







写在前面
作为专攻机器人建图领域的研究生,不知道自己需要掌握多少知识,也不知道之后的发展方向,但多学一些知识总是没错的。
但是网上没有系统总结各种建图算法的博客,不能横向学习是很遗憾的事情。
因此这篇博客用来总结学习到的一些建图方法吧,希望能够给一些同样领域的人带来些许帮助。
同时如果大家有什么建图方面推荐的文章也可以在评论区讨论
(建图方向的大佬们求拉一把,呜呜呜,太难了)
经典地图表示方法
1.Voxel (Occupancy grid map)
普通的体素地图,把整个空间分成栅格,每个体素存储信息。坐标索引查询。
这个我倒是没遇到过

2.Mesh
网格地图,存储障碍物的表面信息。我理解的是把命中云连接起来就可以得到。一般都是图像生成的。
示意图大概就是这样子,matlab中的mesh。
如MIT的Kimera和一系列衍生物。
3.Surfel
点和面片组成,面片包括半径、法向量。一般也都是图像生成的。
第一篇应该是ElasticFusion,但是最出名的是SUMA++。

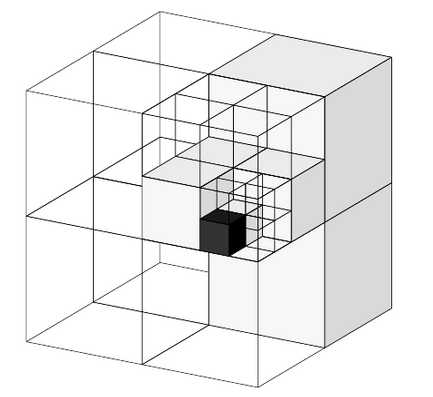
4.OctoMap
其实这可以说是我接触的第一个建图方法了,OctoMap凭借其高效存储的特点成为最经典的建图方法。
最经典,用起来也简单,已经嵌入ROS了,一般都是其基础上改进。
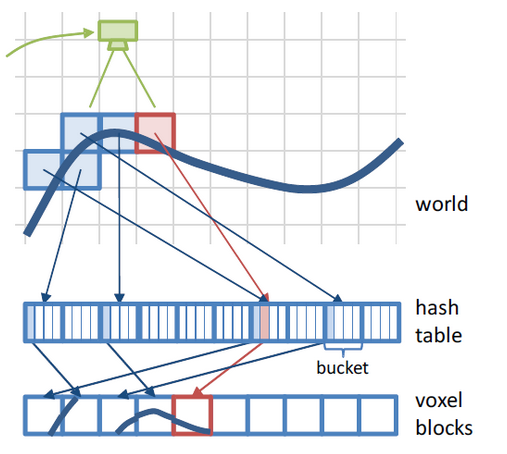
5.Voxel Hashing
为解决 volumetric fusion 重建时,重建的空间划分成等大小的 voxel,显存消耗太多,难以重建大场景,并且大量 voxel 更新耗费 GPU 资源问题,斯坦福图形学组提出了 voxel hashing 算法(参考文献:”Real-time 3D Reconstruction at Scale using Voxel Hashing”),voxel hashing 只在相机测量到的场景表面划分 voxel,而不是将整个空间都划分成 voxel,从而节省显存。算法用 hash 表的形式存储在场景表面划分的 voxel block(8x8x8 voxels),方便 voxel block 的查询。
用的最多的了,比如密歇根大学的S-BKI,BGK以及一系列衍生物还有我自己。
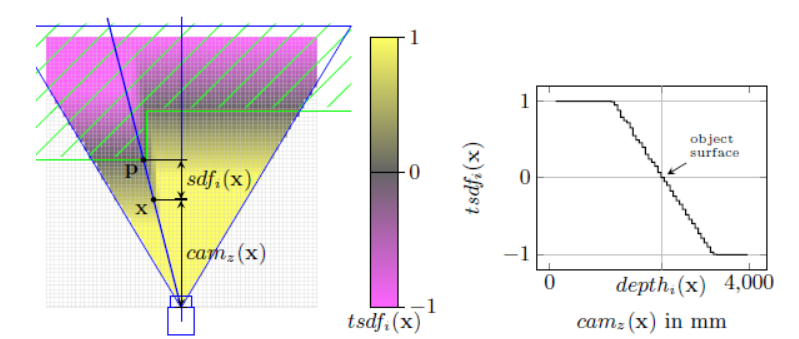
6.TSDF
属于隐式表面构建,假设有个相机传感器对环境进行观测,障碍物是一个曲面,相机与障碍物之间存在一个距离场,距离场里的数值表示当前点距离临近障碍物最接近的点之间的距离,障碍物外面的数值为正,障碍物内部为负数,并且可以以距离的大小来进行截断,比如正负两米内的点保留,不关心两米以外的点。然后把单元结果给marching cube算法构建表面。
经典,但没看到过。
7.ESDF
当进行轨迹规划时,需要知道机器人距离障碍物的梯度,所以不需要TSDF进行截断。保存体素到其最近障碍物的距离。
比如最经典的ETH的VoxBlox以及一系列衍生物。
先进语义建图算法
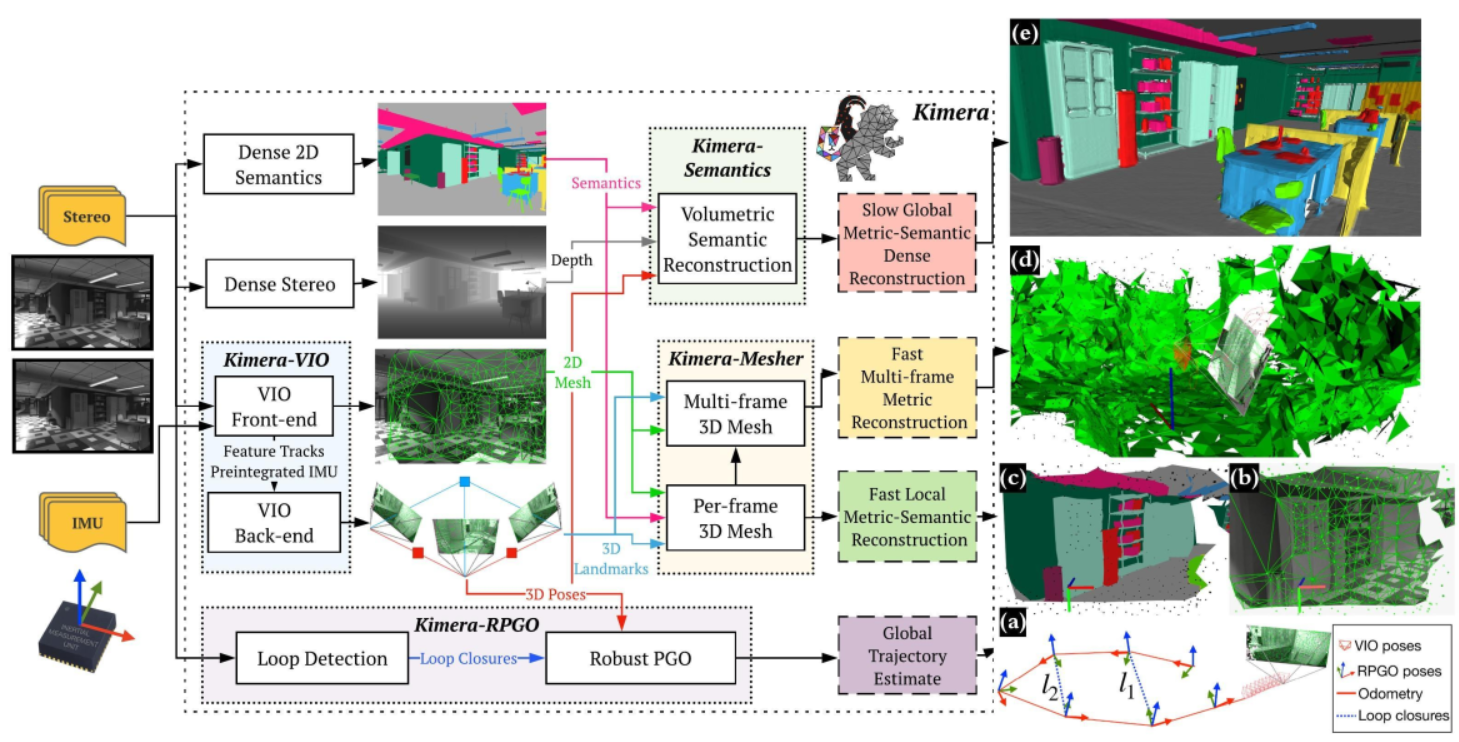
1.Kimera
Kimera an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping
MIT的,很出名。这算是一个SLAM框架了,从定位、位姿图优化到建图整个过程都有。最后剪出来了mesh地图。后面还衍生出multi-kimera。
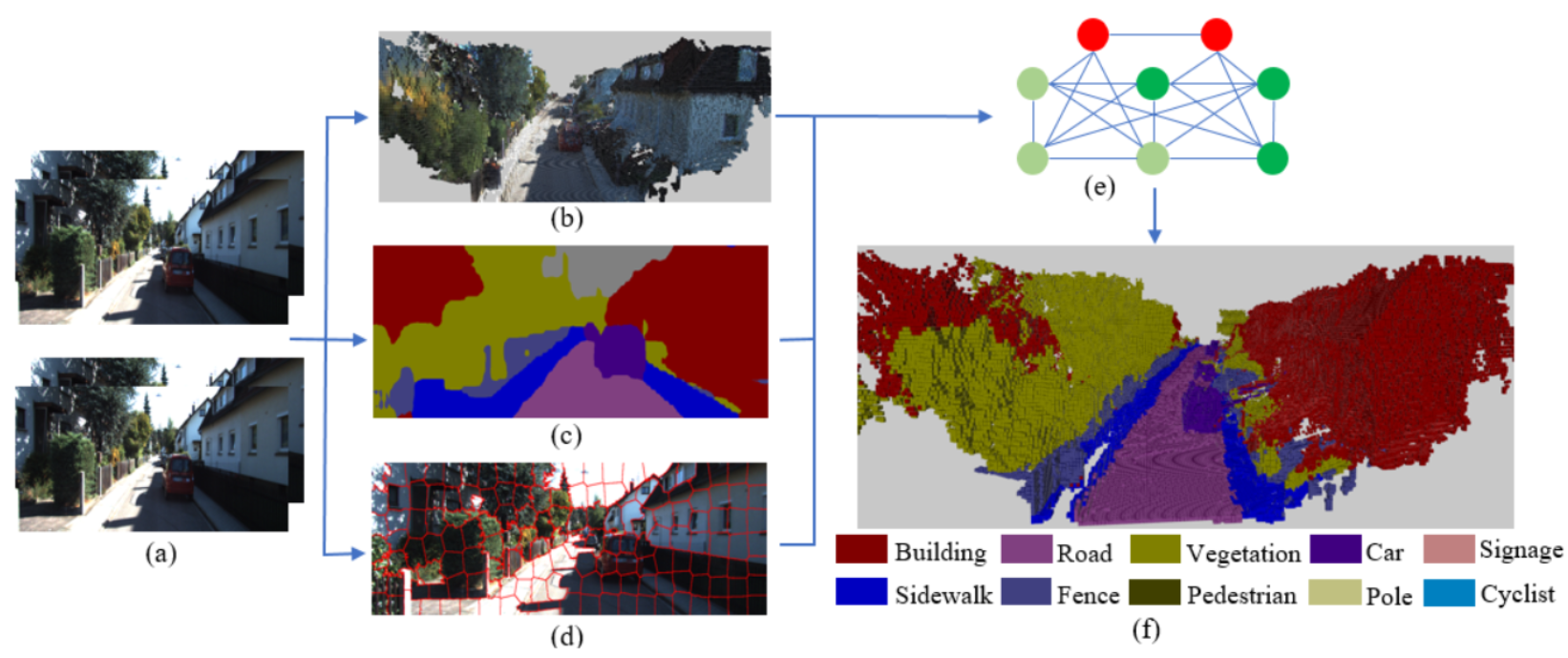
2.High Order CRFs
Semantic 3D Occupancy Mapping through Efficient High Order CRFs
卡内基梅隆大学,CRF优化的经典文章。
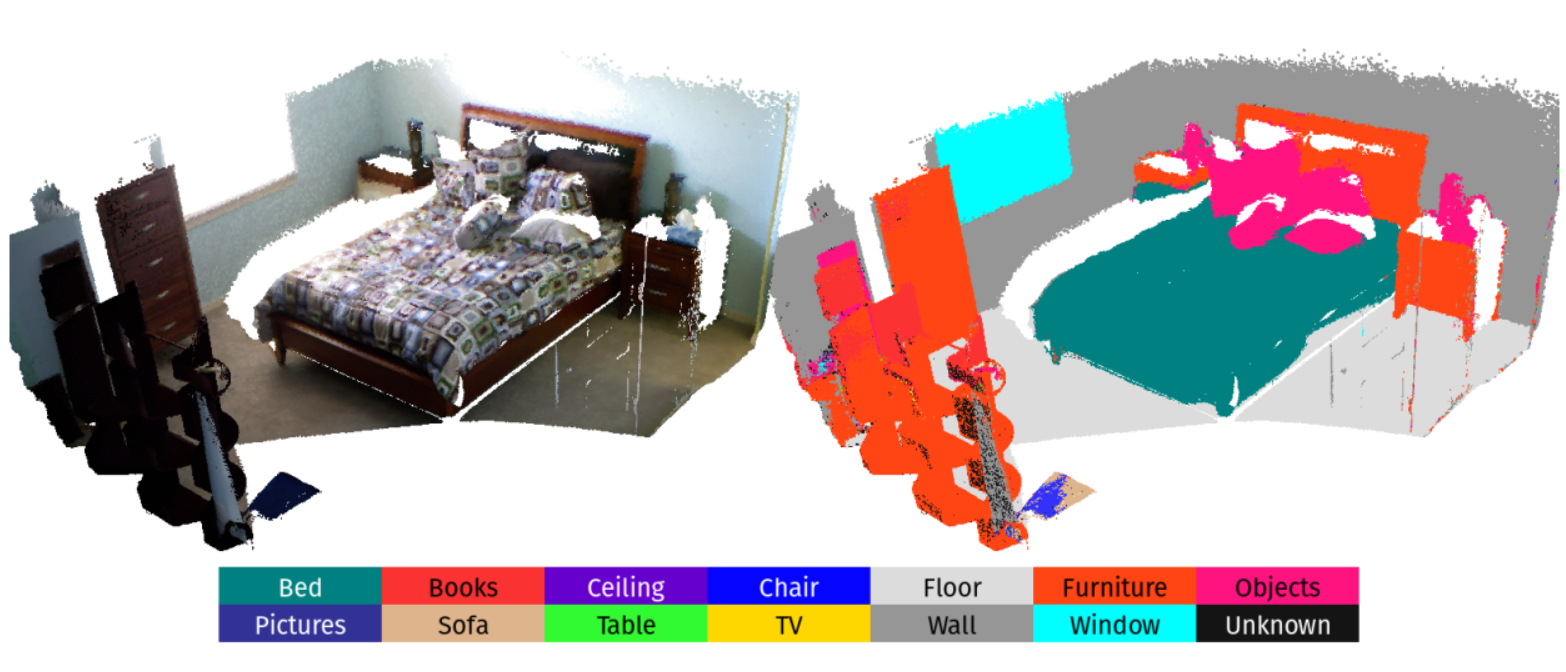
3.SemanticFusion
SemanticFusion Dense 3D Semantic Mapping with Convolutional Neural Networks
使用神经网络,以图片输入,达到了很好的建图效果。
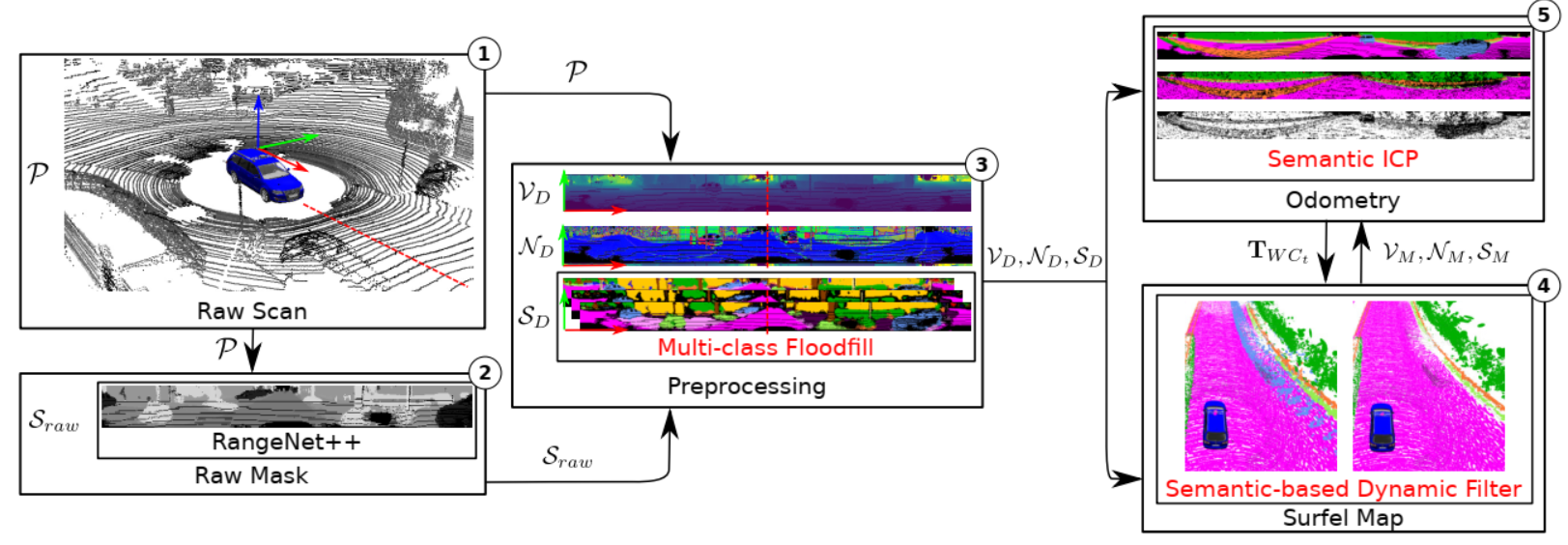
4.SUMA++
SuMa++ Efficient LIDAR-based Semantic SLAM
波恩大学的。也算是一种slam框架。直接使用点云分割,里程估计只用静态物体,从而语义精度也提高了。
先进连续建图算法
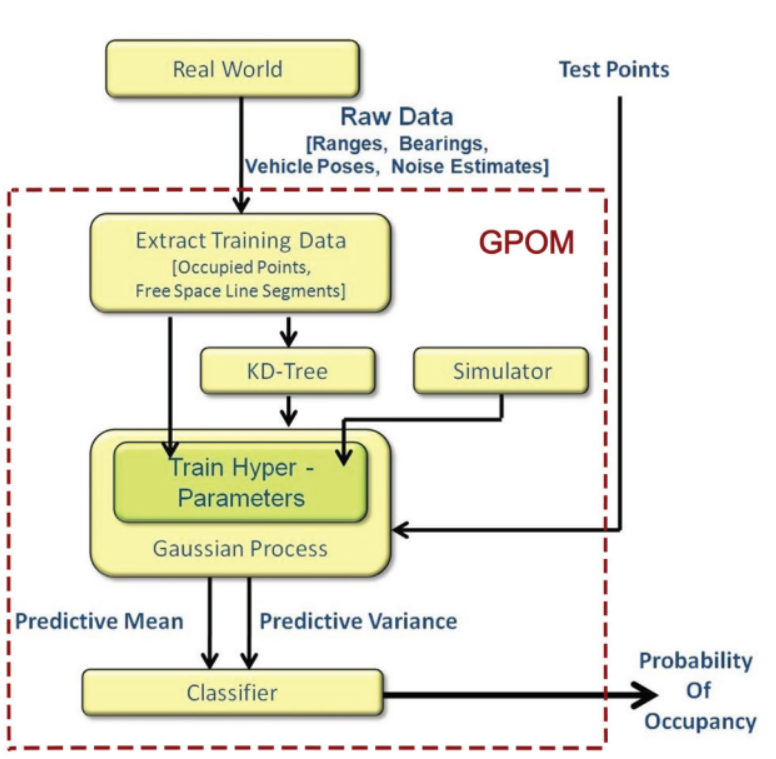
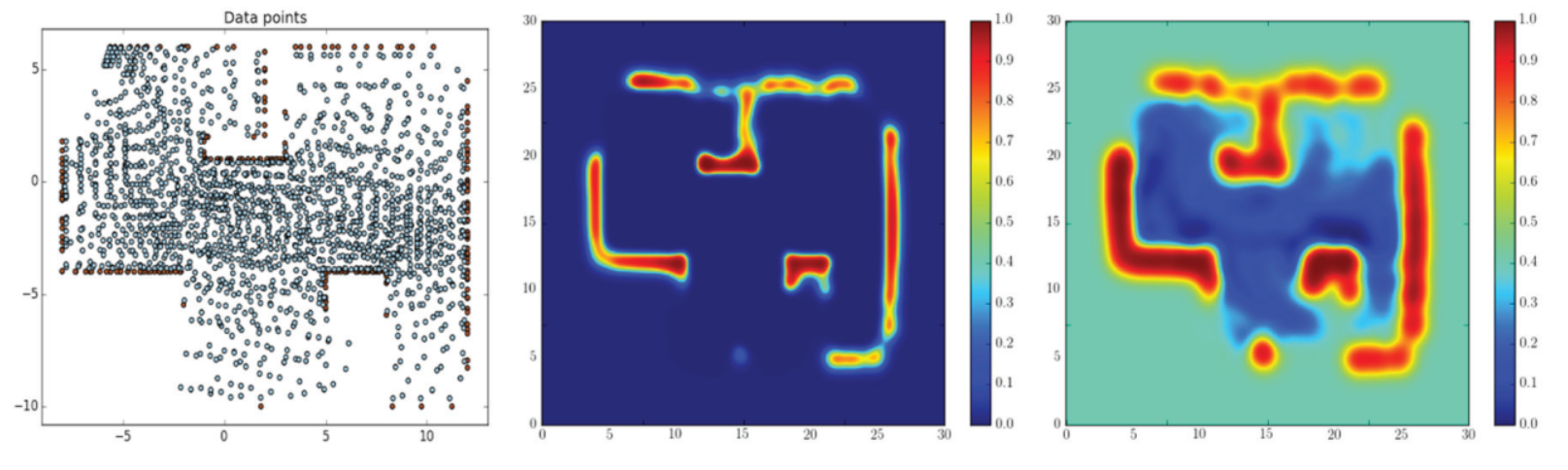
1.GPOM
Gaussian process occupancy maps
使用修正高斯过程作为非参数贝叶斯学习技术,引入地图上点之间的依赖关系,从而连续化,可以实现任意分辨率。
2.Hilbert map
Hilbert maps Scalable continuous occupancy mapping with stochastic gradient descent
也是分辨率任意,把数据投影到希尔伯特空间,在这个空间训练逻辑回归分类器。
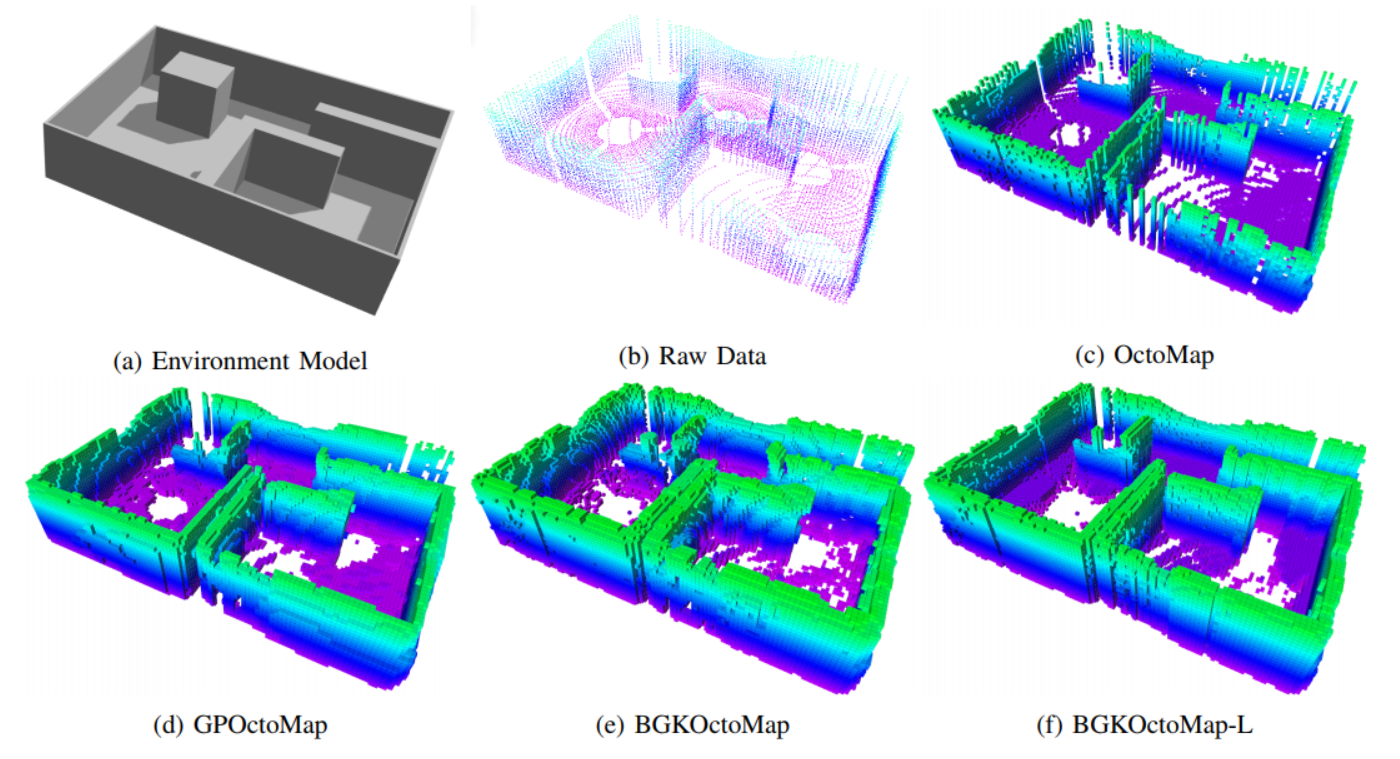
3.BGKOctoMap-L
Learning-aided 3D Occupancy Mapping with Bayesian Generalized Kernel Inference
将传统的计数模型CSM进行扩展,使用核函数光滑处理之后,就可以考虑到周围体素的观测了。-L增加了一个新的创新点,是离散点的采样。
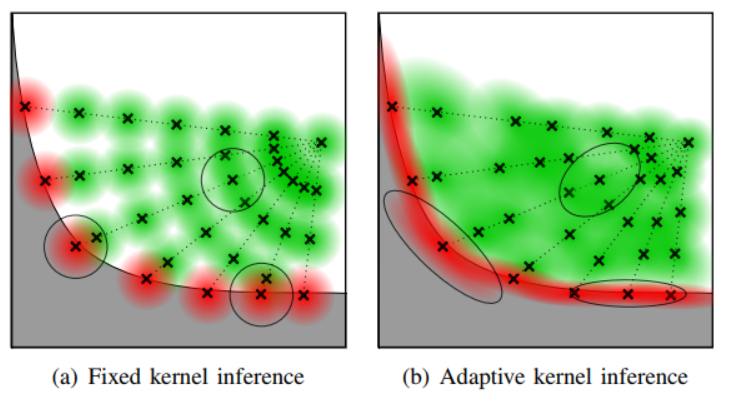
4.AKIMap
Adaptive Kernel Inference for Dense and Sharp Occupancy Grids
在BGKOctoMap基础上,核函数不再是径向基的,自适应地改变方向,适应边界。
先进全景建图算法
1.PanopticFusion
PanopticFusion: Online Volumetric Semantic Mapping at the Level of Stuff and Things
算是第一篇全景三维建图的,也是构建的mesh地图,图片语义分割加目标检测。主要难点在于前后帧同一个物体的检测。
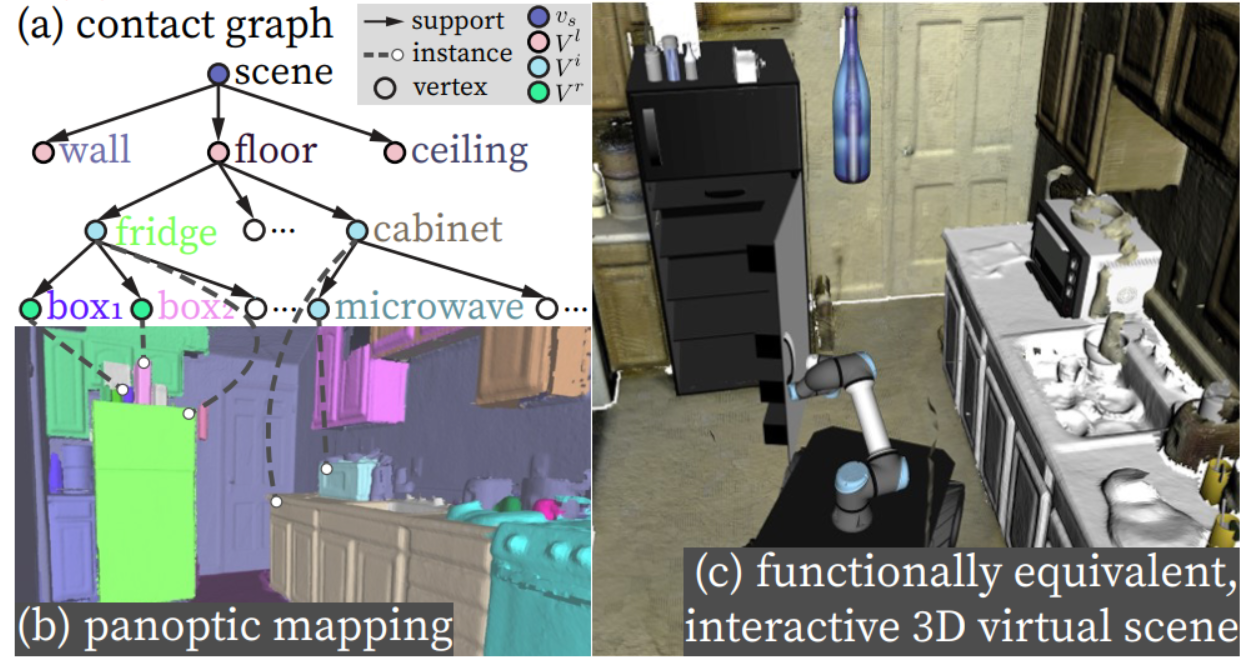
2.Reconstructing Interactive 3D Scenes
Reconstructing Interactive 3D Scenes by Panoptic Mapping and CAD Model Alignments
加利福尼亚大学洛杉矶分校。主要偏向于从全景地图转化为CAD可操作性的模型,从而可用于机器人任务规划。它的全景主要要包括物体的可操作性属性,而且具有连接图,也算是3D场景图。
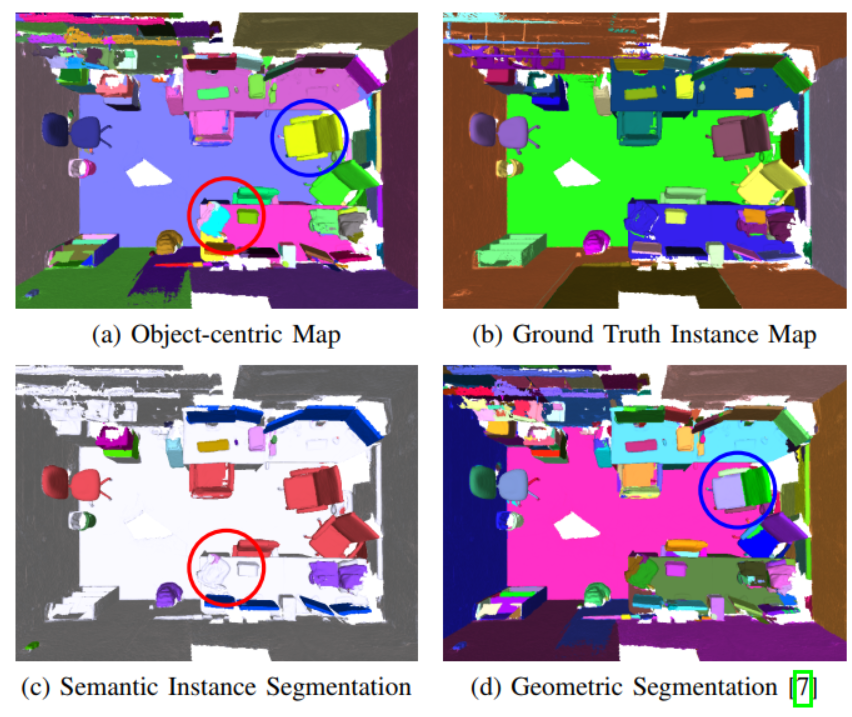
3.VoxBlox++
Volumetric Instance-Aware Semantic Mapping and 3D Object Discovery
也是ETH的,所以也是TSDF建图。把几何分割和语义实例分割结合起来,这样不仅知道了训练好的实例,还能发现没有训练过的实例。
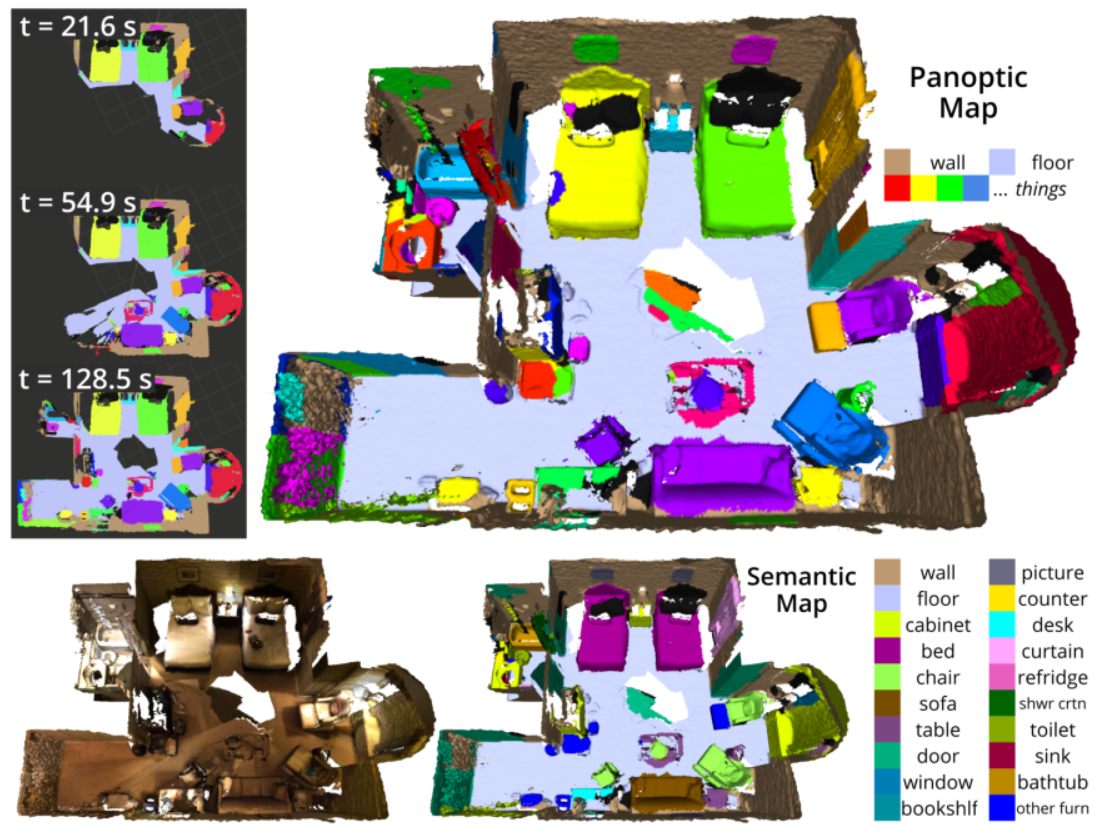
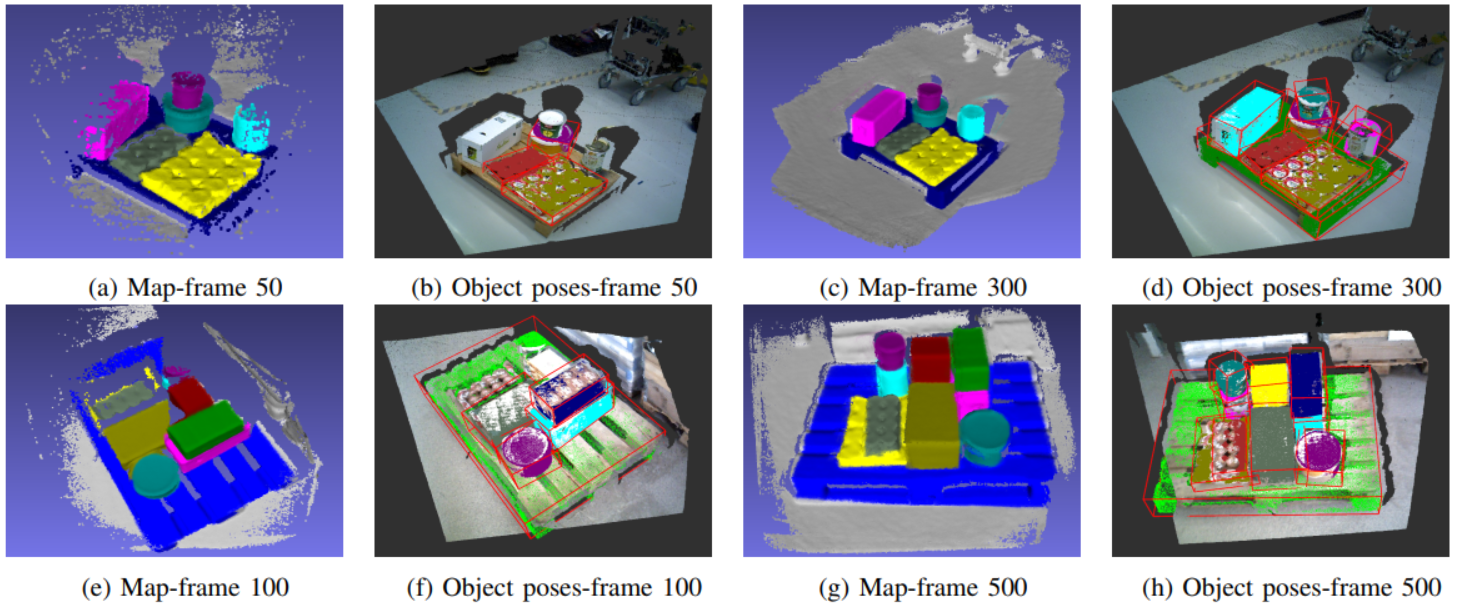
4.Panoptic-mope
Panoptic 3D Mapping and Object Pose Estimation Using Adaptively Weighted Semantic Information
RGB全景+物体6D姿态,构建了surfel地图。主要创新在物体姿态估计,相机位姿中考虑各种误差,是个网络。
5.Meaningful Maps
Meaningful Maps With Object-Oriented Semantic Mapping
两层,在普通点云基础上进行实例分割,知道点云中那些是物体,物体的这一部分点云会一起移动。

先进3D场景图算法
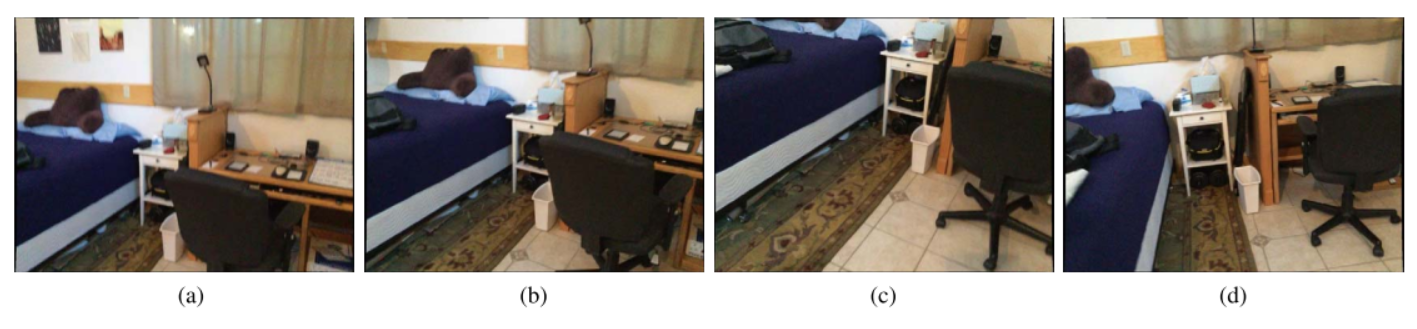
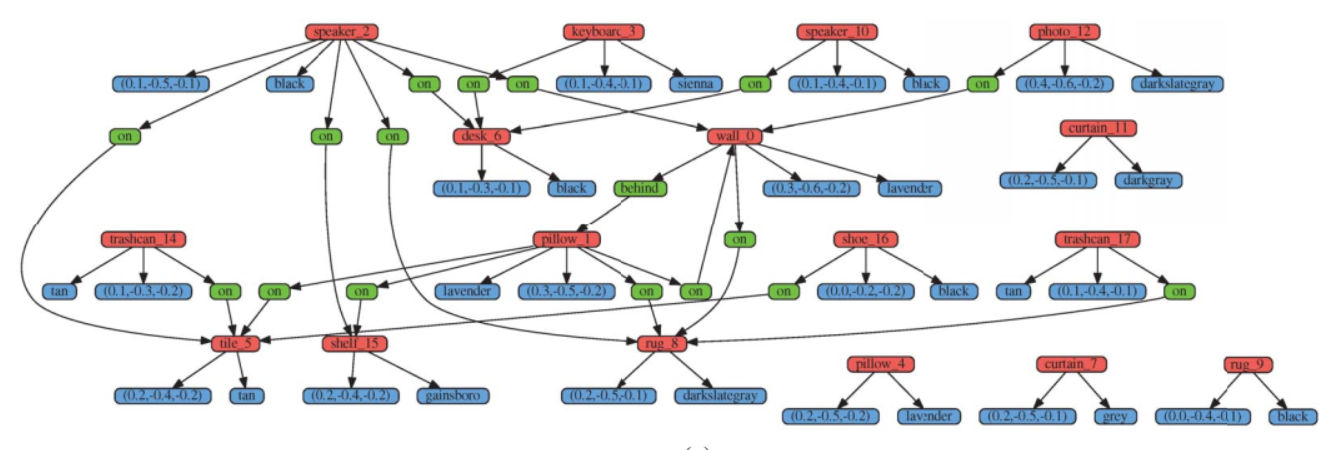
1. A Sparse and Semantic Representation
A Sparse and Semantic Representation of Physical Environments for Intelligent Agents
时间上来看属于第一篇3D场景图的,但不太严格算。因为是每个图像生成一个场景图,然后一系列图像连接起来,融合为全局的。
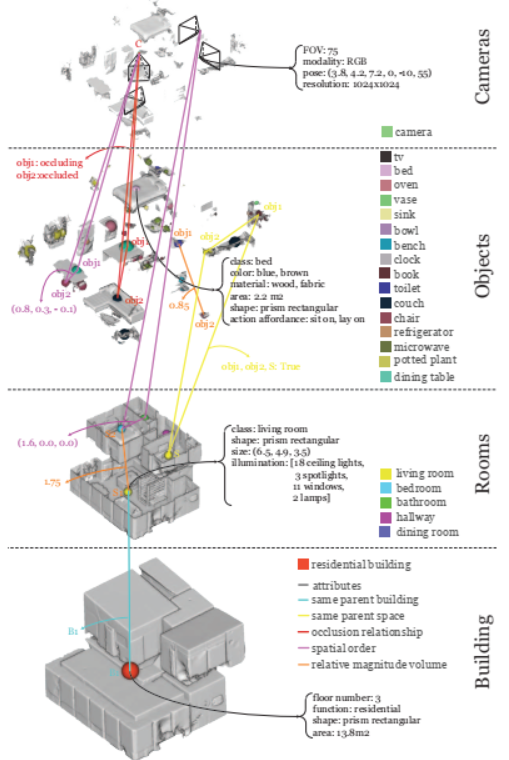
2. A structure for unified semantics, 3D space, and camera
3D Scene Graph: A structure for unified semantics, 3D space, and camera
公认的第一篇,真正从三维角度建立的场景图。输入三维网格地图和环视图像,输出整个建图的图,包括对象层,房间层,相机层。把图像中检测出来的东西放到了三维地图中。
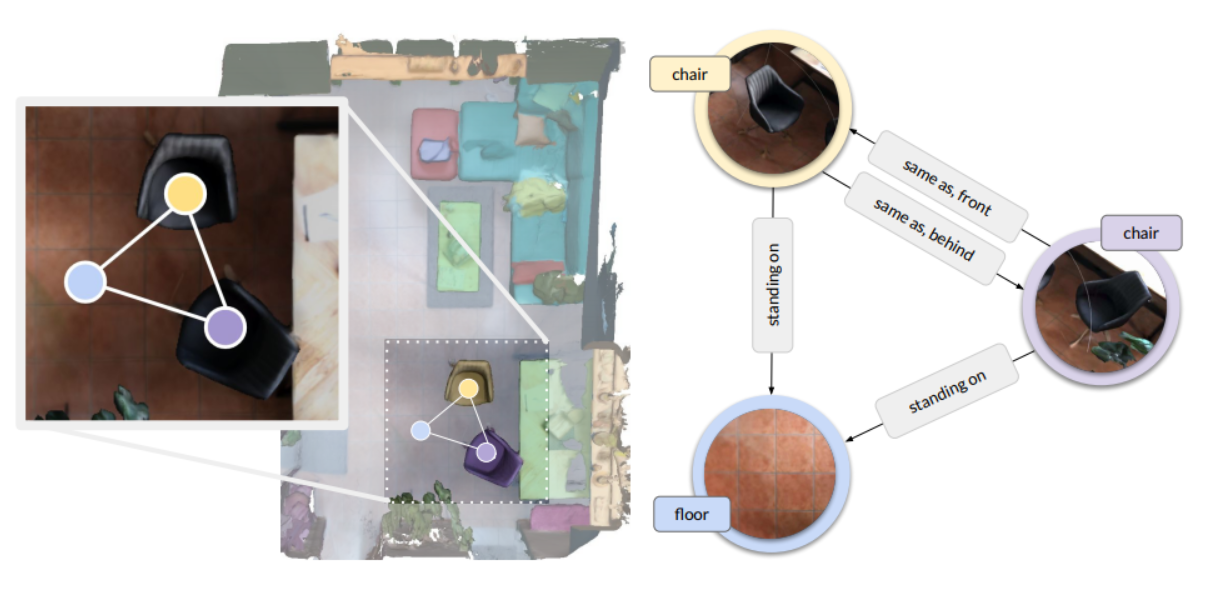
3. Learning 3D Semantic Scene Graphs
Learning 3D Semantic Scene Graphs from 3D Indoor Reconstructions
google搞得。提出了3DSSG数据集,系统介绍了一个三维场景图中应该有的东西。自己也提出了一个网络,从点云中得到三维场景图。这篇不错。
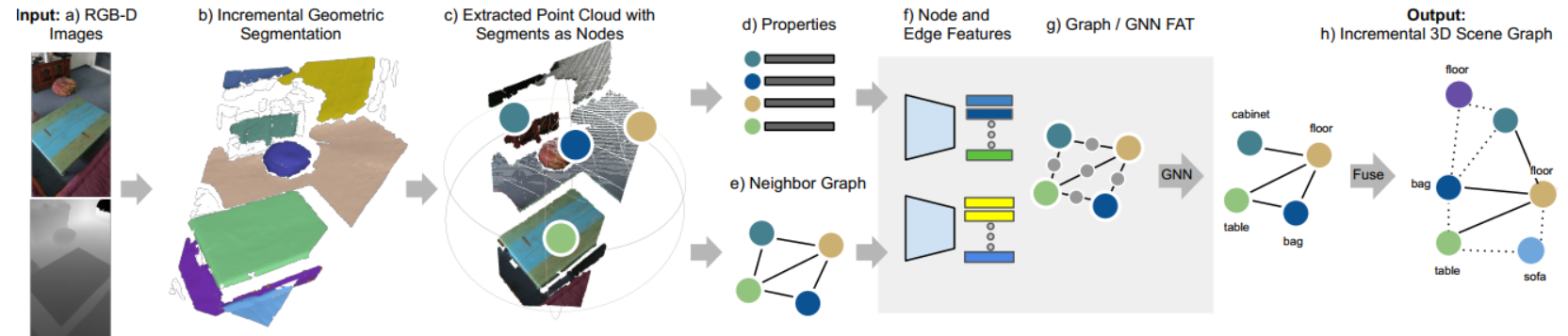
4. SceneGraphFusion
SceneGraphFusion: Incremental 3D Scene Graph Prediction from RGB-D Sequences
应该是学妹复现的这篇。输入图像和深度图像,点云分割之后提取节点和边。也挺不错的。
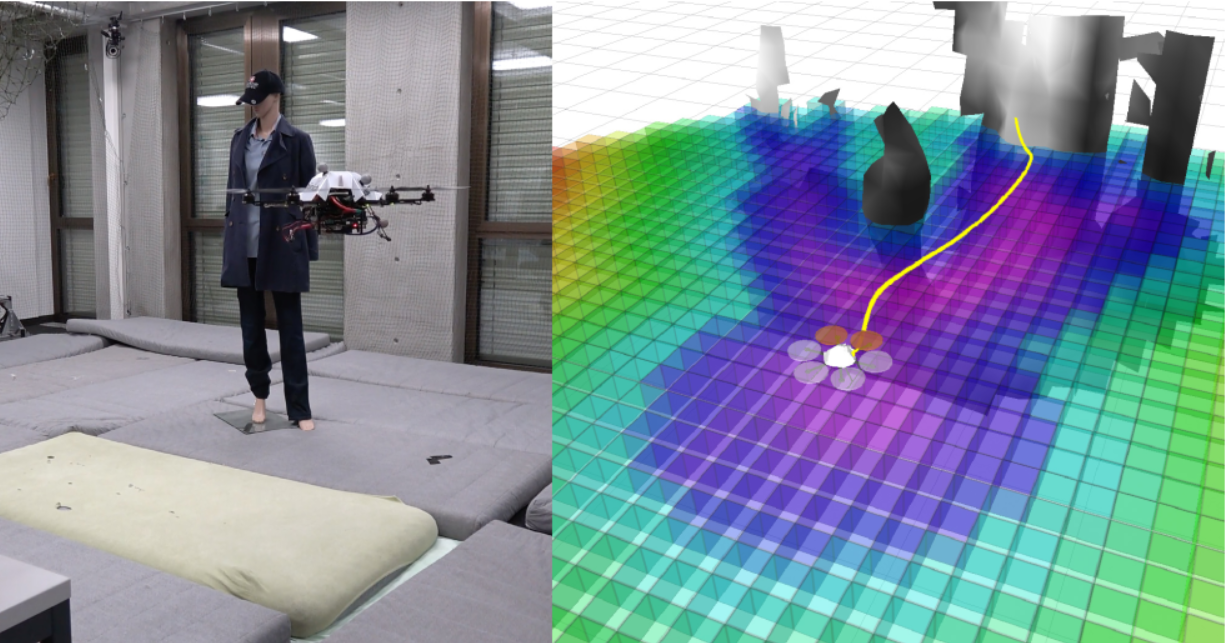
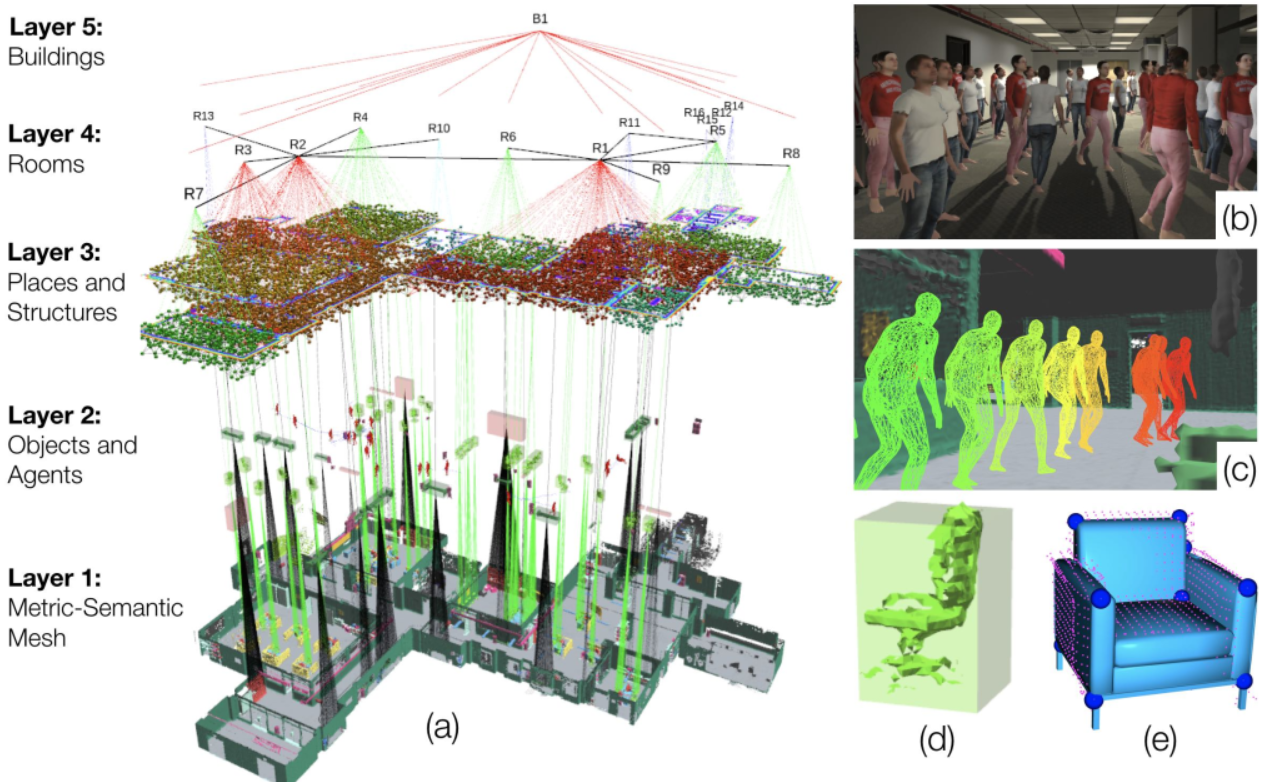
5. 3D Dynamic Scene Graphs (Kimera)
3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans
MIT的大作,期刊是IJRR。kimera基础上做的,除了第一层是实时构建,后面都是完成建图之后自动搞出来的。构建了一个贼复杂的场景图,每一层之间耦合。工作量很大:构建可用于机器人导航的空闲空间拓扑图,人和机器人地时空图,分割房间,,,
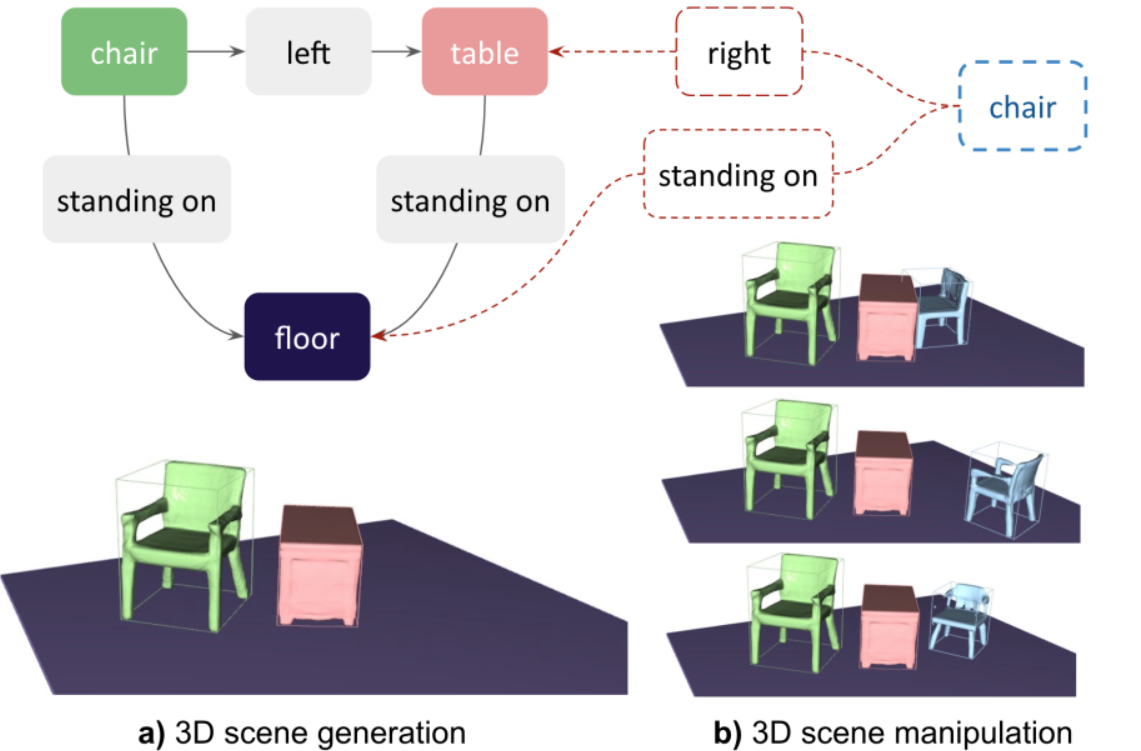
6. Graph-to-3D
Graph-to-3D: End-to-End Generation and Manipulation of 3D Scenes Using Scene Graphs
这个算是反过来的,从场景图构造环境。端到端的方式,还允许场景修改,可能这就是元宇宙吧。
先进动态建图算法
1. TSDF-based Change Detection
TSDF-based Change Detection for Consistent Long-Term Dense Reconstruction and Dynamic Object Discovery
也是ETH的(ETH比较喜欢TSDF呀),实现静态地图构建和动态物体获取。建图过程主要是更新静态地图,完成建图之后可以检测动态物体。当然建图过程中也需要先检测动态物体。之前动态物体检测,是在点云、surfel或地图上进行的,不能区分未被探索的部分和空闲区域,TSDF可以完成。



















 1930
1930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









