






第零步、安装cartographer
第一步、连接激光雷达,找客服要驱动安装即可
第二步、修改urdf文件,我个人定义的非常简单
第三步、修改lua文件,即cartographer_ros使用的配置文件
第四步、修改launch文件
第五步、先启动雷达,再启动cartographer,在rviz中显示出来实时建的图
最后给出我的配置文件,
lua文件
-- Copyright 2016 The Cartographer Authors
--
-- Licensed under the Apache License, Version 2.0 (the "License");
-- you may not use this file except in compliance with the License.
-- You may obtain a copy of the License at
--
-- http://www.apache.org/licenses/LICENSE-2.0
--
-- Unless required by applicable law or agreed to in writing, software
-- distributed under the License is distributed on an "AS IS" BASIS,
-- WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-- See the License for the specific language governing permissions and
-- limitations under the License.
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "laser_link",
published_frame = "laser_link",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 0.5,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.6
TRAJECTORY_BUILDER_2D.max_range = 30.
TRAJECTORY_BUILDER_2D.min_z = -0.3
TRAJECTORY_BUILDER_2D.max_z = 1.5
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 5.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
POSE_GRAPH.optimize_every_n_nodes = 35 --houjia 35
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e3
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e3
--POSE_GRAPH.optimization_problem.huber_scale = 1e2
--POSE_GRAPH.constraint_builder.min_score = 0.65
return options
laucn文件
<!--
Copyright 2016 The Cartographer Authors
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
<launch>
<param name="/use_sim_time" value="false" />
<!-- <node pkg="tf" type="static_transform_publisher" name="base_laser_broadcaster" args="0 0 0 0 0 0 laserbase_footprint /base_footprint 20" /> -->
<param name="robot_description"
textfile="$(find cartographer_ros)/urdf/my_demo.urdf" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/lslidar.rviz" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" />
<node name="joint_state_publisher" pkg="joint_state_publisher"
type="joint_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory
$(find cartographer_ros)/configuration_files
-configuration_basename my_demo.lua"
output="screen">
<remap from="/scan" to="/scan" />
<remap from="/points2" to="/lslidar_point_cloud" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>
urdf文件
<!--
Copyright 2016 The Cartographer Authors
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
-->
<robot name="cartographer_backpack_3d">
<material name="orange">
<color rgba="1.0 0.5 0.2 1" />
</material>
<material name="gray">
<color rgba="0.2 0.2 0.2 1" />
</material>
<link name="laser">
<visual>
<origin xyz="0 0 0"/>
<geometry>
<cylinder length="0.07" radius="0.05" />
</geometry>
<material name="gray" />
</visual>
</link>
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<material name="gray" />
</visual>
</link>
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser" />
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
</robot>
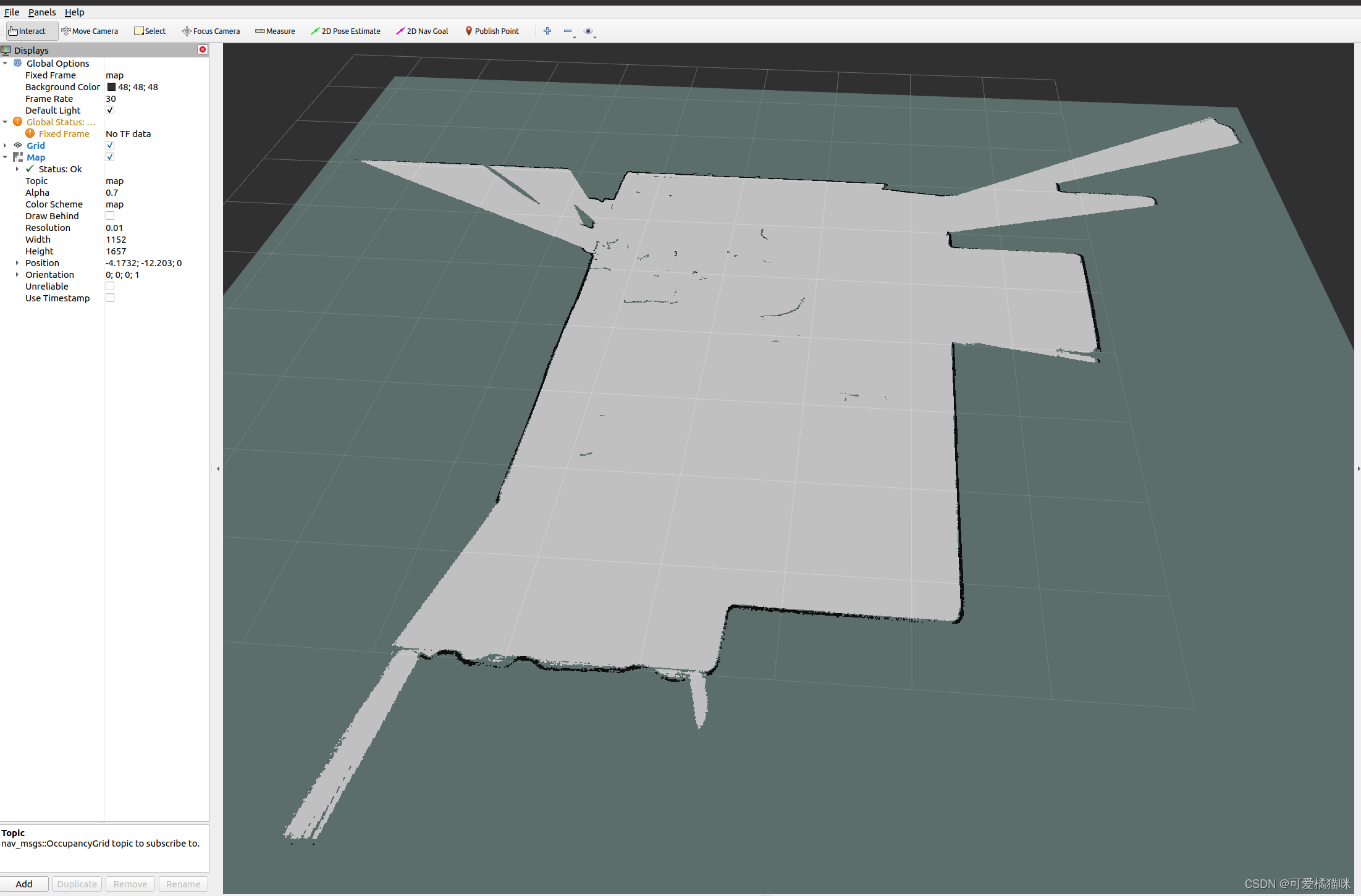
建图效果:















 740
740











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









