






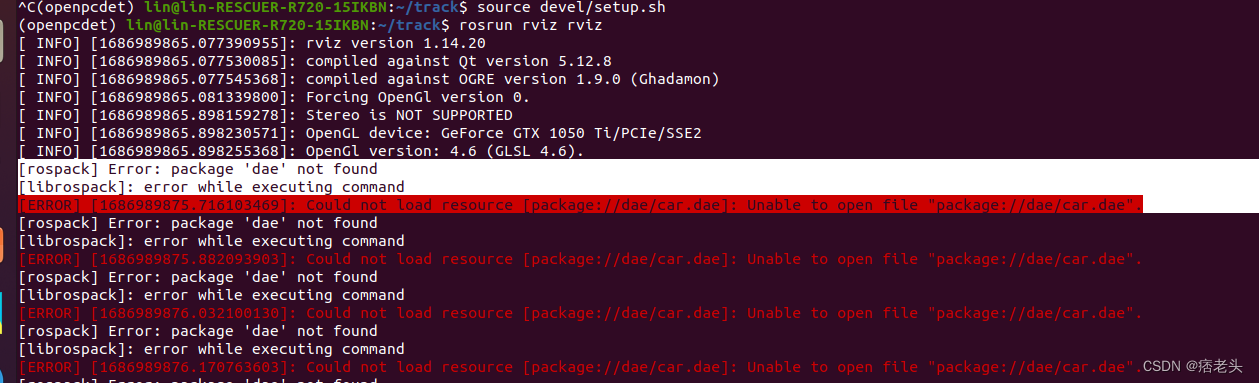
加载小车模型报如下错误:
[rospack] Error: package 'dae' not found
[librospack]: error while executing command
[ERROR] [1686989875.716103469]: Could not load resource [package://dae/car.dae]: Unable to open file "package://dae/car.dae".
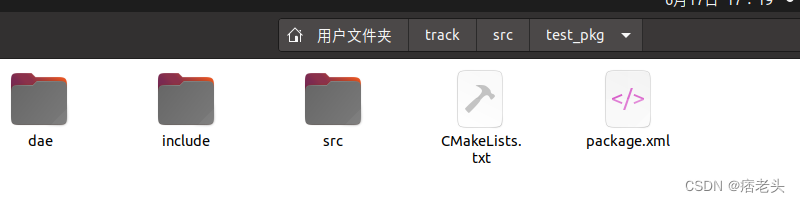
解决方案:在相应的package文件夹下打开终端(我本地是在track下),source一下,再打开rviz即可,如果没解决,说明没有创建功能包,我们需要创建一个功能包,我们进入track/src文件夹下(这里是你自己本地所创建的工作空间下的src),利用catkin_create_pkg指令创建test_pkg功能包,并添加roscpp(C++)、rospy(python)、std_msgs(话题消息)依赖。
$ cd src //进入src文件夹
$ catkin_create_pkg test_pkg roscpp rospy std_msgs //创建test_pkg功能包并添加3个依赖创建功能包之后,返回工程目录track,重新执行catkin_make执行编译,将dae模型文件放入test_pkg文件中
catkin_make
source devel/setup.sh
rosrun rviz rviz
然后再打开rviz,模型就可以成功加载啦
















 304
304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









