






- 高翔本尊在B站的讲课视频,建议看视频之前先把《视觉SLAM十四讲》浏览一遍
- 《视觉SLAM十四讲》代码按章节托管在这里
准备工作: - 如何在windows下安装VMware并创建linux虚拟机(ubuntu)
slam基本概念
- slam:搭载特定传感器的主体,在没有先验环境信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动
- 地图模型:广义的地图,百度地图是一种地图,空间环境中离散的点,用于定位的,在slam中也叫地图
- slam应用领域:机器人、无人机、无人驾驶、增强现实
- 入门相关书籍:The Bible: Multiple View Gemetry in Computer Vision
State Estimation for Robotics: A Matrix Lie Group Approch
Probabilistic Robotics - SLAM相关的两类传感器:
安装于环境中的,如二维码标识、GPS、导轨、磁条
携带于机器人本体上,如IMU, 激光、相机 - 视觉SLAM相机:
单目:没有深度
双目:通过视差计算深度 stereo
RGBD:通过物理方法测量深度,物理手段测量深度,如结构光
ToF,主动测量,功耗大,深度值准确,可测得每个像素的深度,
量程小,一般几十米,易受干扰,室外难以适用(结构光易受自然光干扰) - 视觉SLAM框架:前端VO,后端Optimization, 回环检测:Loop Closing, 建图:Mapping
slam问题的最简单描述
======= 未完===========
线性代数知识
向量的外积(叉乘)
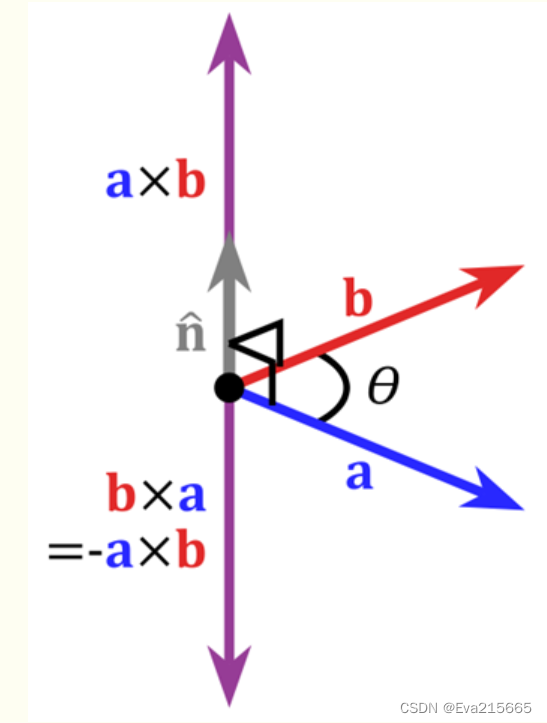
概述:两个向量的外积,又叫叉乘,其运算结果是一个向量而非标量,两个向量的外积与这两个向量组成的坐标平面垂直。
定义: 向量a与b的外积a×b是一个向量,其长度等于|a×b|=|a||b|sin(a,b),其方向正交于a与b,并且,(a,b,a×b)构成右手系。特别的,0×a=a×0,此外,对任意向量a,a×a=0。
对于向量a和向量b:
a和b的外积公式为:

其中:

向量外积的几何意义:
(事实上,三维以上就没有几何意义了,因此线性代数里讨论几何意义的意义不大,仅起到辅助理解作用)
在三维几何里,向量a和向量b的外积结果是一个法向量,该向量垂直于a和b向量构成的平面。在3D图像学中,外积的概念非常有用,可以通过两个向量的外积,生成第三个垂直于a,b的法向量,从而构建X、Y、Z坐标系。如下图所示

















 366
366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









