






库卡机器人速度调整方式:
1.通过进度条来拖动速率值,这样可以实现根据需求实现KUKA机器人自动的速率和手动速率值
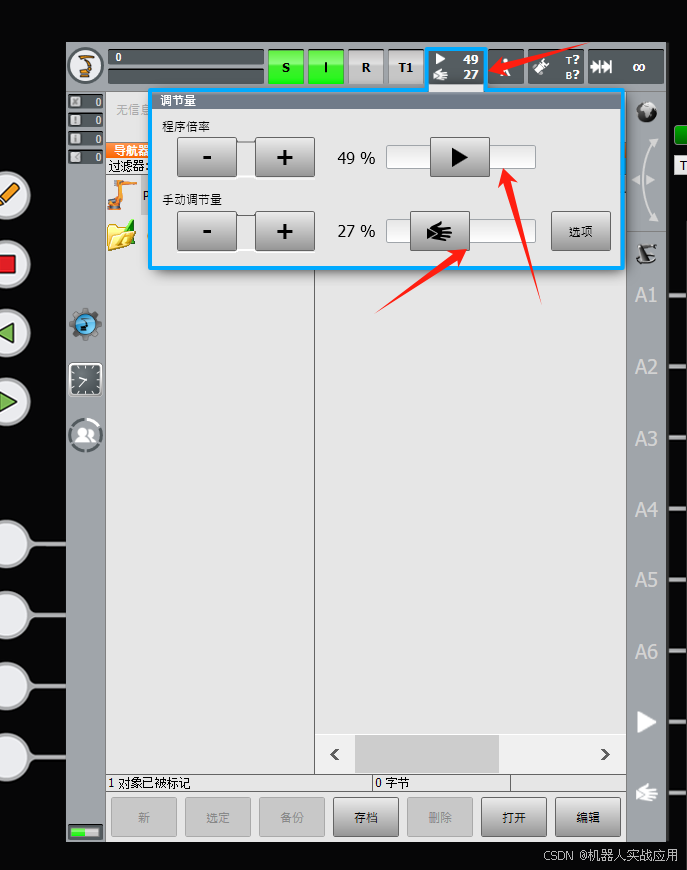
2.通过操作 "-" 或者 “+”来实现速率的调整,但是此方法有弊端,之能按照设定的值去调整。这样有时候想实现一个想要的数值就无法达到,那么方法来了!!!!!!!!!!!!

****************************************************正文开始咯*******************************************
1.在在投入允许模式下,HMI最小化。
2.按照以下路径找到 “SmartHMI.User.config" 这个文件 ;C:\KRC\USER......
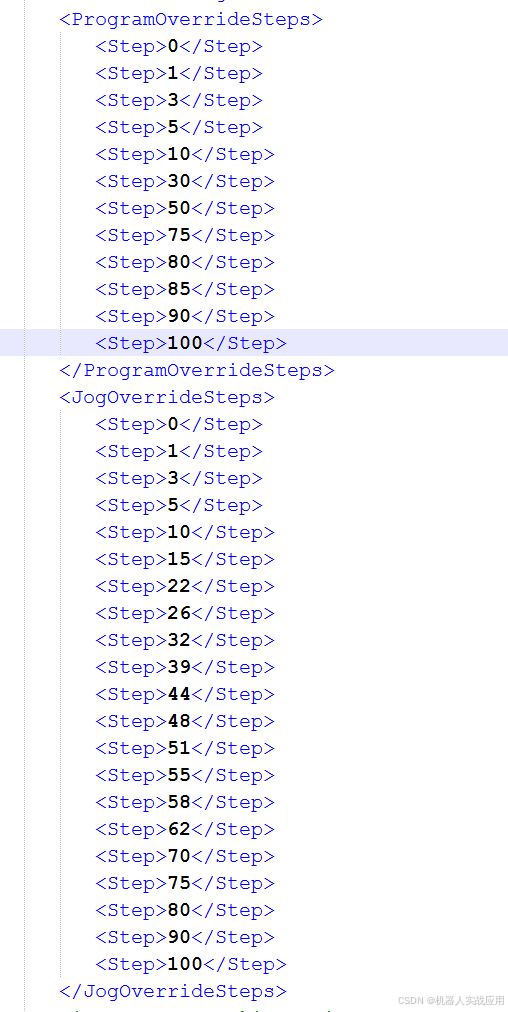
3.打开 “SmartHMI.User.config" 这个文件 ,找到<ProgramOverrideStep> (自动速率) 或者 <ProgramOverrideStep> (手动速率),在文件增加自己所定义的速度
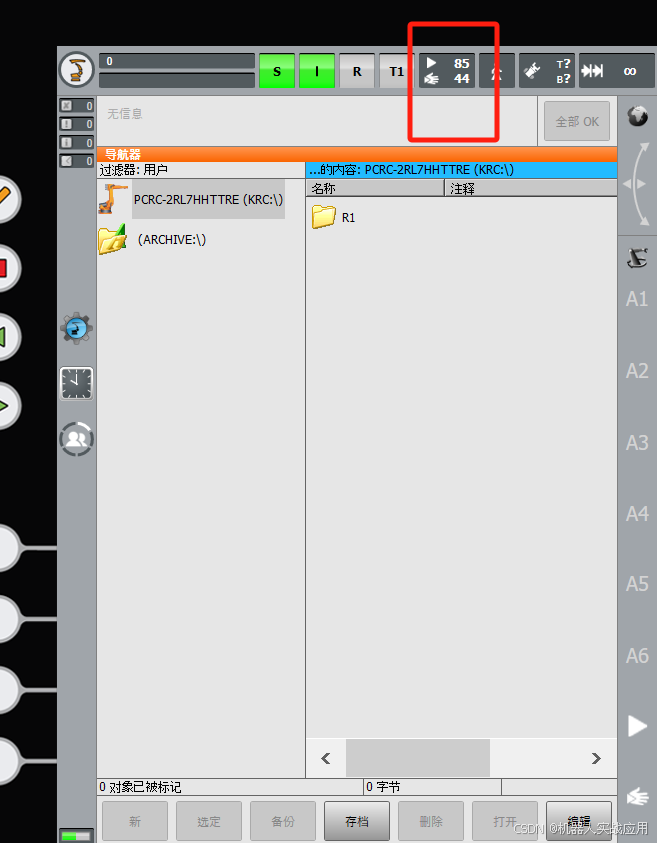
4.修改完记得保存哦,还需要机器人冷启动才能生效!!!


















 5928
5928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









