







机器人建图算法1、基础的地图结构和建图类型
前言
路径规划先得有地图,因此建图是必不可少的。
常用的地图有2D和3D地图,2D地图计算量小,适用于快速验证规划算法;而对真实世界的模拟则需要3D地图,能够表征更多信息,但计算量也较大。2D地图中的实时稠密算法放到3D中运行可能就很慢了。
2D地图
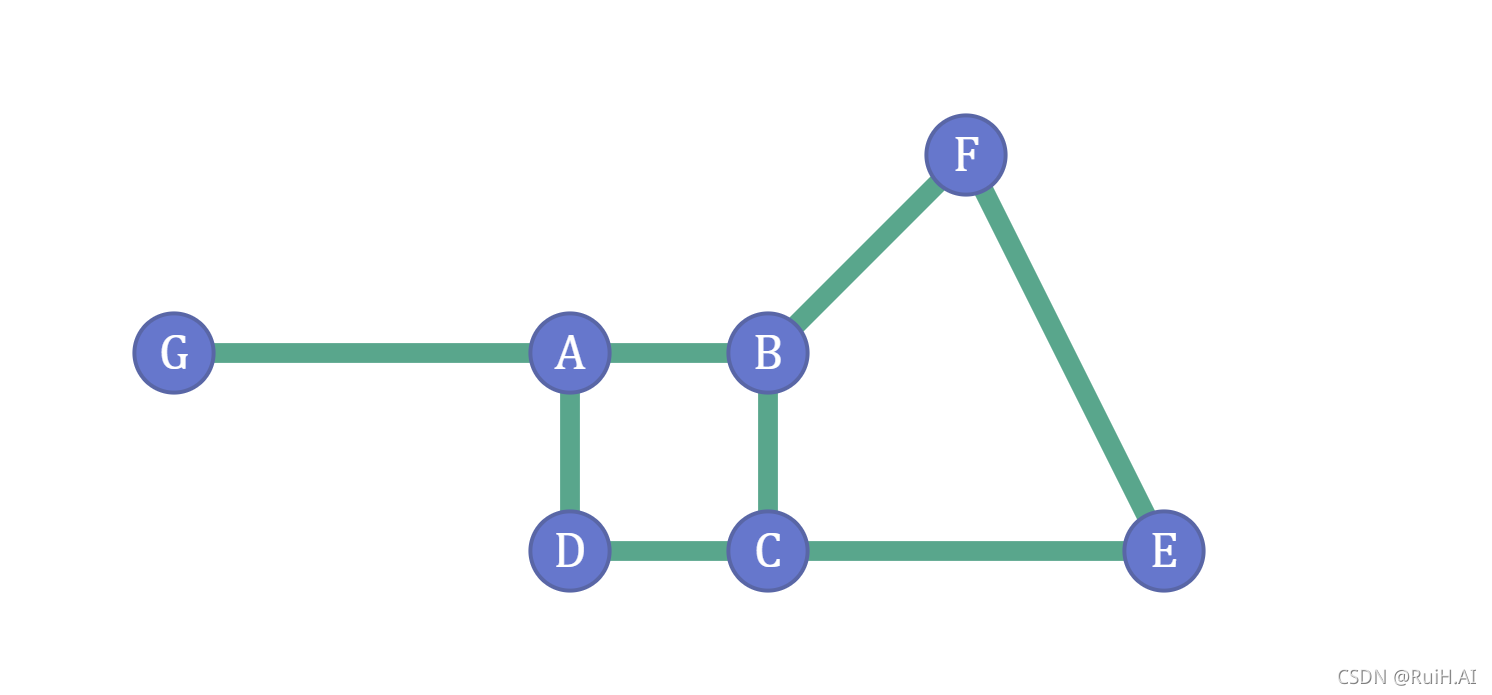
拓扑地图Graph
与图论紧密相关的一种地图,由节点和边组成(可带权),适用于表征图中各个位置之间的关系。
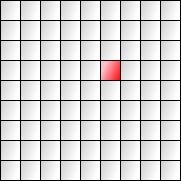
栅格地图Grids
栅格地图,或者叫网格地图,由相互连接的正方形网格组成的地图,A*、Dijkstra等grid search based算法使用的地图,通过grid坐标确定位置
多边形地图
通过多边形表征障碍物,将多边形顶点与起终点按规则相互连接得到的图。适用于进行简单的避障规划。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 636
636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









