







本节介绍测量元件的作用、组成结构、动态静态特性
测量元件的作用和组成
作用
测量元件也叫传感器
测量元件的作用是将被测量按照某种规律转换成容易处理的另一种量
一般来说容易处理的量是电信号
在控制系统中:
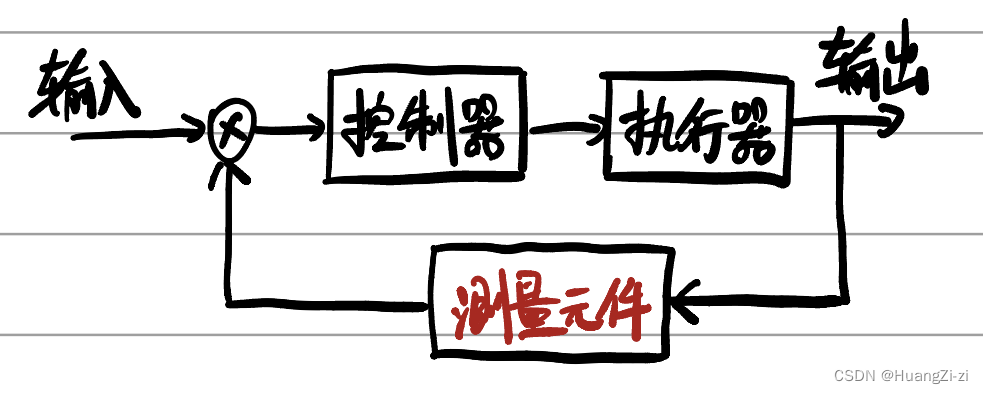
由于存在各种扰动,模型的结构、参数不确定等,用开环控制容易导致误差过大,因此通过测量元件获取被控量的信息并采取相应的控制方法来抑制不确定性的影响,即利用测量元件实现闭环控制
对于闭环系统,其精度、性能很大程度取决于测量元件的精度和性能
变送器:当传感器的输出为规定的标准信号时,称这个传感器为变送器。常用的标准信号如:电压0~ 10V,电流4~ 20mA,气压20~ 100kPa,其物理量的形式和数值范围都符合国际标准
组成
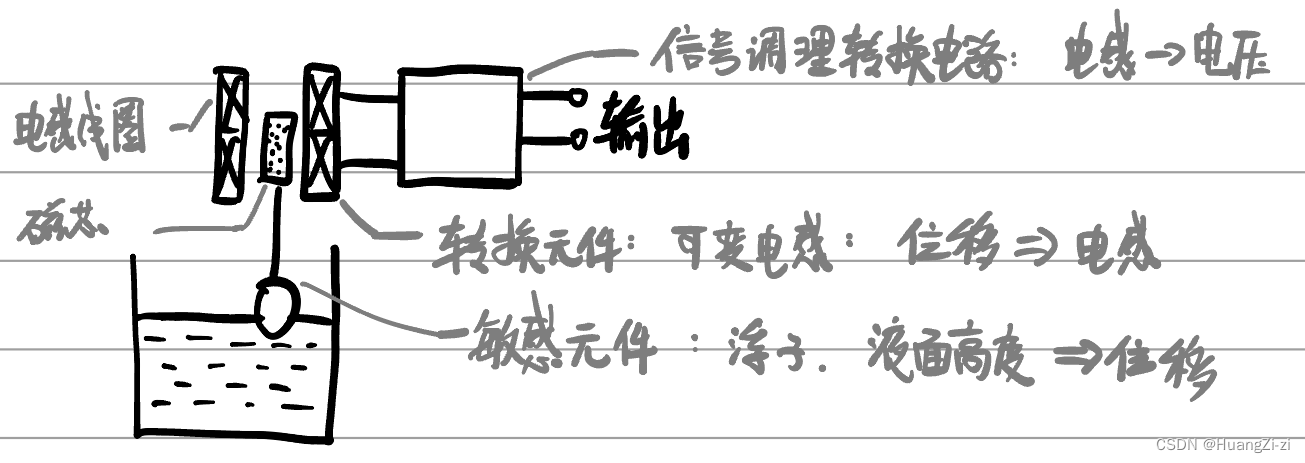
测量元件主要由三部分组成:

- 敏感元件:感受被测量并转化成另一种物理量
- 转换元件:将该种物理量转化成电路参量
- 信号调理转换电路:将电路参量经信号调节、转换、放大、运算、调制等,转换成特定形式的电信号
例如:
测量元件的特性
测量元件的特性主要指其输入和输出之间的关系,理想特性为输入输出一一对应。
测量元件的特性分为静特性和动特性
- 静特性:输入量和输出量都为常量,或变化极慢时输出和输入之间的关系
- 动特性:输入量和输出量都随时间变化时输出和输入的关系
测量元件的输出与输入关系可以用微分方程来描述。而当微分方程中所有微分项都为零时,就可得到静特性,因此静特性是动特性的一个特例
静特性
-
变换函数
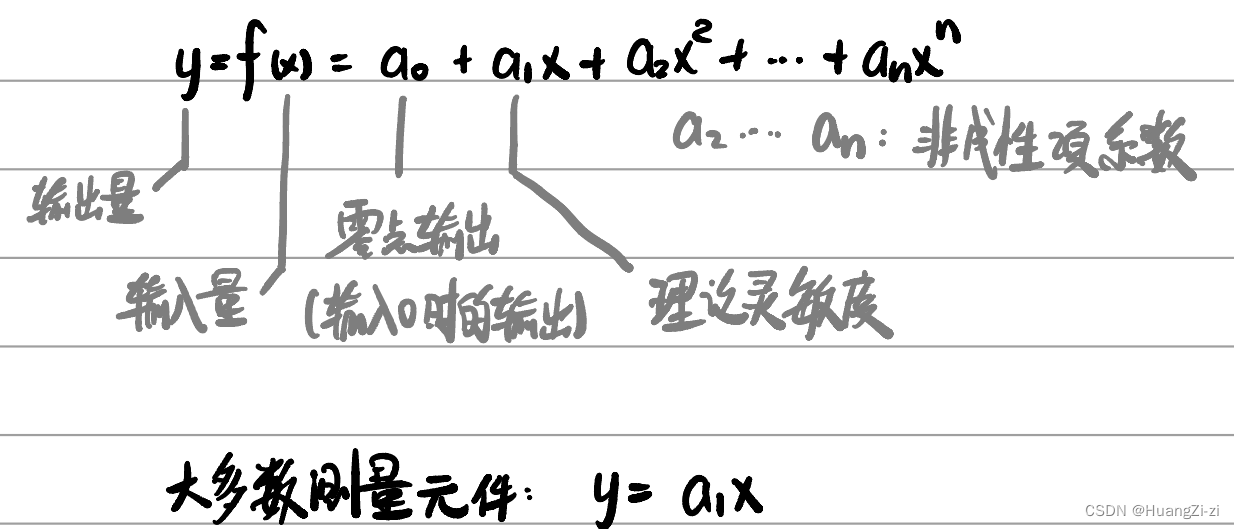
变换函数是描述静特性的数学方程
变换函数一般使用分析法建立,再根据实际使用确定和调整参数。而也有一部分变换函数采用统计分析、曲线拟合的方法建立。
拟合比较常用最小二乘法,可以用计算器计算。 -
灵敏度和线性度
灵敏度k:输出量的微小增量与相应的输入量的微小增量的比值。 k = Δ y Δ x = d y d x \displaystyle k=\frac{\Delta y}{\Delta x}=\frac{{\rm d}y}{{\rm d}x} k=ΔxΔy=dxdy,对于非线性的静特性,每一点的灵敏度不同;而线性的静特性,灵敏度保持恒定。
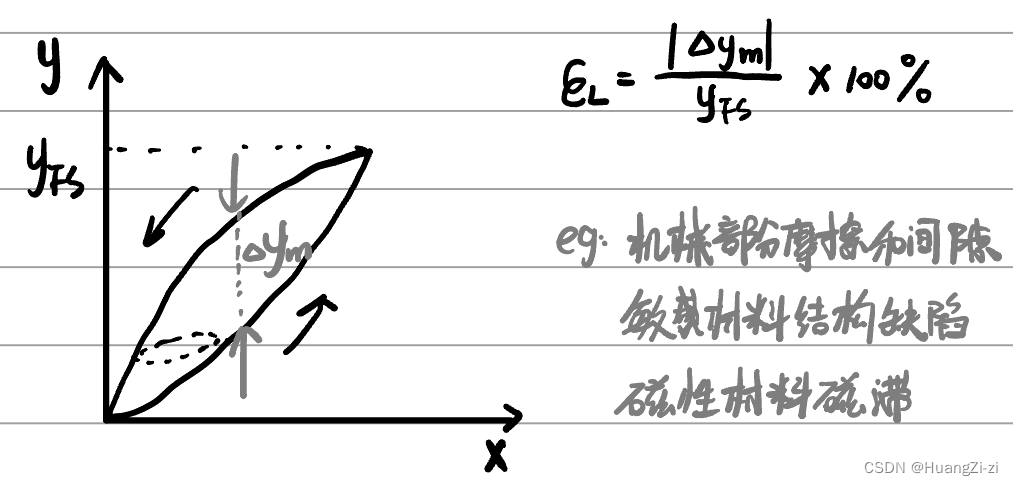
线性度(非线性误差) ε L \varepsilon_L εL:静特性曲线偏离某种拟合直线或规定直线的程度。 ε L = ∣ Δ y m ∣ y F S × 100 % \displaystyle \varepsilon_L=\frac{|\Delta y_m|}{y_{FS}}\times100\% εL=yFS∣Δym∣×100%
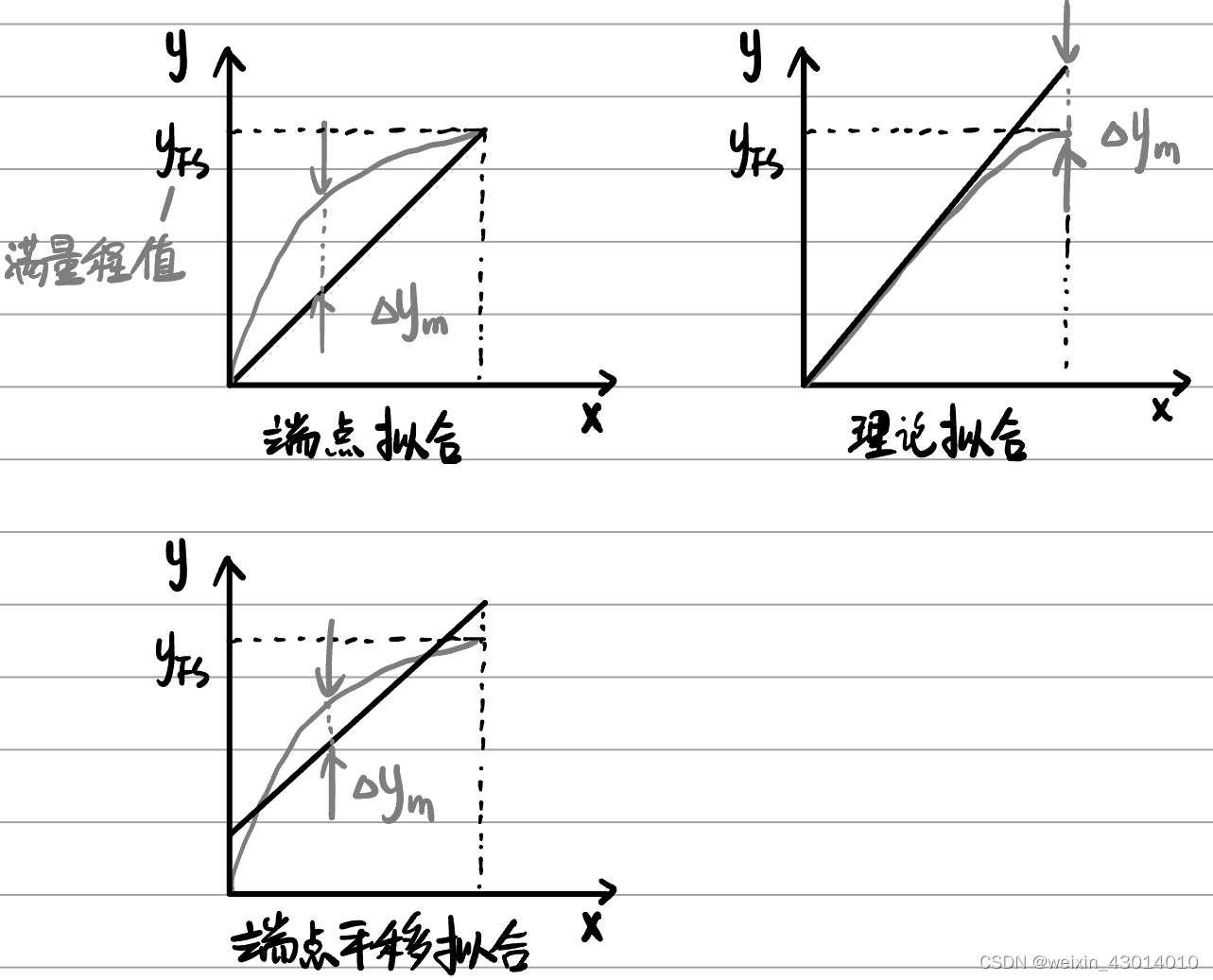
采用不同的方法选取拟合直线,可以得到不同的线性度。 -
滞环
或称迟滞,是指测量元件正反行程中输入输出曲线不重合的现象
滞环误差的计算与非线性误差计算方法相同
-
重复性误差
输入按同一个方向做全量程连续多次变化使所得特性曲线的不一致程度。
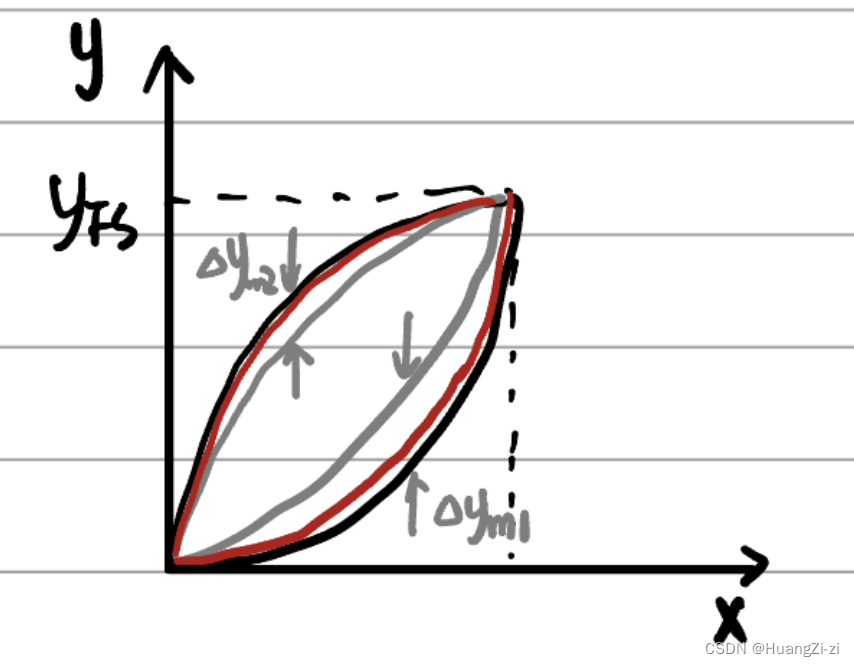
取两个不一致中较大的代入非线性误差计算公式计算 -
静态误差
全量程范围内任一点,测量元件输出值与理论输出值的偏离程度
一般把测试数据与理论输出的残差看作随机分布,则标准残差: σ = 1 n − 1 ∑ i = 1 n ( Δ y i ) 2 \sigma=\displaystyle \sqrt{\frac{1}{n-1}\sum_{i=1}^{n}(\Delta y_i)^2} σ=n−11i=1∑n(Δyi)2,然后取2或3 σ \sigma σ作为静态误差值
静态误差是一项综合性指标,包括了非线性误差、迟滞误差、重复性误差等单项误差
一些其他概念:
精度:真实值与测量值之差
绝对误差:测量值-真实值,有单位有正负
相对误差:
∣
测量值
−
真实值
∣
∣
测量值
∣
×
100
%
\frac{|测量值-真实值|}{|测量值|}\times100\%
∣测量值∣∣测量值−真实值∣×100%
-
测量范围和量程
测量范围:测量元件能够满足规定精度时检测到的最小输入量和最大输入量
量程:测量元件能够满足规定精度时检测到的最大输入量和最小输入量之差
如果被测量的最小输入量为0,则可以不做区分 -
分辨率和分辨力
两者都表示传感器能检测被测量的最小增量
分辨率:以满量程的百分数表示
分辨力:以最小量程的单位值表示,有量纲。在最小输入处的分辨力称为阈值 -
稳定性:
测量元件在不同环境和长时间运行时输出特性的改变程度。改变程度越小,稳定性越好 -
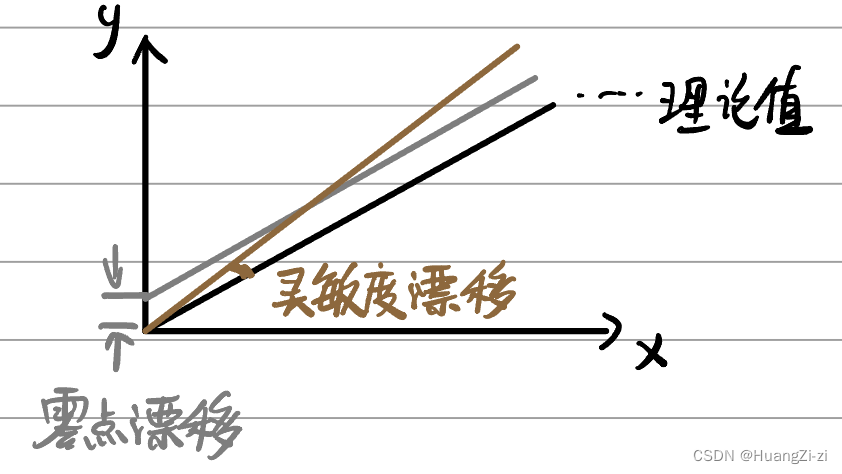
漂移:
在外界干扰下,传感器输出量发生与输入量无关的或不需要的变化。漂移包括零点漂移和灵敏度漂移等。
动特性
测量元件的输入量从一个数值变到另一个数值的过程中,呈现的特性就是动特性。
有三种描述方式:微分方程,传递函数,频率特性
测量元件按照其传递函数形式可以分为0阶、1阶、2阶
0阶测量元件:传递函数为K,
y
=
K
x
y=Kx
y=Kx,大部分测量元件都可以看成是零阶,对应「比例环节」
1阶:对应「惯性环节」
2阶:对应「震荡环节」
这一个部分可以参照自动控制原理的内容,就不再赘述了。
传送门

















 793
793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









