







Ubuntu学习笔记6-ESP32接收并处理cmd_vel话题
前言
前面配置好了Arduino环境中的ros库,但是经过各种尝试总结出以下结论:
rosserial_Arduino的串口通讯只支持Arduino系列板子(ESP8266没有尝试),当将串口通讯的代码烧录至ESP32后,每次通讯时都会报错:
Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
或者是另外一个M开头的报错,究其本质,感觉就是该库的串口对于ESP系列的不支持,由于本人技术有限,无法进行源码的修改及优化(当然也有可能是我菜没弄好,有懂行的大佬欢迎指点)
因此,根据网上的资料,本人尝试了另外一种通讯方式,通过ROS官方封装的TCP协议,将ESP板子接入该服务器中,即可通过局域网进行无线通讯,该方案有好也有坏。
好处:无需连接,可以直接按照ROS的节点方式进行编写ESP32端代码
缺点:不稳定,有时候连接异常,且数据通讯质量无法保证(估计受网络带宽等影响)
因此,随后还是放弃了这种方式,选择了直接通过串口库进行开发,本来想在Qt上开发ROS利用Qt的串口库进行通讯,但是冲浪发现ROS也有一个serial
库,类似封装Linux的串口库的产物,因此决定采用这种方式进行通讯。
ESP32端测试代码
对于ESP32而言,只需要简单的串口接收然后通过另外一个串口输出即可验证,主要的处理还是在上位机ROS端。
ESP32的串口0(该串口用于下载,使用了USB线就不能再用杜邦线接出)
TXD:GPIO1
RXD:GPIO3
ESP32的串口2
TXD:GPIO17
RXD:GPIO16
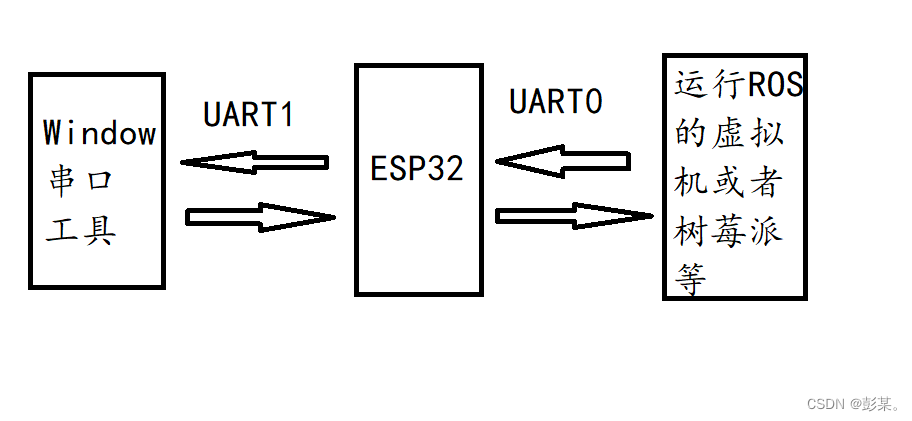
连接方式如上。
ESP32代码如下:
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
Serial2.begin(115200);
}
void loop() {
// put your main code here, to run repeatedly:
if(Serial.available())
{
String buf = Serial.readString();
Serial2.println(buf);
}
}
ROS端代码
ROS端需要订阅键盘节点话题(/cmd_vel),并将接收到的线速度及角速度转化为转速,然后通过串口下发给ESP32.
#include <ros/ros.h>
#include <serial/serial.h>
#include <std_msgs/String.h>
#include <std_msgs/Empty.h>
#include <geometry_msgs/Twist.h>
#include <iostream>
#include <sstream>
using namespace std;
//定义串口对象
serial::Serial ser;
//cmd_vel回调函数,用于接收键盘话题下发ESP32
void com_vel_callback(const geometry_msgs::Twist::ConstPtr& msg){
int leftSpeed = (msg->linear.x - msg->angular.z * 0.27 / 2) / 3.14 / 0.085 *100;
int rightSpeed = (msg->linear.x + msg->angular.z *0.27 / 2) / 3.14 / 0.085 *100;
std_msgs::String buf;
std::stringstream ss;
ss<<leftSpeed<<","<<rightSpeed;
buf.data = ss.str();
ser.write(buf.data);
}
int rosSerial_init(string name,int baud)
{
try
{
ser.setPort(name);
ser.setBaudrate(baud);
serial::Timeout to = serial::Timeout::simpleTimeout(1000);
ser.setTimeout(to);
ser.open();
}
catch (serial::IOException& e)
{
ROS_ERROR_STREAM("Unable to open port ");
return -1;
}
if(ser.isOpen()){
ROS_INFO_STREAM("Serial Port initialized");
}else{
return -1;
}
}
int main (int argc, char** argv){
ros::init(argc, argv, "serial_example_node");
ros::NodeHandle nh;
ros::Subscriber write_sub = nh.subscribe<geometry_msgs::Twist>("/cmd_vel", 1000, com_vel_callback);
ros::Publisher read_pub = nh.advertise<std_msgs::String>("read", 1000);
if(rosSerial_init("/dev/ttyUSB0",115200) == -1)
return -1;
ros::Rate loop_rate(5);
while(ros::ok()){
ros::spinOnce();
if(ser.available()){
ROS_INFO_STREAM("Reading from serial port");
std_msgs::String result;
result.data = ser.read(ser.available());
ROS_INFO_STREAM("Read: " << result.data);
read_pub.publish(result);
}
loop_rate.sleep();
}
}
关于线速度及角速度转化为转速的知识自行冲浪补习,此处提供下位机的数据处理方法,以供参考:
target[0] = 0;target[1] = 0;
String buf = str.data;
char com[20];
buf.toCharArray(com,10);
int m = 0;
for(int i = 0;i<20;i++)
{
if(com[i] == ',')
{
if(flag_1 == 1)
target[m] *= -1;
flag_1 = 0;
m++;
}
else if(com[i] == '\r'||com[i] == '\n'||com[i] == '\0')
break;
else
{
if(com[i] != '-')
target[m] = target[m]*10+(com[i]-'0');
else
flag_1 = 1;
}
}
if(flag_1 == 1)
{
target[1] *= -1;
flag_1 = 0;
}
target[0] /= 100;target[1] /= 100;
if(target[0] >= 0) Lpid.SetOutputLimits(500, 1000);
else Lpid.SetOutputLimits(-1000, -500);
if(target[1] >= 0) Rpid.SetOutputLimits(500, 1000);
else Rpid.SetOutputLimits(-1000, -500);
Serial.print(target[0]);
Serial.print(',');
Serial.println(target[1]);
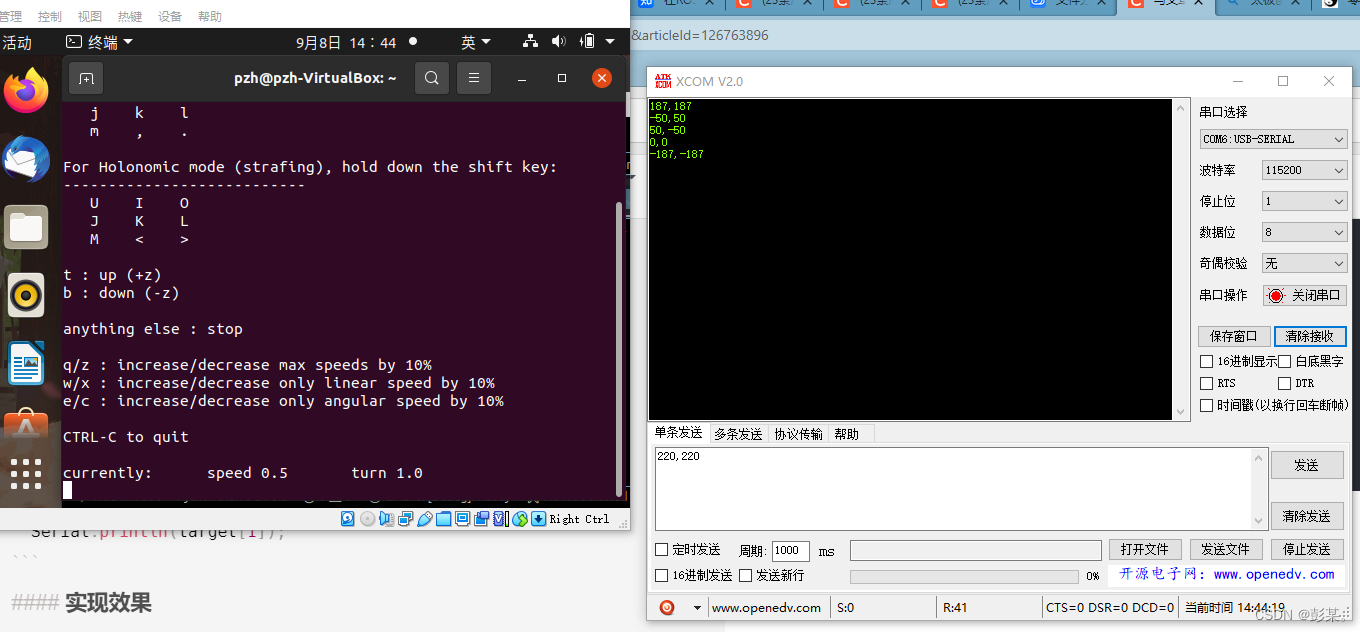
实现效果
PC的串口助手成功接收上位机下发的转速信息
后记
尽管这种方法能够接收ROS下发的控制信息,但是ESP32端的odam及里程计信息等如何上传还需要研究一下,希望一切顺利。















 7175
7175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









