







PCL最近点迭代ICP算法实现点云配准
1. 效果图
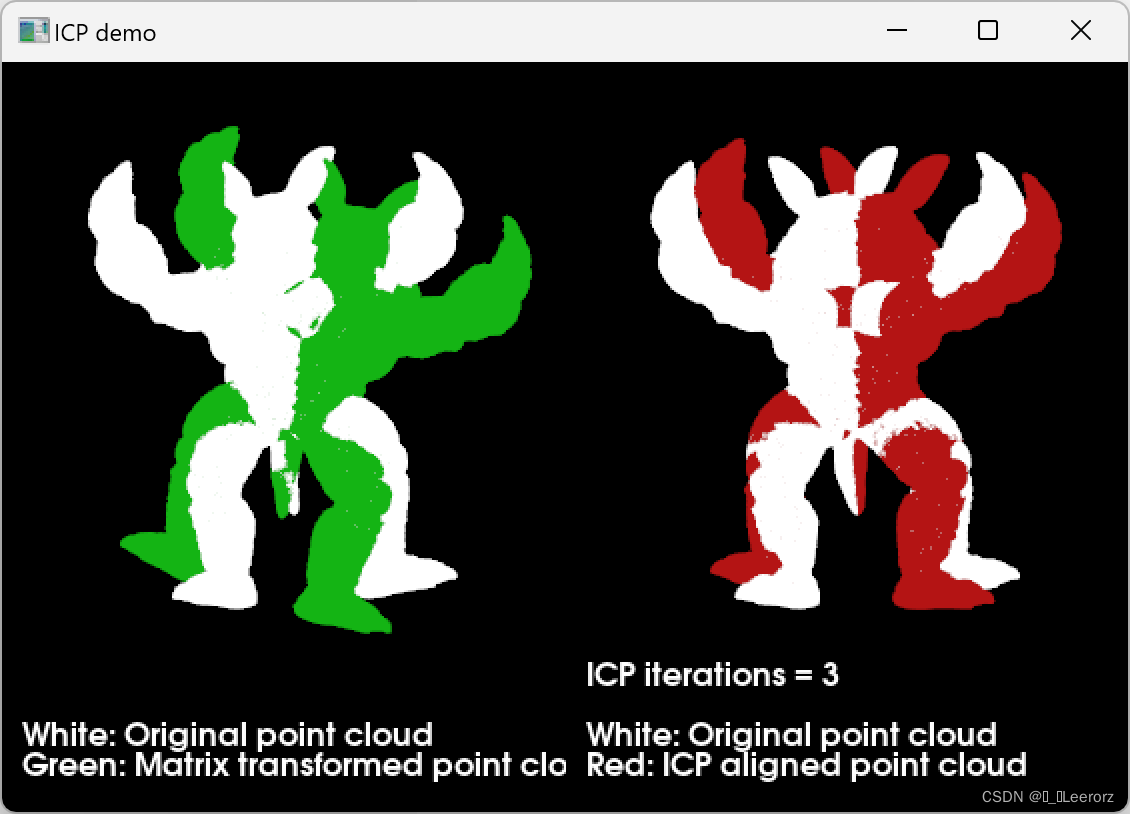
1.1 icp迭代至3次时
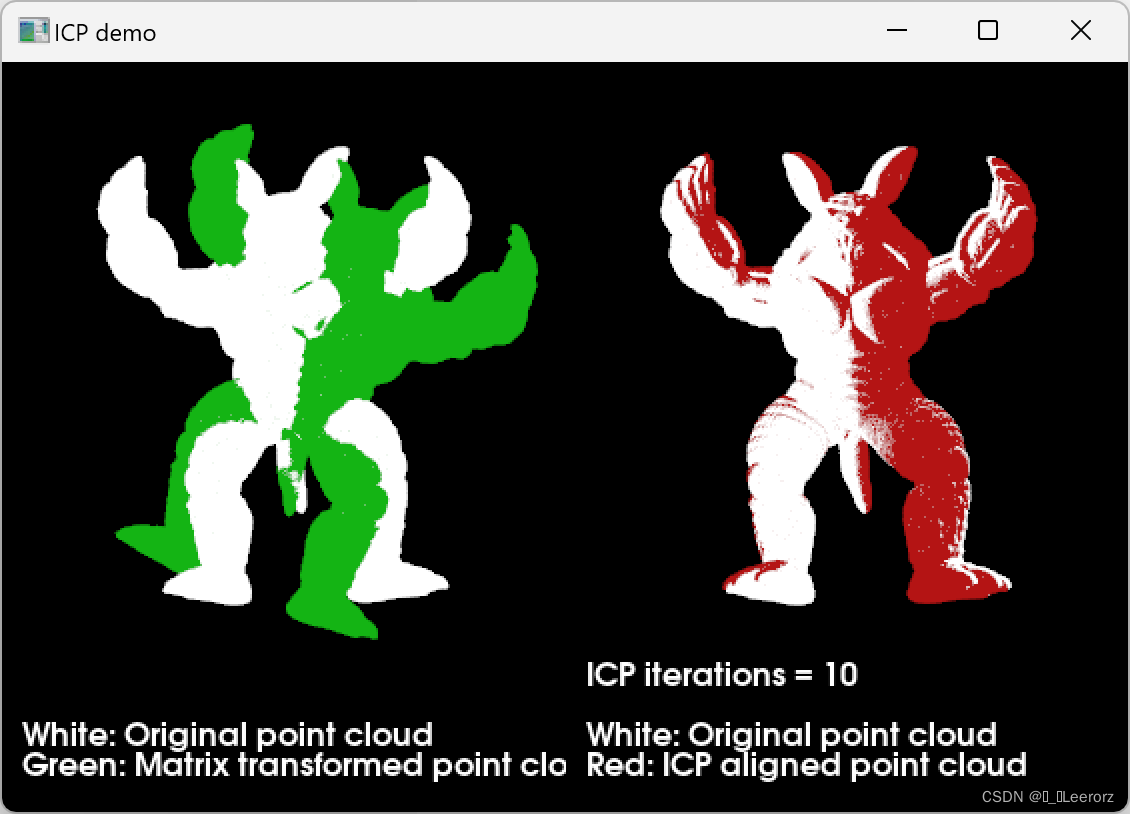
1.2 icp迭代至10次时
1.3 icp迭代至19次时
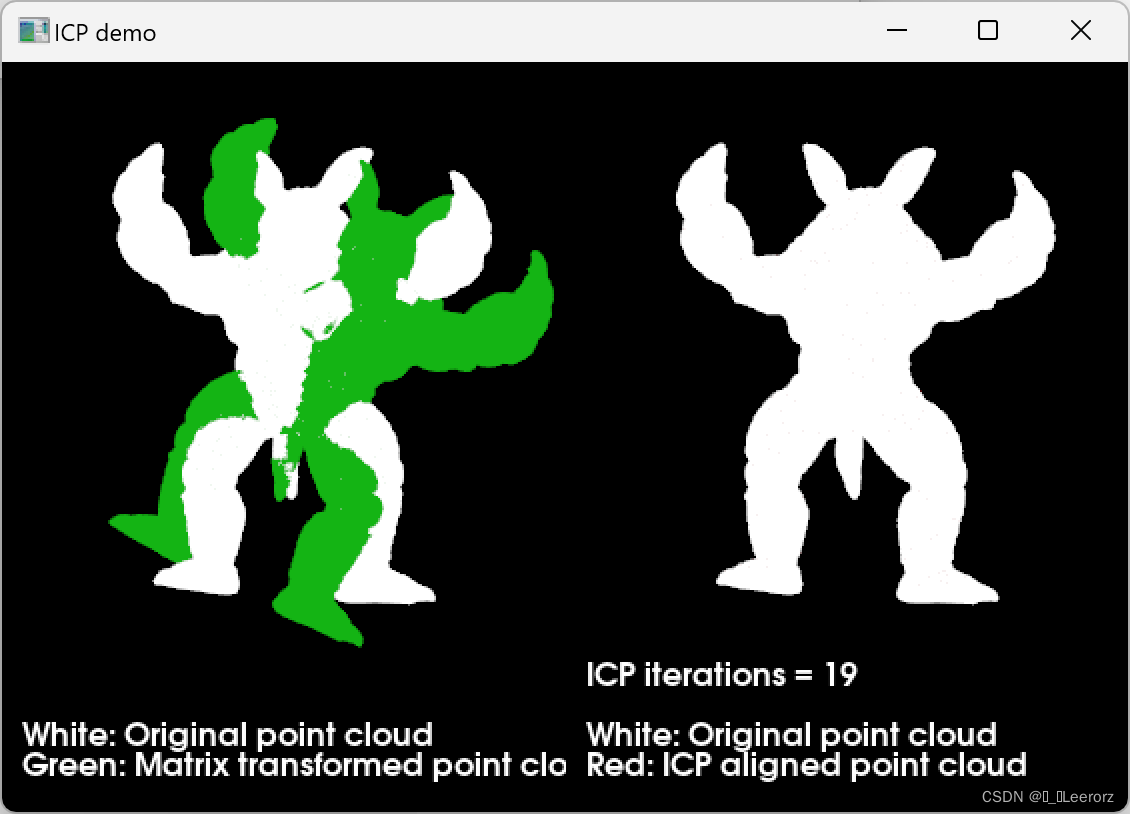
从上图中可以看出,迭代至19次时,配准已经完成
2. ICP基础知识
2.1 配准?配准的目的?
将从不同的点云视图一致地对齐到同一个模型中的过程,可以称为点云配准。配准的目标是在不同的视图中获得相关联的位置点和方向,相关联的位置点和方向是相对于同一个坐标系而言的,也就是说需要在不同坐标系的点云之间找到相对应的点,这些点可以用单个坐标系中模型的点来表征。换句话说,这个点是对实际场景中同一个对象,用不同的视角扫描之后得到的。
2.1 配准方法?
在源自不同视图的点云之间找对应点,计算刚性变换矩阵rigid transformation。
最著名的无序点云配准方法就是Iterative Clos

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1504
1504











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











