







参考视频:
33.ROS 的标准消息包 std_msgs_哔哩哔哩_bilibili
34. ROS 中的几何包 geometry_msgs 和 传感器包 sensor_msgs_哔哩哔哩_bilibili
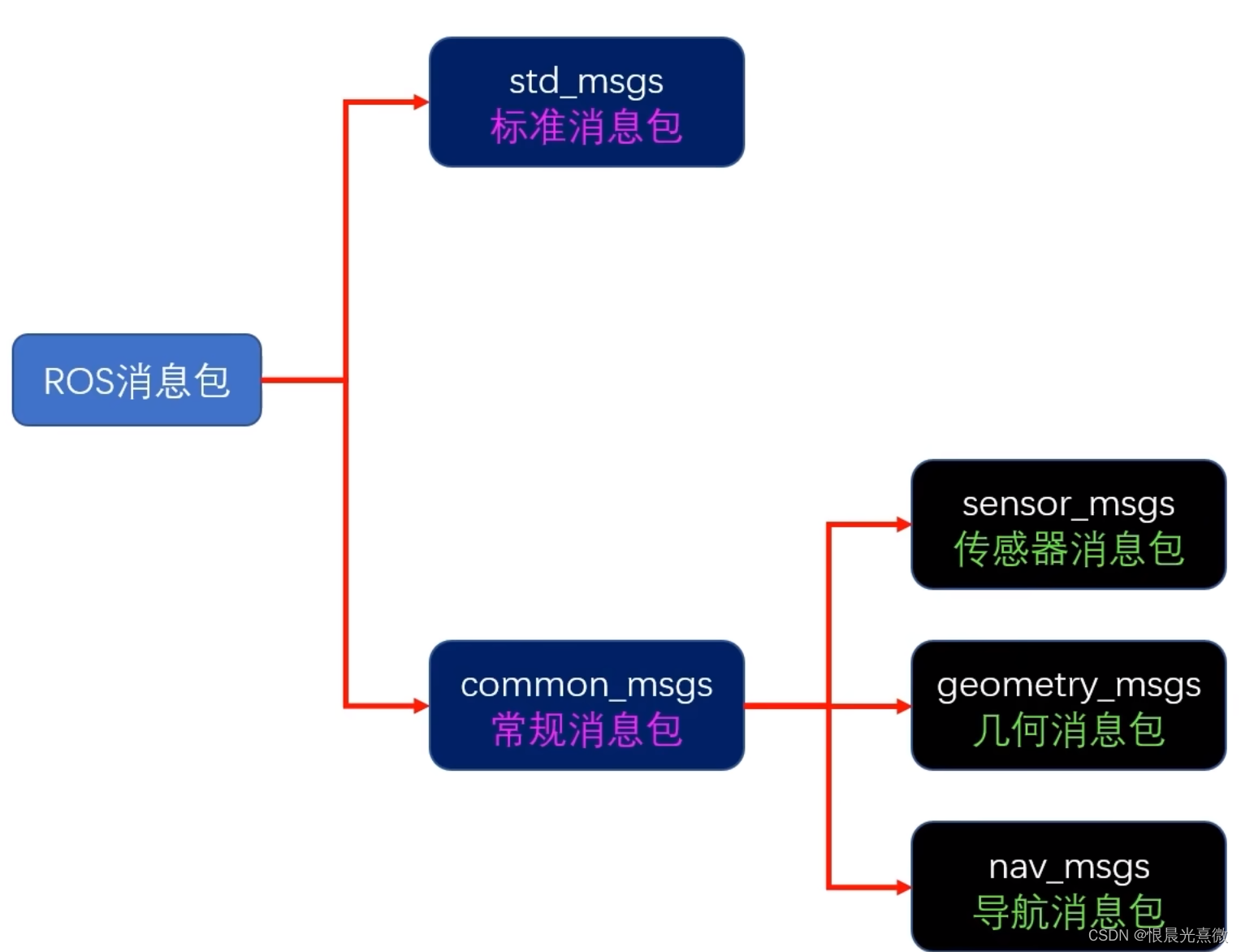
- 标准消息包:std_msgs
- 常用消息包:common_msgs
- 导航消息包:nav_msgs
- 几何消息包:geometry_msgs
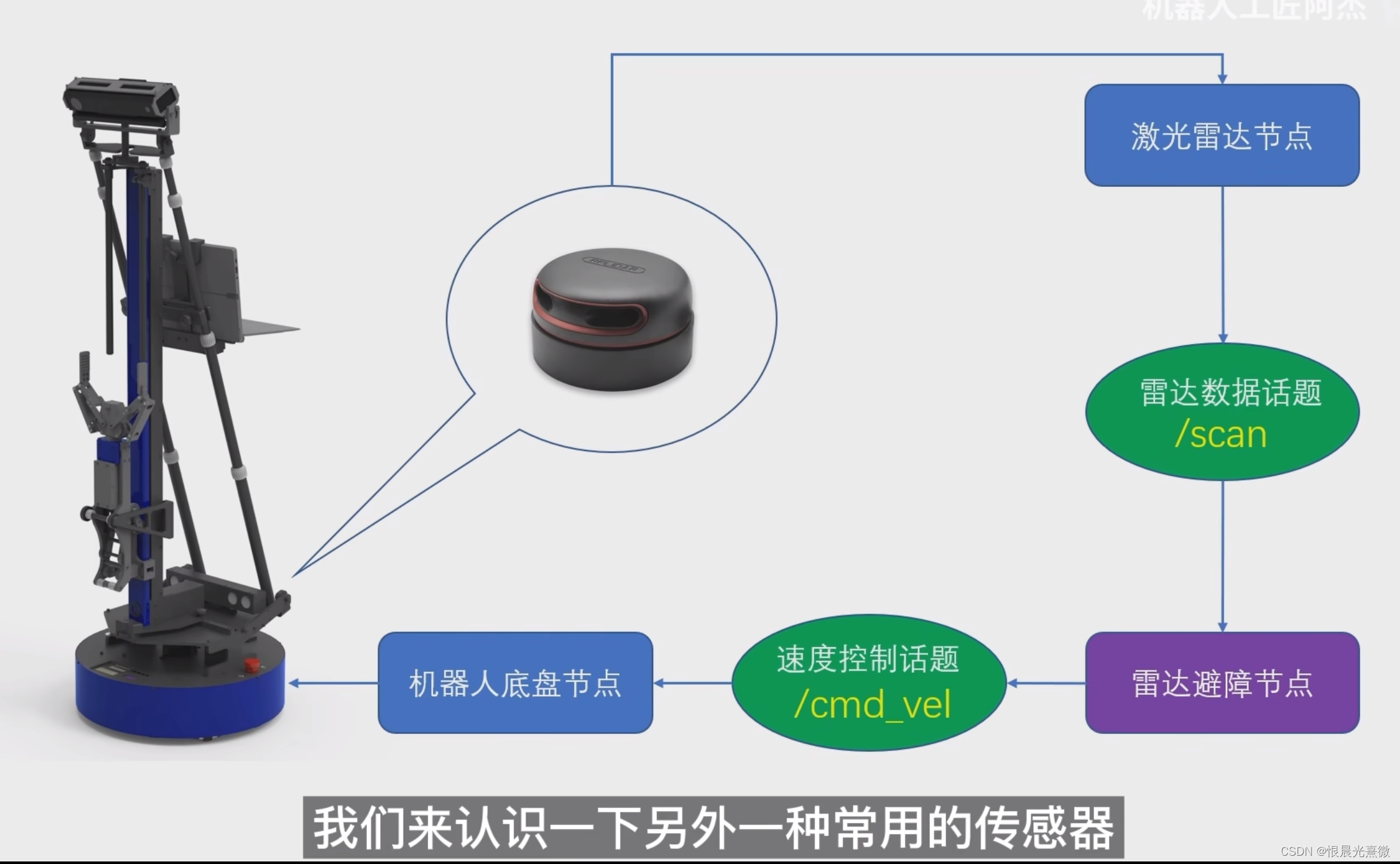
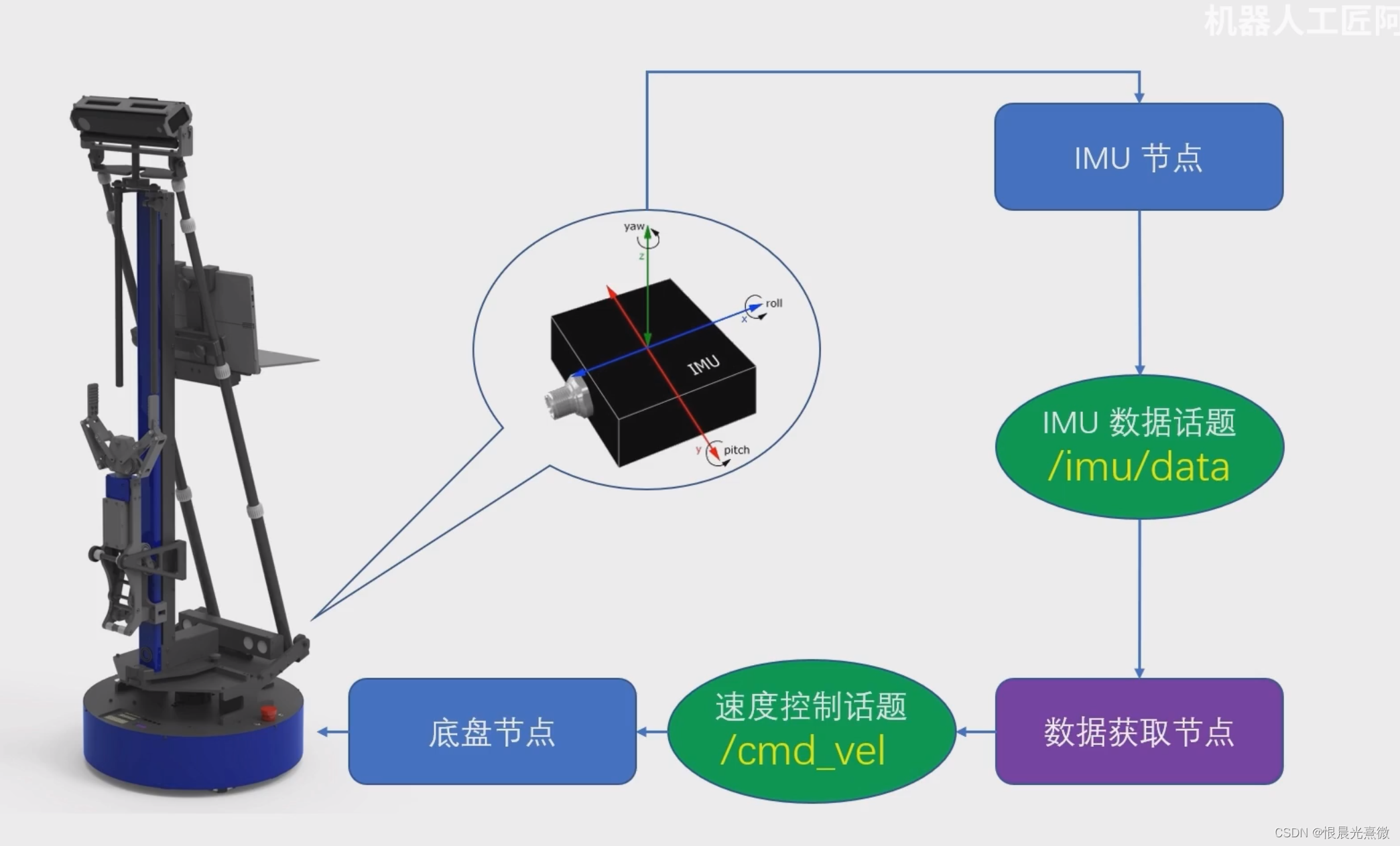
- 传感器消息包:sensor_msgs
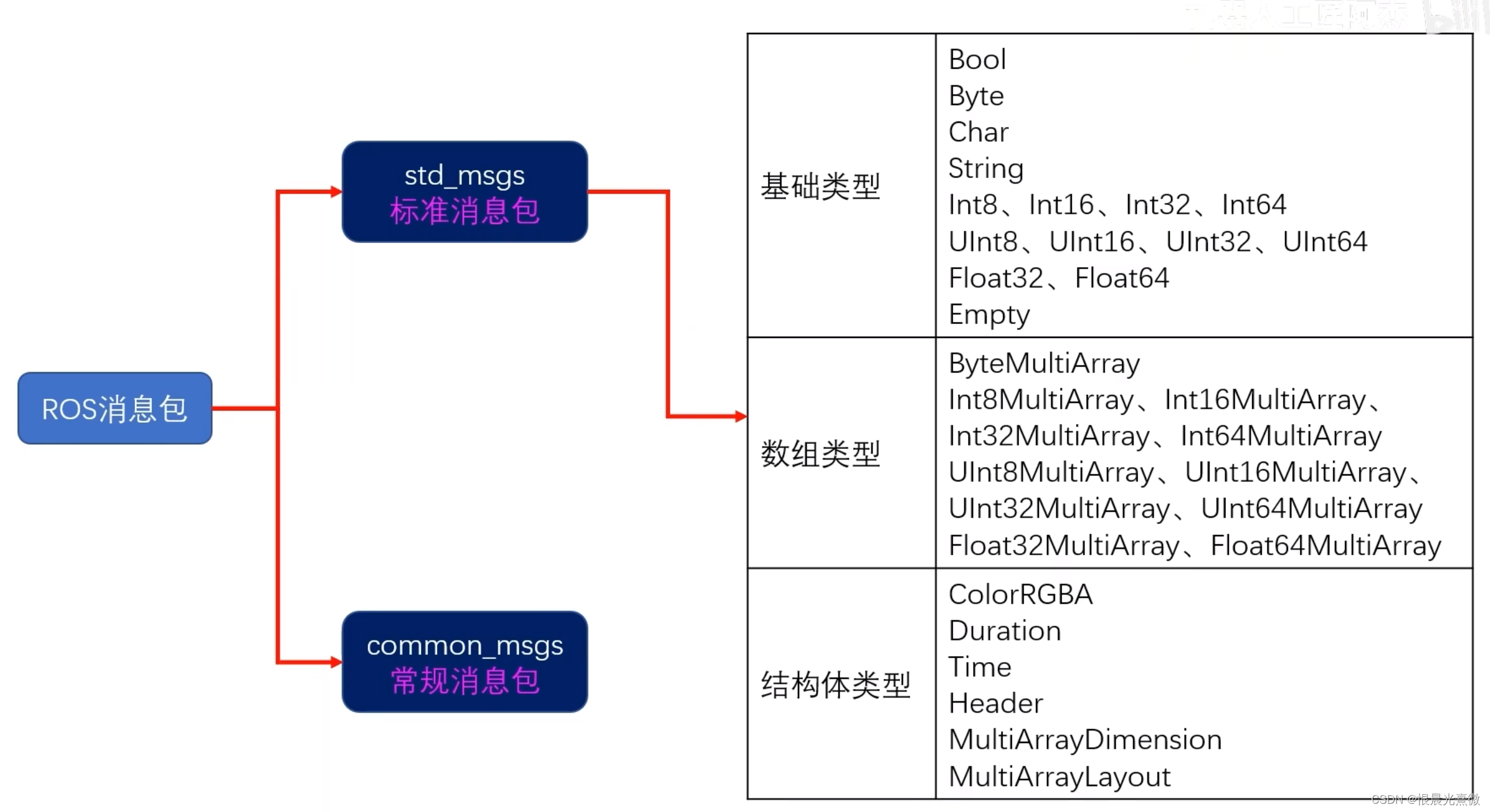
一、标准消息包
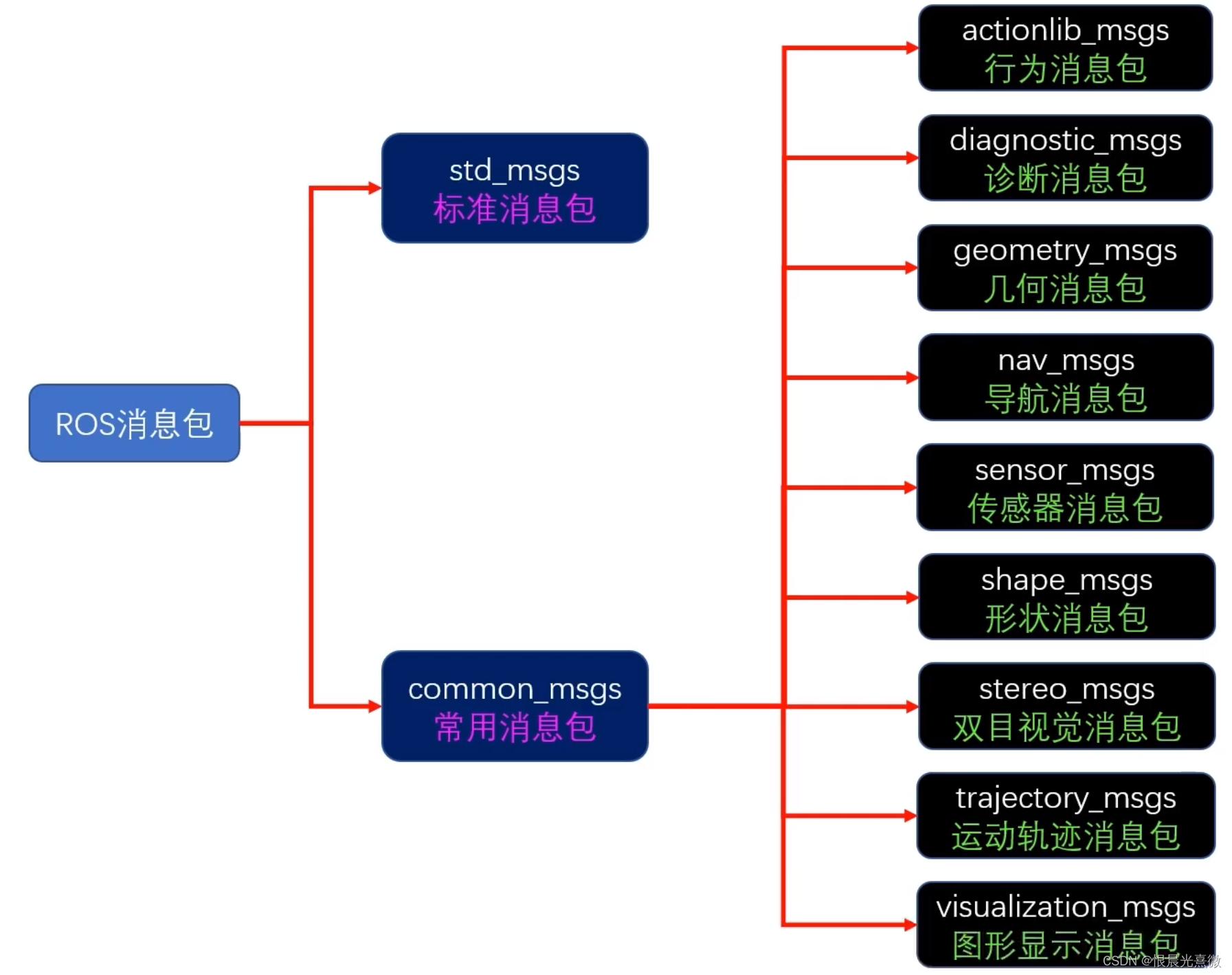
二、常规消息包
三、几何消息包
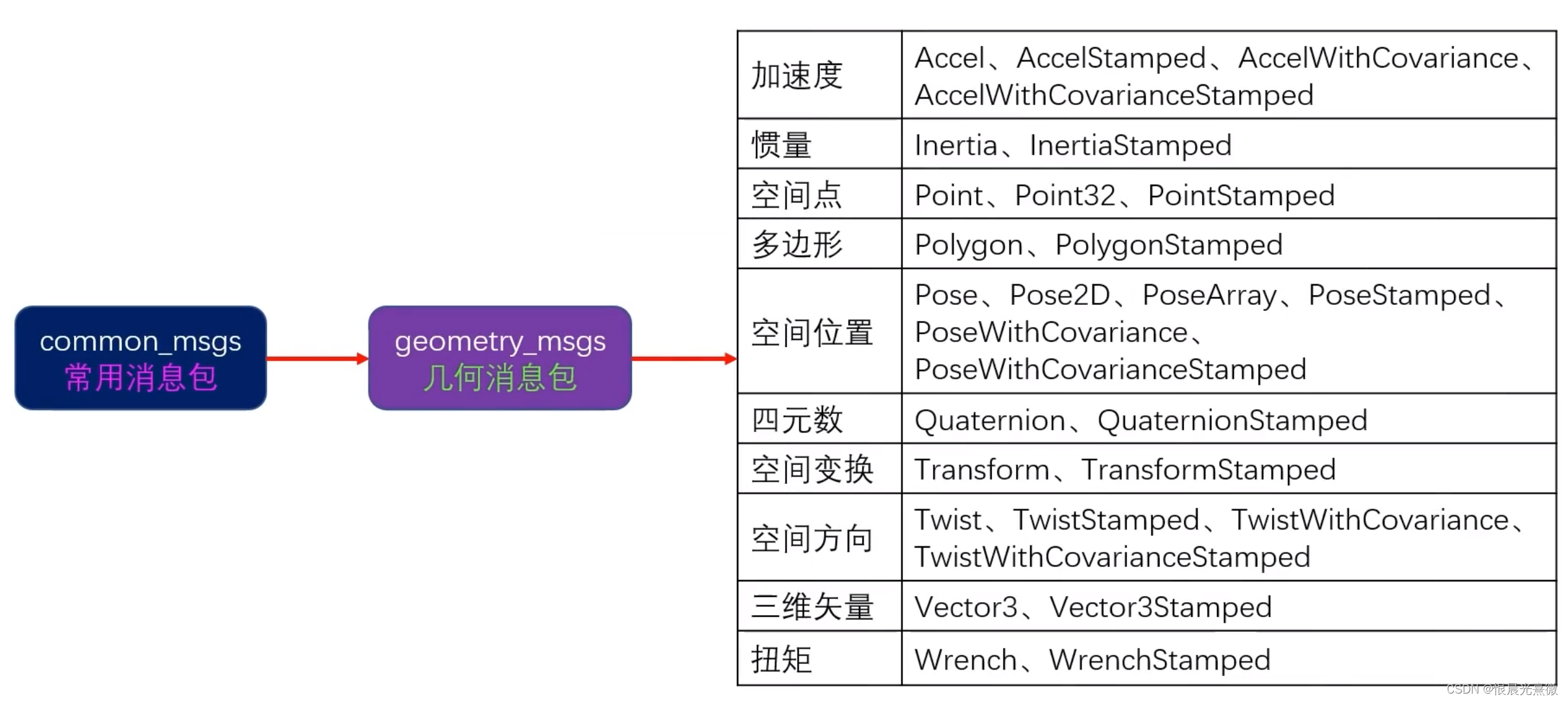
- 其中的一些“消息包类型”的名称中带了关键词“stamped”,这些消息包都是多了一个Header,也就是多了时间和坐标系ID,将空间量和时间量进行了绑定,在一些预测/滤波算法里会用得到;
四、传感器消息包

补充内容:
- 使用激光雷达控制机器人底盘
- 使用imu传感器获得机器人姿态,控制底盘
- 发布栅格地图数据(并在Rviz中显示栅格地图)

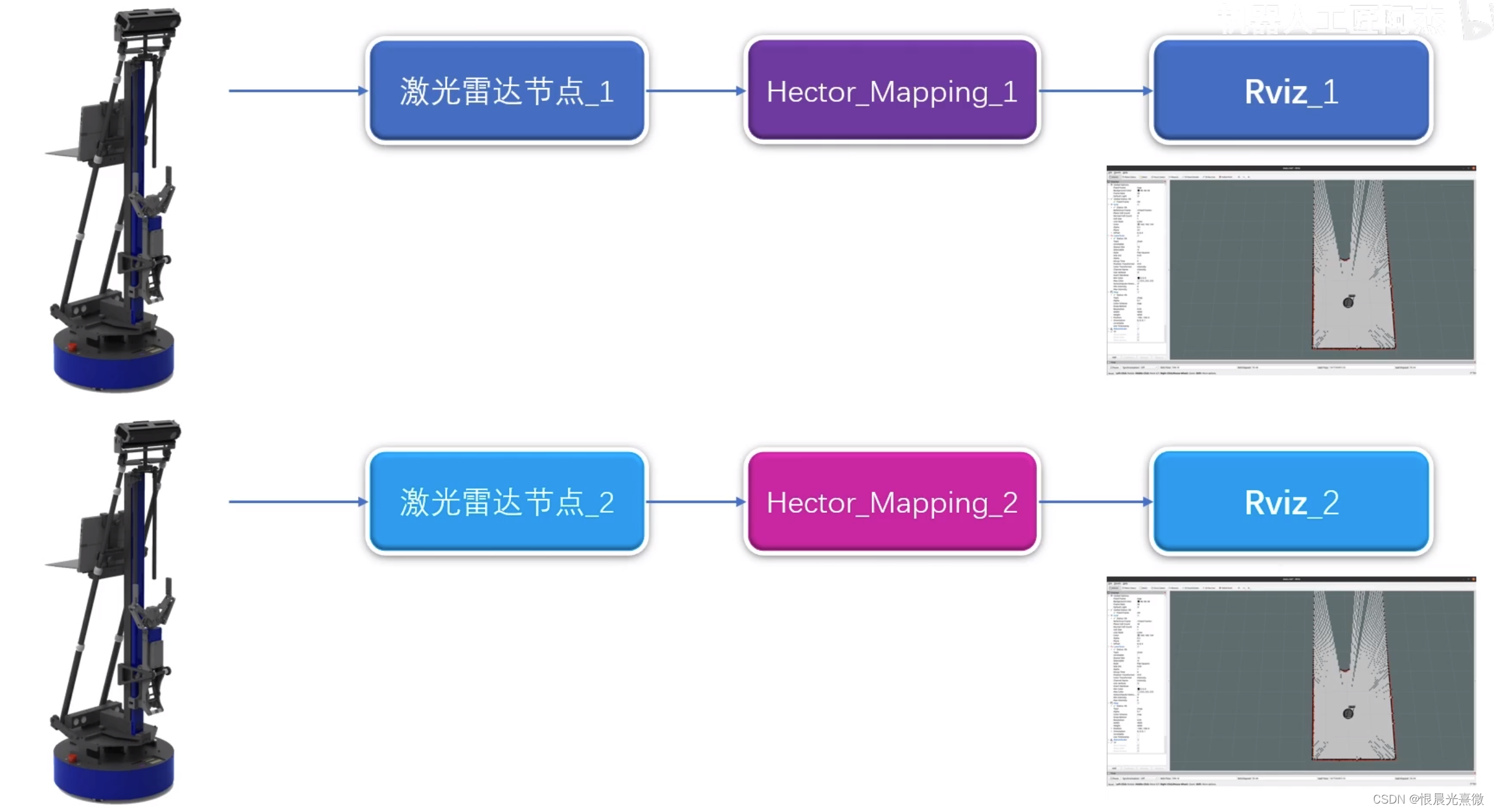
- 激光SLAM建图

- 两台机器人同时建图
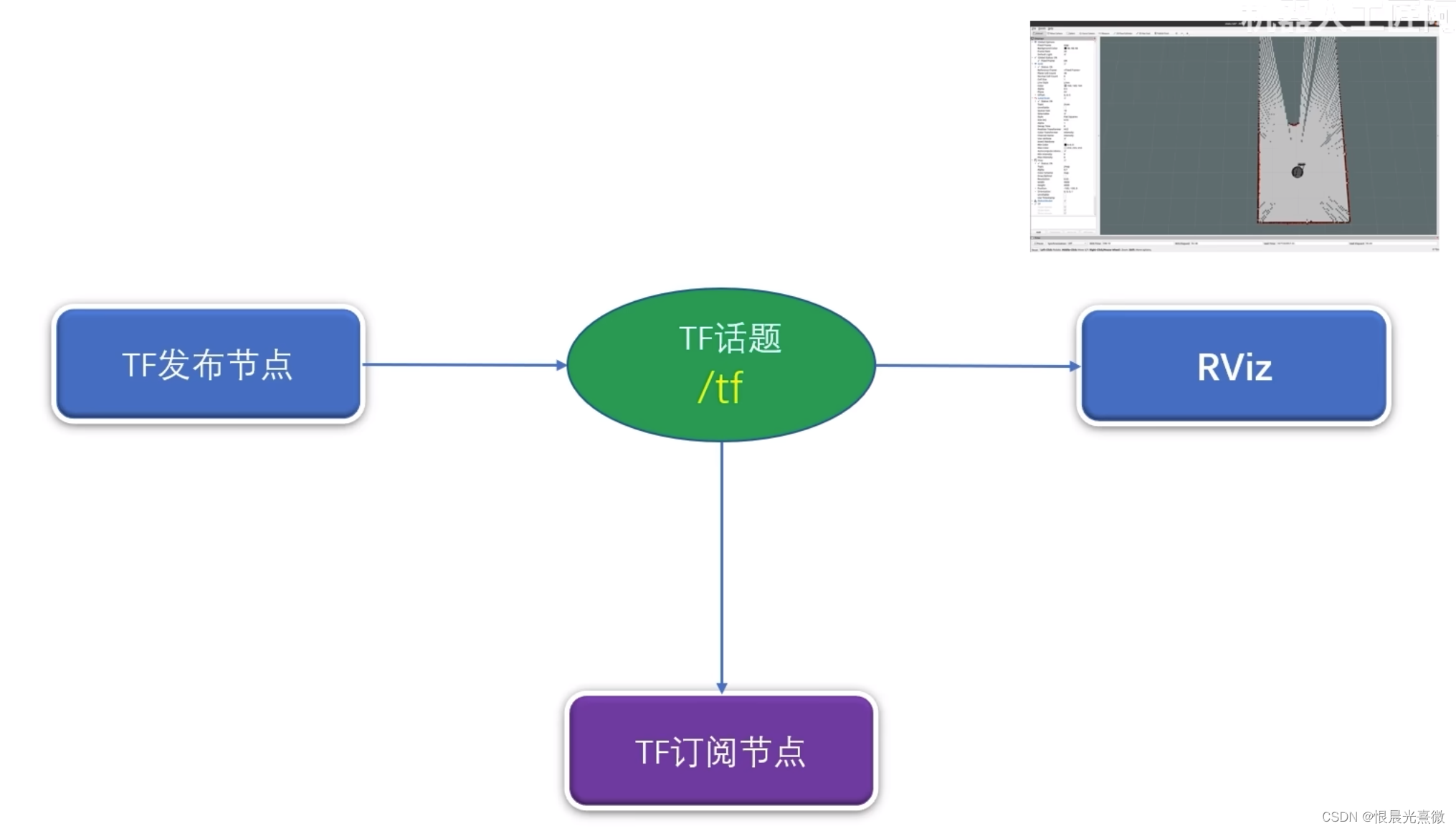
- 使用TF工具进行“定位”















 203
203











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









