






记录github项目https://github.com/ddhxm/PCDet_ros.git运行报错:
1.创建工作空间
mkdir -p /home/catkin_ws_fixed1/src
cd /home/catkin_ws_fixed1/src
catkin_init_workspace
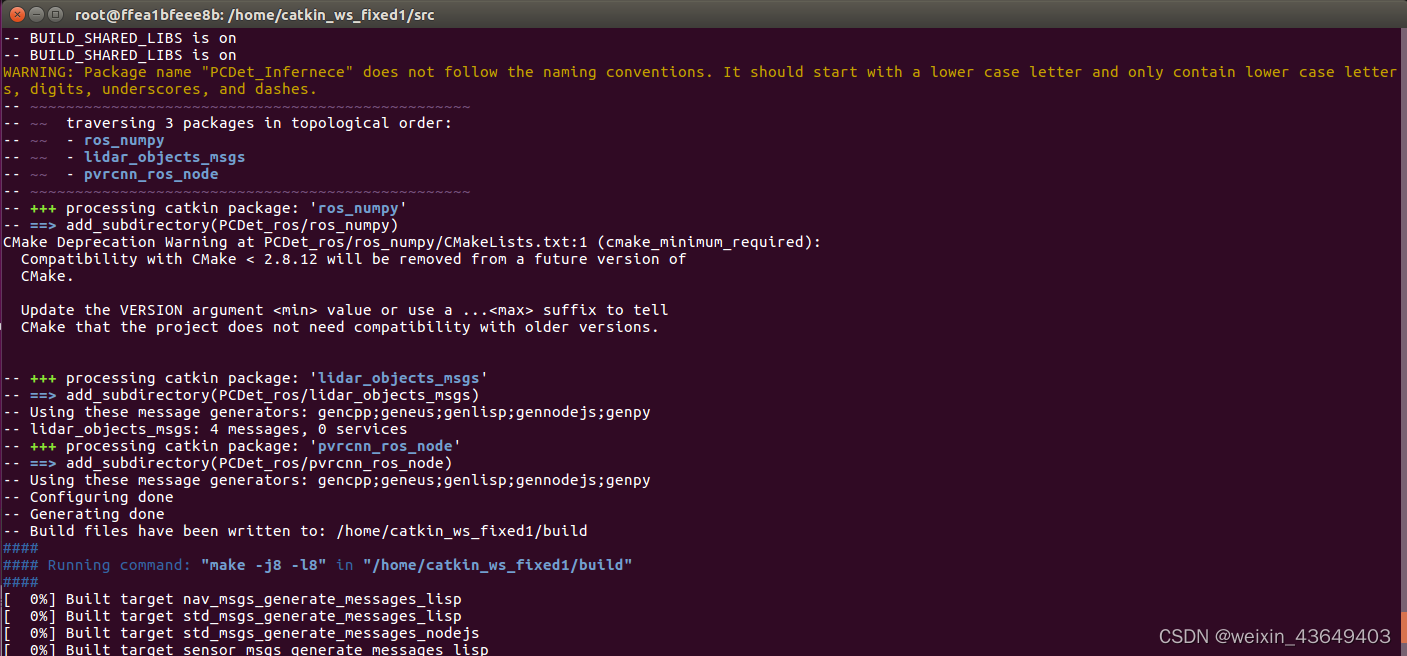
2.编译工作空间
cd catkin_ws_fixed1
catkin_make3.设置环境变量
source devel/setup.bash4.检查环境变量
echo $ROS_PACKAGE_PATH
5.将项目git clone 到src下
git clone --recursive https://github.com/ddhxm/PCDet_ros.git6.重新编译catkin make:编译所有包:
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
找到项目包中的3个功能包:
7.修改代码
1)detect.py代码
line1 :/usr/bin/python3
换上自己的python编译器的绝对路径。
line182:root path (.bin)
line440:config path (yaml文件)
line441:model path(模型文件)
line442:calib(标定文件)
2)修改second.yaml(根据以上model path决定)
line4:文件路径
8.下载缺少的包:
sudo pip3 install pyquaternionpython3 -m pip install --upgrade pip --default-timeout=100000
pip3 install opencv-python -i https://pypi.mirrors.ustc.edu.cn/simple/
9.解决Found no gpu问题:
1)重新安装显卡驱动(使用的是之前拷贝版本)
2) nvidia-smi 输出正常
3)重新启动一个容器,镜像44d86b82079d
docker run -it --gpus all --restart="always" -v/tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY 44d86b82079d /bin/bashCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
231017c7e818 44d86b82079d "/bin/bash" 5 days ago Up About an hour 22/tcp practical_leakey
4) 在容器中使用nvidia-smi测试是否成功
10.发布
编辑发布数据集的python文件
发布数据集:python3 kitti.py
订阅检测结果:rosrun pvrcnn_node detec.py
(别忘记roscore)
注:
数据集2011_09_11文件在百度网盘下载
kitti.py 自己编写
















 474
474











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









