







开源代码: https://github.com/rpng/open_vins
安装说明: https://docs.openvins.com/pages.html
论文: OpenVINS A Research Platform for Visual-Inertial Estimation
论文摘要:
构建OpenVINS开源代码库,集成了多种trick
(1)流形上滑动窗口卡尔曼滤波
(2)在线相机内外参标定
(3)相机到惯性传感器的时间偏移校准
(4)不同SLAM landmark的表示方法
(5)一致的初始估计雅可比矩阵(FEJ)处理
(6)用于状态管理的模块化系统
(7)可扩展的可视化惯性系统模拟器
(8)用于算法评估的工具箱
开源代码各功能模块分类:
ov_core:
包含2d图像稀疏特征点跟踪
线性、G-N特征三角化
视觉-惯性估计器 (适用于任何相机和任何频率)
流形上的运算理论基础
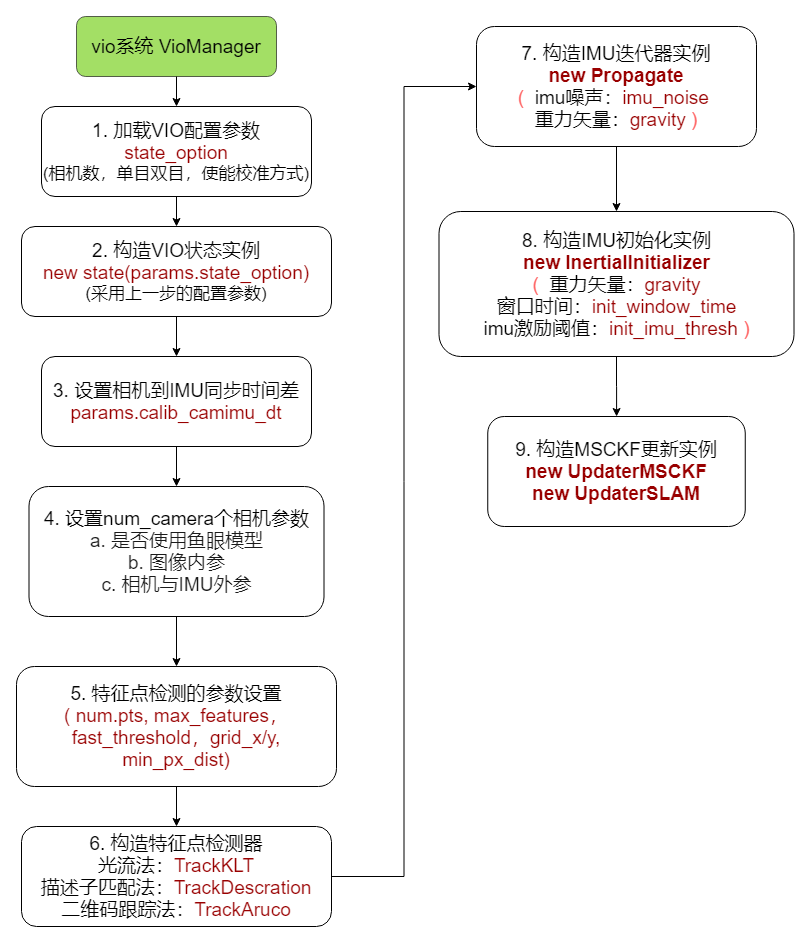
ov_msckf: 【基于FEJ 的可拓展滑动窗口误差状态模型视觉-惯性估计器】
标准的MSCKF
Camera-IMU 时间校准
FEJ
相机内参与外参校准
3d SLAM地标的不同表示方法
ov_eval:
包含轨迹对齐
轨迹绘制
轨迹精度一致性评估工具
Ros topic记录到文件
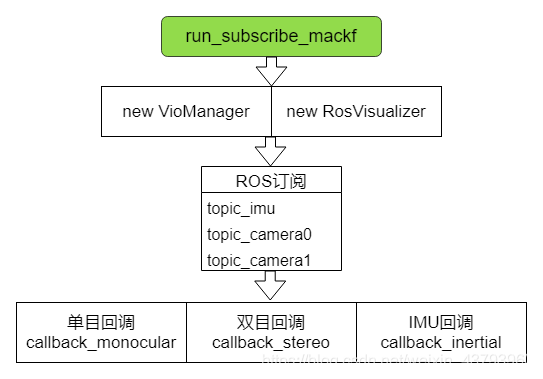
代码入口:

















 1612
1612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









