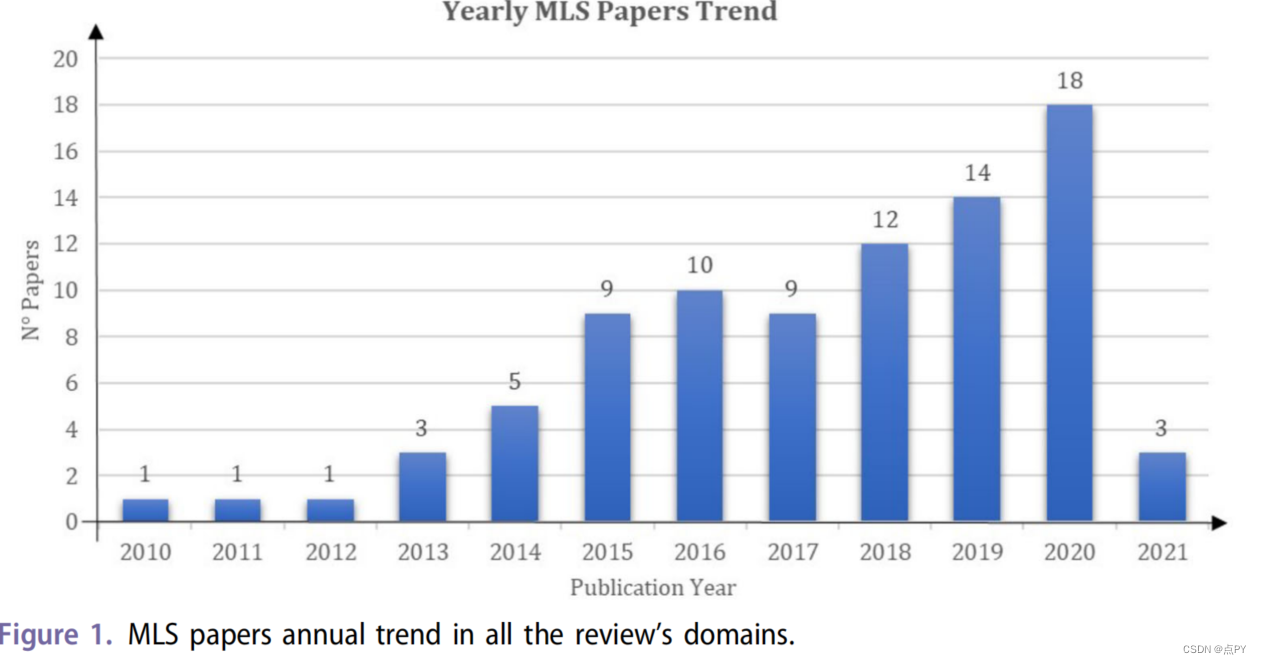
Mobile 3D scan LiDAR: a literature review
摘要: 本文通过回顾移动激光扫描系统的不同年份(2010年至2020年)的研究活动,旨在回顾现有系统以及它们在多方面领域的利用。在这种程度上,该工作定义了使用移动激光扫描的五个领域领域:建筑和城市环境、文化遗产和考古学、地下环境、环境监测、林业和农业。此外,本文还揭示了各个领域的优缺点,为那些利用创新系统参与三维数据收集的研究人员提供了有用的指导。为了达到这些目的,研究论文,主要考虑地球科学相关的期刊。他们之间的比较表明,尽管移动映射系统具有令人难以置信的潜力,但人工干预仍然是强制性的,需要后处理的行动来达到预期的结果。此外,我们的研究提供了对技术和方法上的局限性的见解,这引起了对三维测量的移动测绘系统的普遍怀疑,强调在大多数情况下需要补充数据才能使最终结果可信。这些障碍阻碍了移动激光扫描的扩散,指向了进一步研究的未探索领域,为未来的研究方向提供了有用的指导。
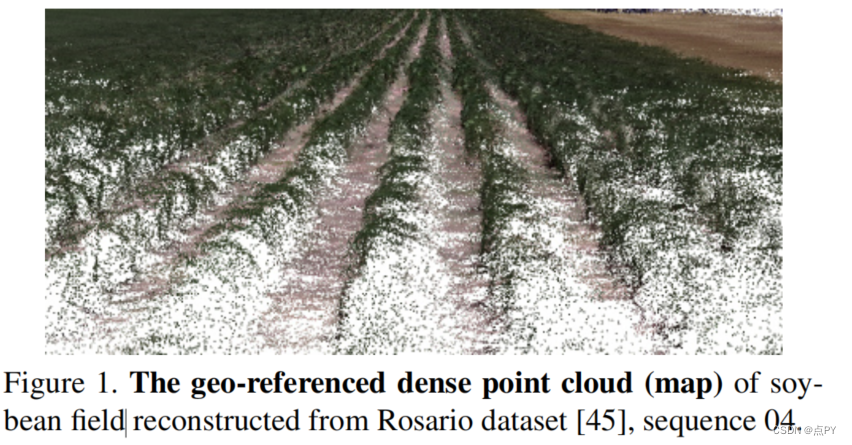
SLAM in the Field: An Evaluation of Monocular Mapping and Localization on Challenging Dynamic Agricultural Environment
摘要: 本文演示了一种能够结合稀疏、间接、单目视觉SLAM的系统,以及直线和实时多视图立体声(MVS)重建算法。这种组合克服了在农业环境中使用的自动驾驶汽车或机器人所遇到的许多障碍,如过度重复的模式,需要非常详细的重建,以及由不平坦的道路造成的突然移动。此外,单眼SLAM的使用使我们的系统更容易与现有设备集成,因为我们不依赖激光雷达(昂贵且耗电)或立体相机(其校准对外部扰动敏感,例如相机被替换)。据我们所知,本文提出了第一个评估为单眼SLAM的结果,和我们的工作进一步探索无监督深度估计在这个特定的应用程序场景通过模拟RGB-D SLAM解决规模模糊,并展示了我们的方法产生重建有助于各种农业任务。此外,我们强调,我们的实验为改善农业环境下的单眼SLAM系统提供了有意义的见解。
2022
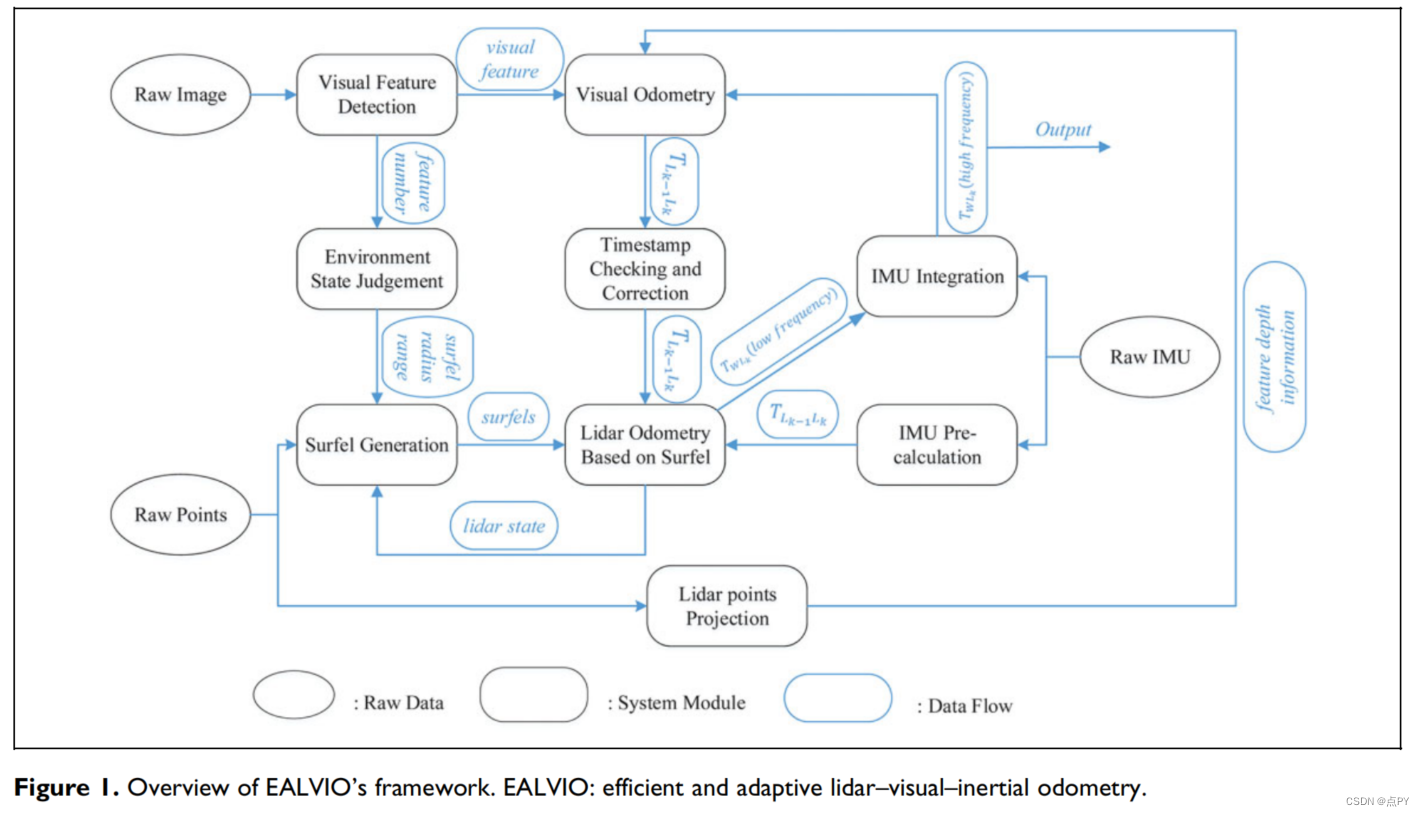
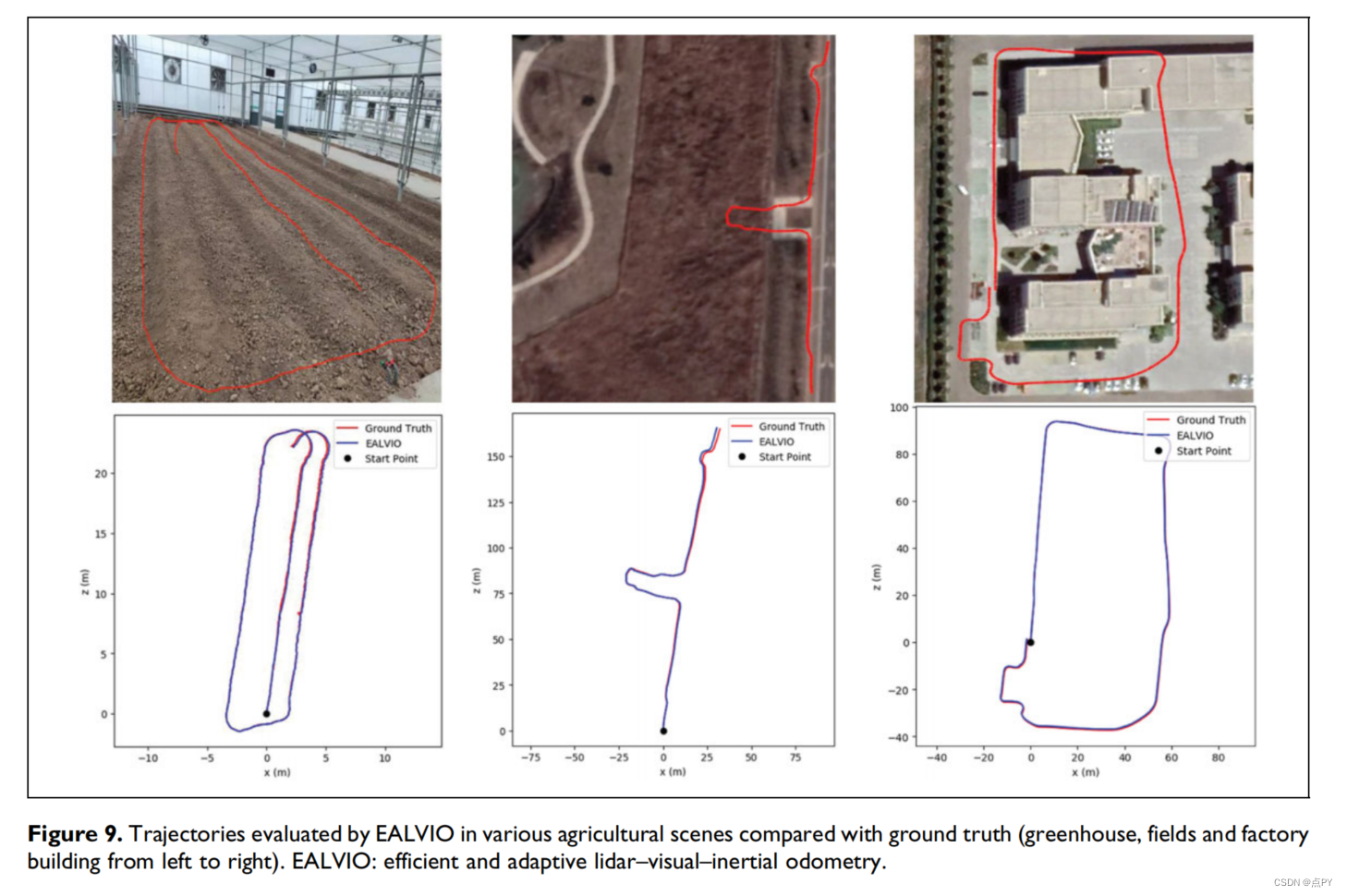
Efficient and adaptive lidar–visual–inertial odometry for agricultural unmanned ground vehicle
摘要: 农业无人地面车辆定位的精度直接影响到其导航的精度。然而,由于环境的变化和农业领域的功能较少,这些无人地面车辆在全球定位系统拒绝的区域进行精确定位是一个挑战。在本文中,我们提出了一种基于同步定位和映射的高效自适应传感器融合测程框架,在没有全球定位系统的帮助下处理农业无人地面车辆的定位问题。该框架利用了三种子测程法(激光雷达测程法、视觉测程法和惯性测程法),并根据环境情况将它们自动组合起来,以提供准确的实时姿态估计。通过权衡算法的鲁棒性和姿态估计的准确性,实现了子测程的组合。其效率和适应性主要反映在我们提出的基于曲面的迭代最近点方法上,该方法利用可变曲面半径范围和自适应迭代最近点初始化来提高不同环境下姿态估计的精度。我们在各种农业无人地面车辆的工作区域和其他一些开放数据集上测试了我们的系统,结果表明,与现有的方法相比,该方法主要在精度、效率和鲁棒性方面表现出更好的性能。
论文的主要贡献:
- 提出了一种高效的自适应传感器融合测程框架,用于农业ugv的姿态估计,并设计了一系列EALVIO模块,以提高其在不同农业环境下的鲁棒性。
- 提出了一种利用可变的冲浪半径范围和自适应初始化的基于冲浪的ICP方法来保持效率和精度。
- 一系列的实验测试系统是否能达到预期的性能效率,准确性和鲁棒性与先进的方法相比,消融研究实现分析相应的模块带来的性能改进EALVIO和各种农业环境的姿态估计。
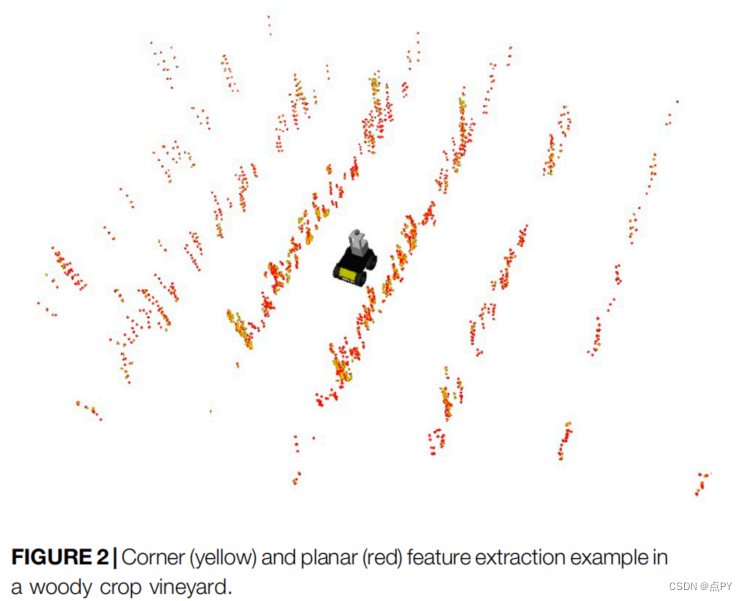
Localization and Mapping on Agriculture Based on Point-Feature Extraction and Semiplanes Segmentation From 3D LiDAR Data
摘要:开发用于农业的地面机器人是一项艰巨的任务。机器人应该能够执行诸如喷洒、收获或监控等任务。然而,农业场景中结构的缺乏挑战了定位和映射算法的实现。因此,定位技术的研究和发展对促进农业机器人技术的发展至关重要。为了解决这个问题,我们提出了一种适用于农业定位和映射的VineSLAM算法。这种方法使用从三维激光雷达数据中提取的点特征和半平面特征来绘制环境地图,并使用一种考虑这两种特征模式的新型粒子滤波器对机器人进行定位。利用模拟数据验证了该算法的数值稳定性。该方法仅适用于三个正交半平面的机器人定位。此外,将整个VineSLAM管道与最先进的方法进行了比较,考虑了在一个木质作物葡萄园进行的三个真实实验。结果表明,我们的方法可以精确定位机器人的长和对称的葡萄园走廊,优于最先进的算法。
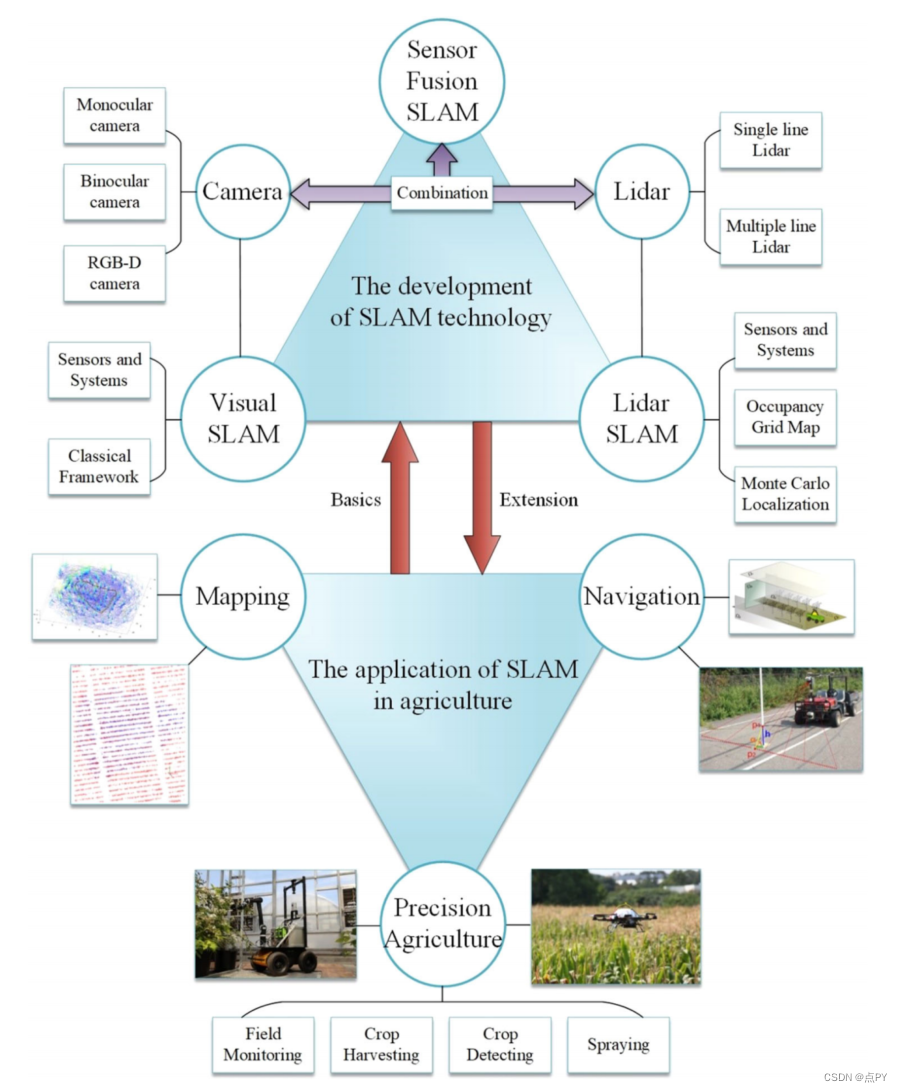
Recent developments and applications of simultaneous localization and mapping in agriculture
摘要:同步定位映射(SLAM)是在不了解环境的情况下,使用多个传感器对无人移动车辆进行定位,同时构建该环境地图供进一步应用的过程。在过去的三十年里,SLAM在移动机器人控制和无人驾驶车辆导航中得到了广泛的研究和应用。SLAM技术在自动对移动机器人进行导航和同时重建周围环境的三维(三维)信息方面具有巨大的潜力。随着传感器技术和三维重建算法的大力推动,人们已经多次尝试提出新的结合不同传感器的系统和算法来解决SLAM问题。值得注意的是,SLAM已经扩展到农业的各个方面,包括自主导航、3D测绘、现场监测和智能喷洒。本文主要介绍了SLAM的发展和应用,特别是在复杂和非结构的农业环境中。从SLAM、视觉和SLAM、传感器融合SLAM中详细总结了SLAM的发展情况,并讨论了SLAM技术在农业测绘、农业导航和精确自动农业中的应用和前景。特别关注在农业任务中应用的SLAM传感器、系统和算法。此外,还报道了SLAM面临的挑战和未来趋势。
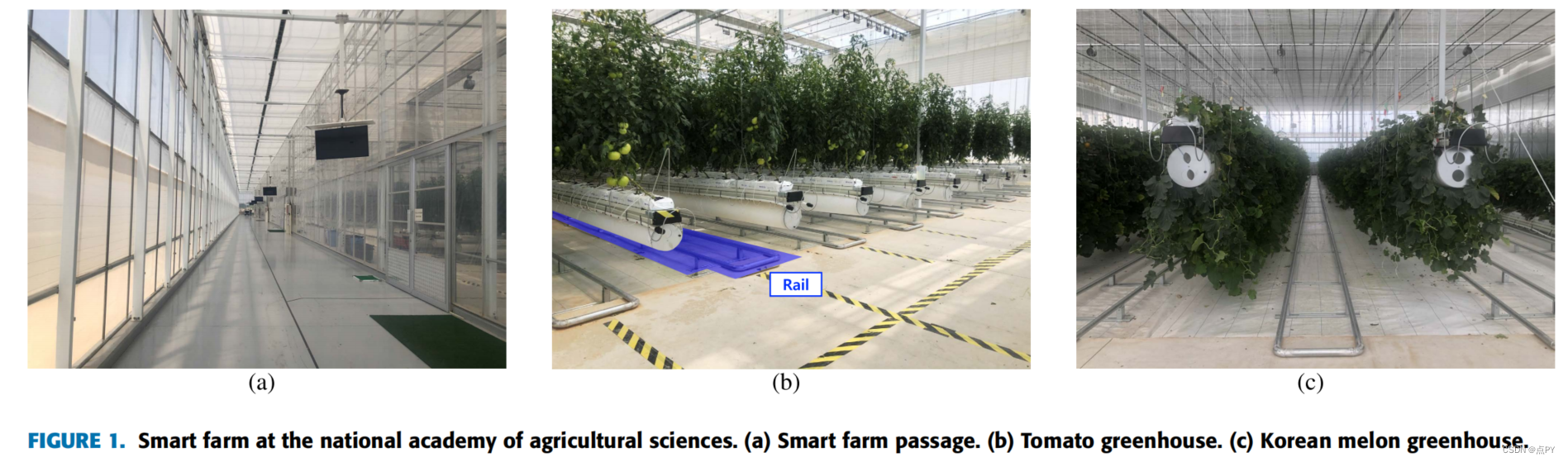
Field Evaluation of Path-Planning Algorithms for Autonomous Mobile Robot in Smart Farms
摘要: 路径规划对于一些应用至关重要,包括工业设施、网络流量、电脑游戏和农业应用。在智能农场中实现自动路径规划方法对农业技术的未来发展至关重要。路径规划分为全球规划和地方规划规划。全球规划者被分为不同的类型,并使用著名的基于网格和基于采样的算法。在本文中,我们提出了一种结合同步定位和映射(SLAM)技术的适合智能农场的算法。讨论了基于网格的Dijkstra算法、基于网格的A算法、基于采样的快速探索随机树(RRT)算法和基于采样的RRT算法的特点,并通过现场测试研究了一种适用于智能农场的算法。我们假设了农业收获机器人、喷洒机器人和农业运输机器人的路径规划,并在有静态和动态障碍的环境下进行了实验。此外,还对所设置的参数进行了实验验证。采用夏皮罗-威尔克检验来确定正态分布的形状,并采用方差分析(方差分析)和Kruskal-Wallis检验来确定实验结果的显著性。智能农场的目标是尽量减少对作物的损害;因此,准确而不是快速达到目标点是至关重要的。根据研究结果,我们确定了A*算法适用于智能农场。这一结果也为在智能农场工作时,在最短的时间内到达正确的目的地提供了可能性。
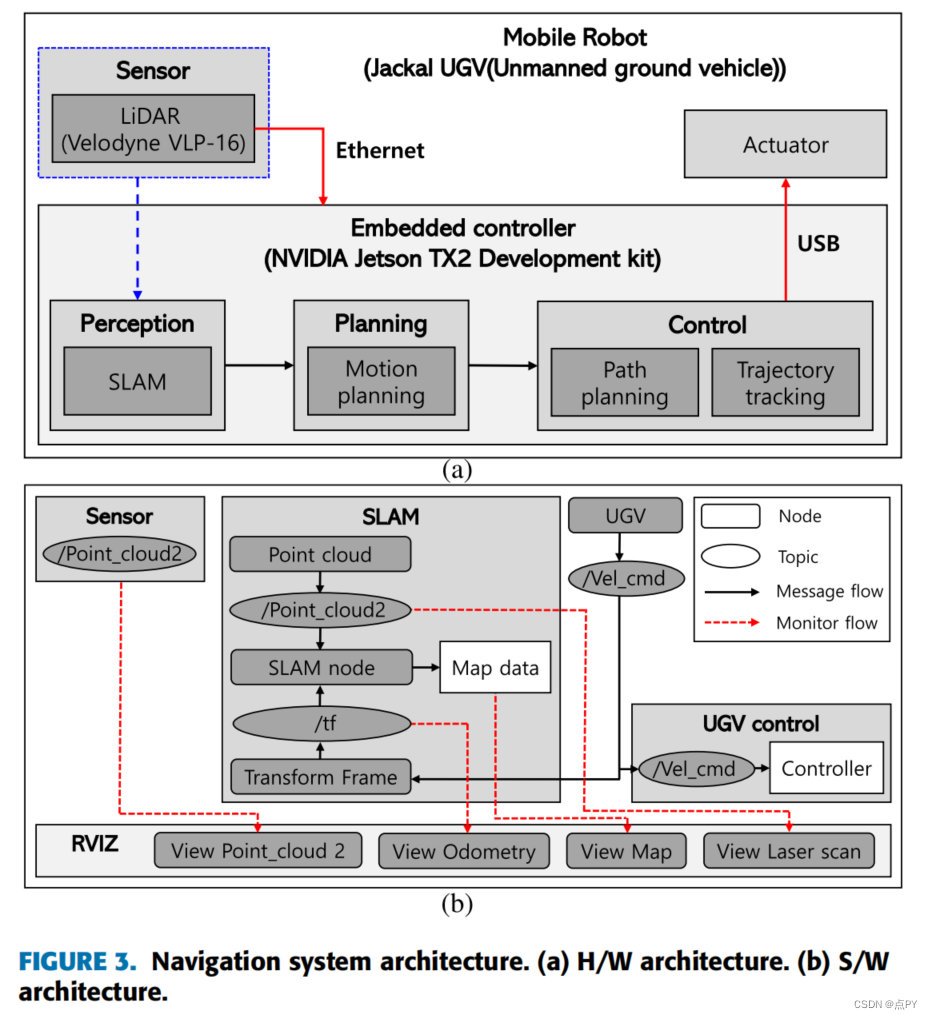
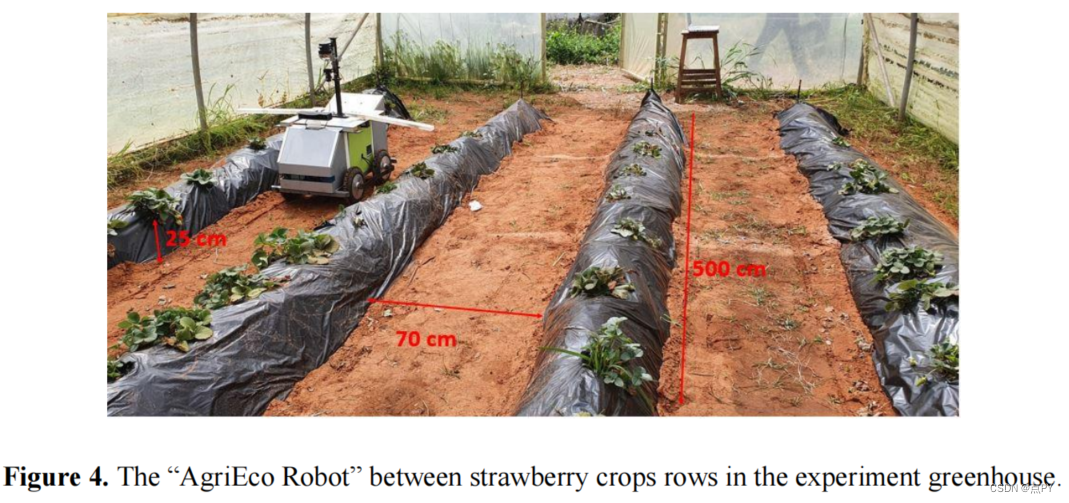
LIDAR-based autonomous navigation method for an agricultural mobile robot in strawberry greenhouse: AgriEco Robot
摘要:本文提出了一种基于四轮驱动和嵌入式感知传感器的农业移动机器人“AgriEco机器人”的自主导航方法。该方法可以在自动喷洒农药的同时准确引导草莓作物的行,并检测末端并切换到下一行。主控制系统采用基于二维激光雷达传感器的机器人操作系统(ROS)进行开发。对采集到的二维点云数据进行处理,以估计机器人相对于作物行的航向和横向偏移量。采用了一种运动控制器,保证了所开发的自主导航方法。在草莓温室的真实条件下,已经对自主导航的准确性进行了评估,证明了其在农药自动喷洒方面的有效性。
2023
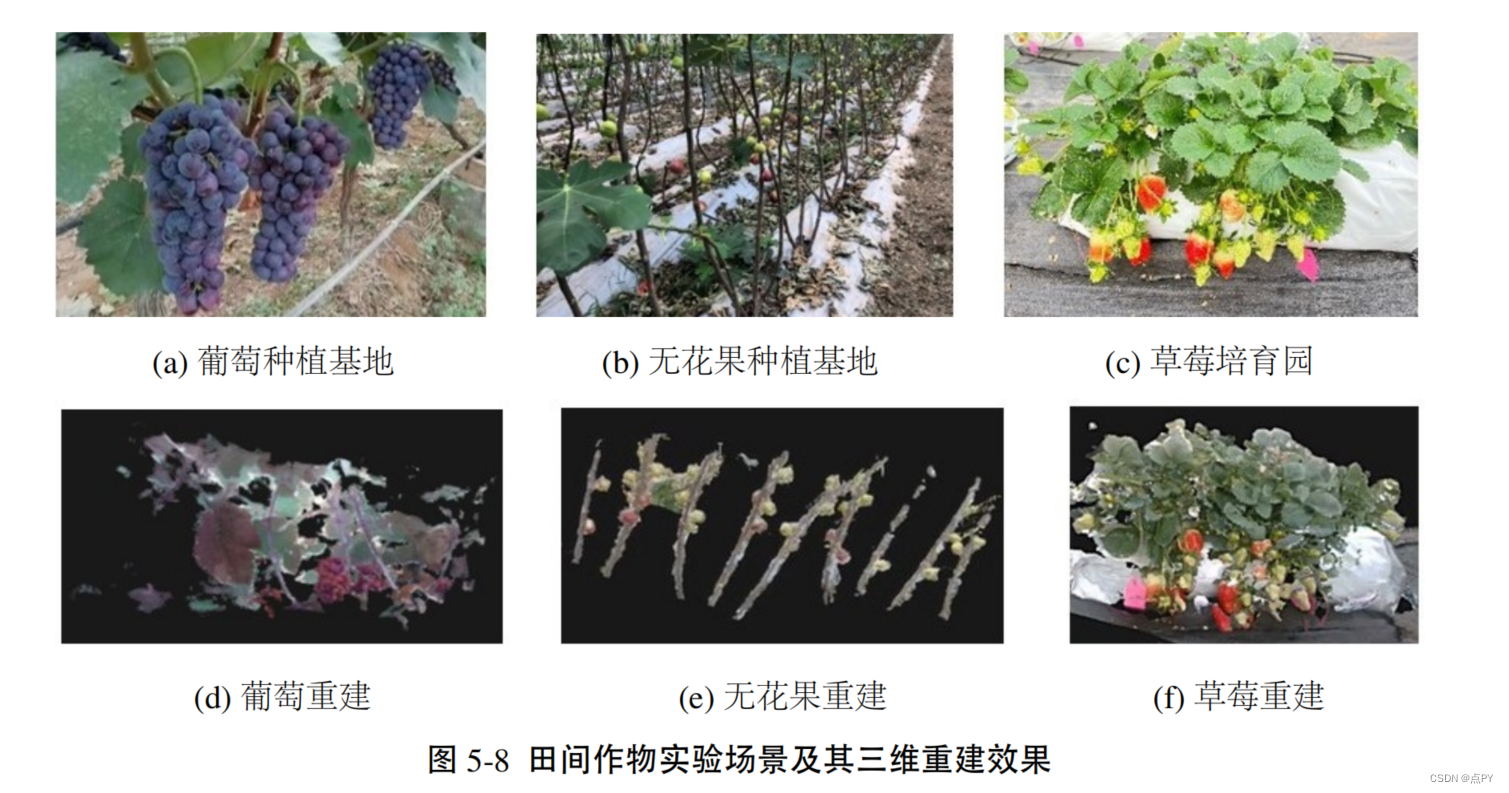
基于视觉 SLAM 的田间三维场景实时重建与路径规划方法研究[M]
摘要: 田间作物的三维重建对于研究其生物学特性、冠层光照分布以及农业机器人导航等都具有重要的作用。然而复杂的田间环境使农作物实时三维重建困难,田间弱纹理性使单一特征的即时定位与地图构建(Simultaneous Localization and Mapping,简称SLAM)系统难以获得有效特征,无法准确、实时构建田间三维地图,且构建的地图难以直接应用于后续导航避障等。针对以上问题,本文基于 RealSense D435i 深度相机构建了点线特征融合的 RGB-D SLAM 建图与路径规划系统,在提高系统定位精度的同时满足田间三维场景实时重建与导航避障需求。本文的主要研究内容如下:
(1) 基于点线特征融合的田间弱纹理位姿优化方法研究。首先,针对点特征在光照较强、果实分散、枝叶较多的田间结构化弱纹理场景中定位精度下降的问题,将线特征引入 SLAM 系统,在联合点线特征的基础上,通过 K 最邻近(K-Nearest Neighbor,简称 KNN)和随机采样一致(Random Sample Consensus,简称 RANSAC)算法优化暴力匹配算法(Brute Force Matcher,简称 BFM),得到更加准确的匹配关系。其次,通过构建点线特征误差函数,基于曼哈顿世界解耦位姿估计的理论,联合两者信息进行平
移估计,极大地提高系统在弱纹理环境下的轨迹精度。然后,针对特征联合位姿估计方法中关键帧数量大幅增加造成点云冗余的问题,提出一种关键帧选取优化策略,并对相机的位姿以及空间点、线的位置进行优化。最后,利用关键帧回环检测得到全局一致的运动轨迹。
(2) 基于视觉 SLAM 的田间地图构建与路径规划方法研究。针对稀疏地图可视化效果差、信息量较少无法满足导航、避障等功能实现的问题,构建田间场景的稠密点云地图和八叉树地图,并基于多滤波器联合优化的方法实现高质量的三维重建效果。进一步基于 SLAM 生成的八叉树地图,利用改进的 A* 算法在生成的八叉树地图上实现路径规划,在减少冗余节点、提升搜索效率的同时规划出起始点到目标点的最优路径。
(3) ROS 环境下田间三维场景实时重建与路径规划系统集成。首先,根据 ROS Topic获取 RealSense D435i 相机彩色和深度图像的发布话题,实现图像信息的实时采集、传输。其次,为提高系统实时性、降低内存负担,增加关键帧状态接口,接收相机输出位姿和关键帧两个话题重建点云。接着将点云地图转换成 ROS 下的数据类型通过 Topic发布,并利用 Octomap 节点将点云数据转换为八叉树地图。最后,利用 Octomap 的 Rviz组件发布起始点、目标点信息以及它们之间的路径计算结果,并基于 ROS Rviz 工具构
建可视化界面,添加彩色、深度图像以及地图等发布话题,实现实时运动轨迹跟踪、实时地图构建以及最优的路径规划结果显示。
在 TUM RGB-D 数据集上进行轨迹精度和建图质量的定量对比以及真实田间场景的定性分析结果表明,与目前先进的特征方法相比,本文方法在多个序列上 ATE 和RPE 误差指标平均下降 30% 和 19% 左右,能够有效提高系统精度,且重建的三维地图更加符合真实场景。在仿真地图上和田间真实场景的路径规划结果表明,本文改进的A* 算法能够减少冗余节点,有效提升搜索效率,在真实环境下成功完成路径规划。本文在不使用 GPU 加速的条件下实现了一个低成本、高鲁棒的田间地图实时构建与路径规划系统,对实现农业机器人导航避障等具有重要的理论价值和实践意义。
LiDAR-based object detection for agricultural robots
摘要: 光探测和测距(激光雷达)传感器已被证明是收集环境空间信息的一个有价值的工具,也是自主系统感知的一个重要组成部分。在农业领域,最先进的检测、分类和跟踪算法经常利用激光雷达和照相机的结合,通过融合语义和空间信息。这在一定程度上是由于有了专门优化的快速算法,以利用方便的RGB图像的2D数据结构。尽管如此,在农业中依赖照相机仍有局限性,因为它们高度依赖良好的照明条件,通常缺乏明确的几何信息,而激光雷达在这方面和范围方面尤其有利。这使得激光雷达对于自定位、映射或目标检测等感知应用特别有价值。然而,三维激光雷达点云的非结构化性质,加上它们可能的大尺寸和密度,在这类任务的实时能力方面提出了一个重大障碍。因此,在三维激光雷达传感器数据上的目标检测具有挑战性,在农业上的解决方案通常涉及非常狭窄的用例或严格的向下采样,以确保实时适用性。在这里,我们提出了一种具有2.5D映射表示的算法,以避免计算缺陷,并确保实时能力。我们利用已建立的算法将三维激光雷达数据投影到两个不同的地图中,然后在每个地图上分别应用目标检测算法,然后将信息合并为一个联合估计。从在2.5D地图中存储的信息中,计算出每个对象的轴对齐边界框,其中包含有关位置和尺寸的信息。我们提出了一个概念证明,并评估了一个特定领域的用例的实时能力。

2024
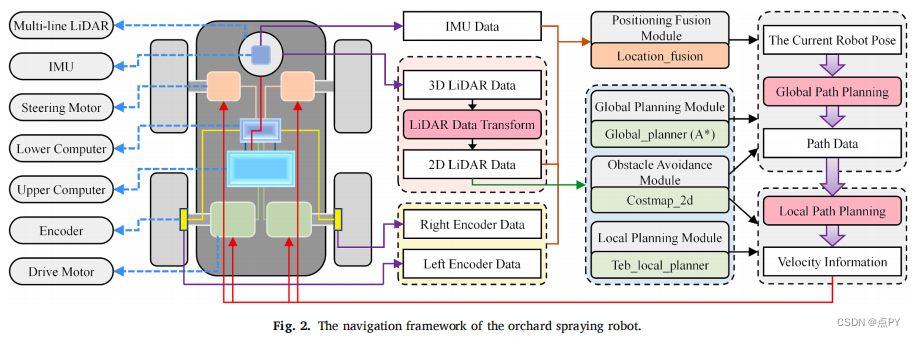
Navigation system for orchard spraying robot based on 3D LiDAR SLAM with NDT_ICP point cloud registration
果园喷洒机器人的自主导航可以有效地提高操作效率,减少工作量。传统的基于全球导航卫星系统(GNSS)的机器人导航方案由于果树树冠的干扰而导致果园的信号丢失。本文提出了一种基于多传感器装置和三维(三维)激光雷达同步定位与映射(SLAM)技术的果园喷洒机器人自动导航方案。该方案的第一步是使用三维激光雷达SLAM算法构建果园的三维点云图。随后,利用设计的点云图转换算法,将果园的三维点云图转换为包含果园关键特征信息的二维(2D)网格图。为了提高果园点云的映射精度,提出了一种将迭代点点(ICP)和正态分布变换(NDT)相结合的点云配准算法。该算法首先利用NDT算法进行粗点云配准,以获得变换参数。然后,将ICP算法结合得到的参数进行精细配准。针对避障问题,介绍了一种基于机器人操作系统(ROS)多线程通信机制的协同避障算法。在标准化纺锤形桃园中进行的实验试验,验证了利用所提出的NDT_ICP点云配准算法实现的SLAM映射轨迹的成功完成。映射轨迹与参考轨迹之间的平均绝对位姿误差为1.173 m,标准差为0.498 m。该机器人的定位和导航误差随着速度的提高而增加,在1.2 m/s的速度下观察到的定位偏差最大,最大的横向定位误差为7.04 cm。在不同速度为0.4、0.8和1.2 m/s下,机器人的平均横向导航误差不超过16 cm,平均航向偏差小于8◦。该机器人的定位精度和导航精度都足以满足果园喷洒机器人的自主操作要求。


















 8405
8405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











