









1. 常用模式


-
回零模式 (Homing Mode):顾名思义,用于寻零

-
轮廓位置模式(Profile Position Mode):上位机给定目标绝对/相对位置、速度、加减速参数,伺服内部的轨迹发生器根据以上参数生成目标位置曲线指令,经由驱动器内部实现三环控制

-
轮廓速度模式(Profile Velocity Mode):上位机给定目标速度、加减速参数,发至驱动器经由内部实现两环控制

-
轮廓转矩模式(Profile Torque Mode):上位控制器将目标转矩6071h、转矩斜坡常数6087h发送给伺服驱动器,转矩调节由伺服内部执行 -
周期同步位置模式(Cyclic Synchronous Position Mode):周期同步位置模式下,上位控制器完成位置指令规划,然后将规划好的目标位置607Ah以周期性同步的方式发送给伺服驱动器,位置、速度、转矩控制由伺服驱动器内部完成。与轮廓位置模式(Profile Position Mode )不同,其轨迹发生器位于控制器端,而非驱动器内。可以设置附加的速度前馈(Velocity offset)或转矩前馈(Torque offset)。

-
周期同步速度模式(Cyclic Synchronous Velocity Mode):控制器将计算好的目标速度60FF周期性同步的发送给伺服驱动器,经由驱动器实现两环控制。

-
周期同步转矩模式(Cyclic Synchronous Torque Mode):上位控制器将计算好的目标转矩6071h周期性同步的发送给伺服驱动器,转矩调节由伺服内部执行,当速度达到限幅值后将进入调速阶段。


PPM与CSPM的区别:
轮廓位置模式的Trajectory Generator在驱动器内,周期同步位置模式的Trajectory Generator在控制器内,而位置模式(Position Mode)、电子手轮模式(Master Encoder Mode)、脉冲/方向模式(Step Direction Mode)则不需要轨迹生成器
2. 控制模式的设置(EtherCAT通讯DS402协议)
(1)查看控制器支持的控制模式
通过6502h查看控制器支持的控制模式

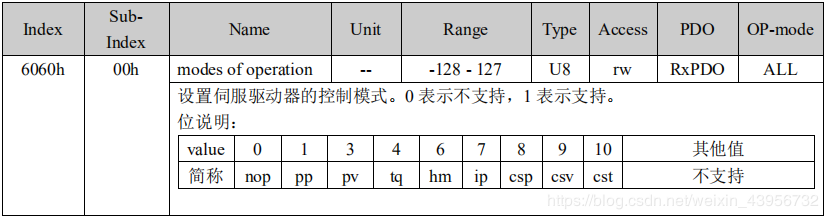
(2)设置控制器模式
通过6060h设置控制器模式
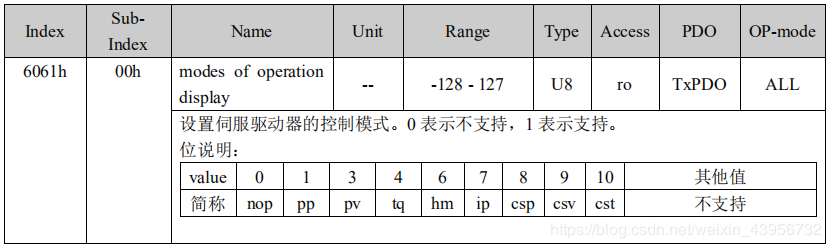
(3)查看当前控制模式
通过6061h查看当前控制模式,可以用此判断是否设置成功
参考:

















 7977
7977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









