







 本文详细介绍了如何在台达CANopen基本模式下调整ASDA-A2伺服驱动器的速度模式。通过设置参数如CANopen模式、节点ID、波特率和同步功能,然后使用CANPro协议分析平台软件进行调试,包括设置工作模式、加速度、减速度,以及启动、停止电机等操作。
本文详细介绍了如何在台达CANopen基本模式下调整ASDA-A2伺服驱动器的速度模式。通过设置参数如CANopen模式、节点ID、波特率和同步功能,然后使用CANPro协议分析平台软件进行调试,包括设置工作模式、加速度、减速度,以及启动、停止电机等操作。
#Step1:
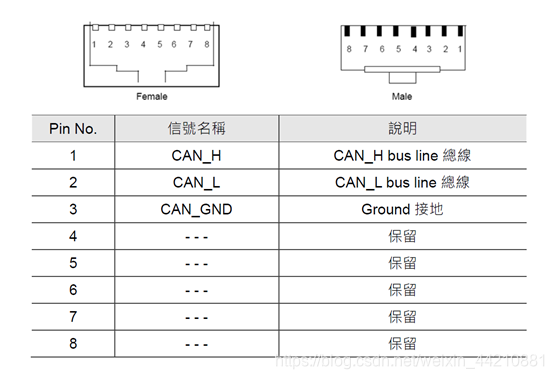
硬件连接
#Step2:
使用者可依下列步骤连接CANopen 上位机与ASDA-A2 伺服驱动器:
-
设定CANopen 模式:将参数P1-01 设为0x0Bh 或0x0Ch。0x0Bh 的设定为CANopen 基本模式,非完整的CANopen 通讯协定,用于与台达控制器连接时使用。0x0Ch 为标准CANopen 通讯协定,建议使用此模式进行CANopen 运动控制。在此选择0x0Bh 的CANopen 基本模式作为参数。
-
设定节点ID,将P3-00 范围设为01h ~ 7Fh。在此选择将P3-00设置为01,即伺服器节点为01。
-
将参数P3-01 设为0403h,设定波特率1 Mbps (0: 125 Kbps; 1: 250 Kbps; 2: 500 Kbps;
3: 750 Kbps; 4:1 Mbps) 。 -
设定同步功能:将参数P3-09 设定为0x5055h。
#Step3:
在调试的时候,先给伺服上电,驱动器与伺服电机连接,驱动器的CAN端与USBCAN-II Pro的CAN1相连。 -
打开CANPro协议分析平台软件,点击协议管理,设置为CANopen1.11.

-
点击启动,选择USBCA
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1118
1118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









