







1、换源
换一个国内源,下载速度会更快,阿里云、清华源、中科大源都行。
2、设置ros的下载源
2.1)由于使用国外源下载速度很慢,将ros下载源设置为中科大源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

2.2)设置秘钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

2.3) 更新源:
sudo apt-get updata
3、安装ros
3.1)下载ros桌面完全版:
sudo apt-get install ros-melodic-desktop-full
经过极漫长的等待,终于装好ros了。
3.2) 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
3.3) 下载其他组件
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
3.4) rosdep 初始化
方法一:使用rosdep
sudo rosdep init
rosdep update
运气好的话能够通过,运气差可能就要折腾很久,推荐鱼香大佬写的脚本,能够让rosdep不在难更新
方法二:鱼香ros rosdepc
sudo apt install python-pip
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
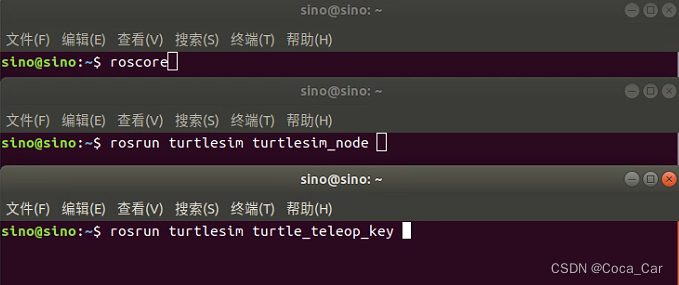
4、测试ros
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
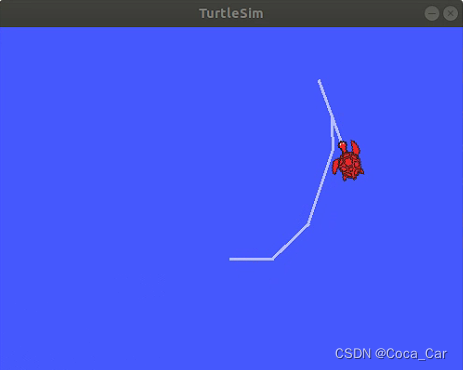
至此安装成功!














 166
166











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









