









协同自动驾驶系统开发的挑战:
1)进行现场实验的成本非常高。需要多辆昂贵的网联无人车参与,车辆越多危险性越高;需要超大的测试空间。
2)没有一个很好的仿真框架同时具有单车智能驾驶模块和协同驾驶功能,为研究人员提供验证和比较不同的协同自动驾驶(CDA)算法的开源工具。
OpenCDA
OpenCDA 是首个全栈协同自动驾驶仿真平台,提供了一个大型协同感知数据集,并提供基准场景数据库和协同自动驾驶基准算法和测试用例。用户可以用自定义算法替换任何默认模块,也可以生成自定义场景。
OpenCDA 由三部分组成:仿真工具、协同驾驶系统、场景管理器。
1.仿真工具:由不同的现存的仿真软件组成,为系统驾驶系统提供环境输入。
2. 协同驾驶系统:包含无人车常见的驾驶系统模块和协同驾驶模块,对每个模块进行了默认算法的配置。用户只需一行代码就可以用他们的自定义算法替换默认算法,而不影响其他部分。
1)Snese & Perception Layer:接收到的信息经过感知模块处理,检测,定位,轨迹预测。
2)Plan:生成轨迹,速度预测,转向等,传输给控制器产生最终的控制命令。
3)应用层:无人车之间的合作在应用层被激活,每个网联无人车将通过 V2X Stack交换状态信息(例如,车辆位置、信号相位和时间)、意图信息(例如,感知的环境、计划的车辆轨迹),并就计划达成一致(例如,形成一个排)。
4)Actuation layer:生成控制命令。
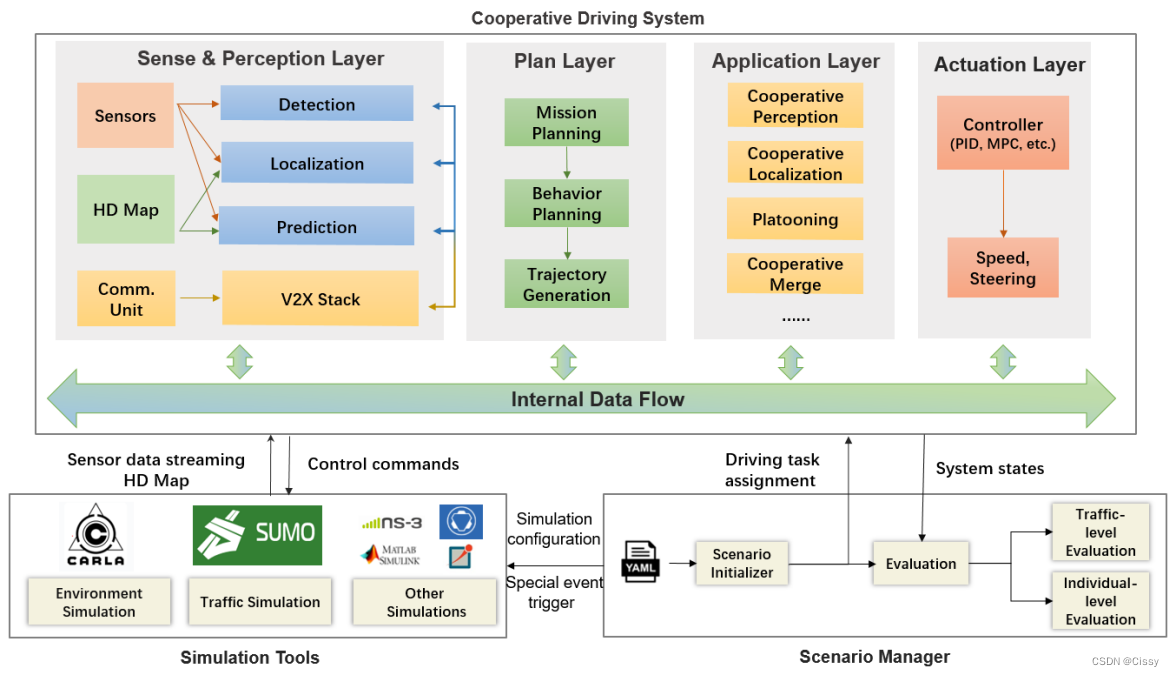
3. 场景管理器 :
1)定义交通场景:通过场景配置文件构建自定义的场景参数(场景的静态元素,如道路拓扑、周围建筑物、路面上的静态物体;动态元素,如交通流、交通信号状态、天气);也可以通过模型驱动方法找到合适的参数。场景配置加载器会将文件加载到 Python dictionary中,从而构建仿真环境。
2)分配任务:由无人车的起始位置和目的地以及要到达的中间位置构成驾驶任务。
3)全面评估:当无人车到达目的地时,驾驶任务被视为完成。然后在单车层面和整个交通系统层面评估协同驾驶系统的表现。
OpenCDA特点
- 支持全栈单车自动驾驶算法开发;
- V2X通信功能,协同驾驶功能模拟;
- 集成了各种仿真软件;
- 高度模块化,每个模块都有默认的算法,但用户可以轻易地替换成自定义的算法,进行公平地比较;
- 提供了很多的Benchmark(地图、算法、评估指标)。














 7973
7973











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









