




 本文通过二连杆系统实例,详细讲解了机器人动力学参数的辨识过程,包括牛顿欧拉动力学建模、线性化、最小参数集提取和最小二乘法应用。尽管未进行激励轨迹优化,但仿真结果展示了辨识的有效性和精度。参考书籍为《机器人动力学与控制》。
本文通过二连杆系统实例,详细讲解了机器人动力学参数的辨识过程,包括牛顿欧拉动力学建模、线性化、最小参数集提取和最小二乘法应用。尽管未进行激励轨迹优化,但仿真结果展示了辨识的有效性和精度。参考书籍为《机器人动力学与控制》。
本篇博文以二连杆系统为例子,讲解机器人的动力学参数辨识,并进行仿真,由于本篇主要是进行仿真因此没有实验数据处理的过程。
本篇博文主要参考了霍伟的《机器人动力学与控制》。
机器人动力学参数主要步骤:
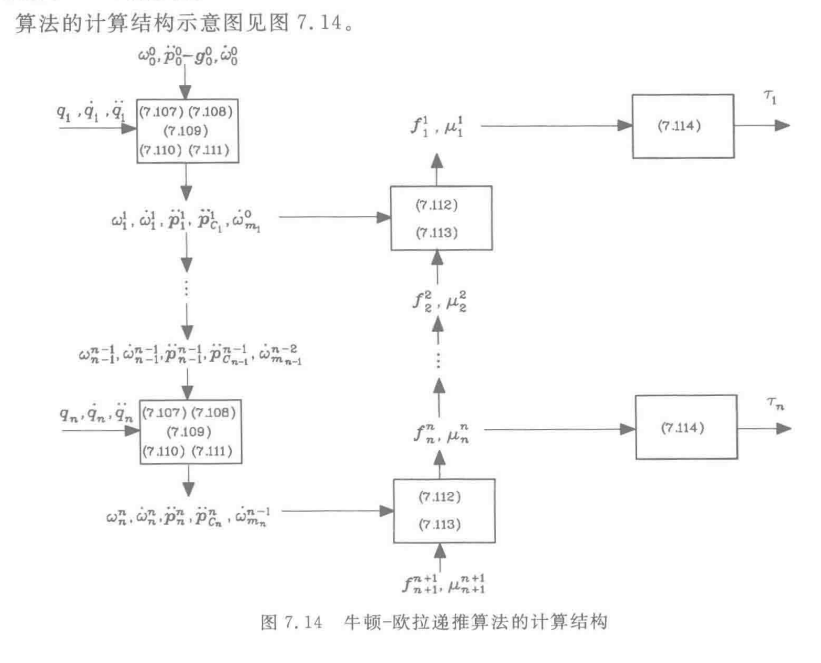
- 牛顿欧拉动力学建模
- 向外迭代线性化
- 提取最小参数集
- 激励轨迹设计
- 最小二乘法求出动力学参数
动力学建模的方法不用赘述,请参见《机器人学建模、规划与控制》
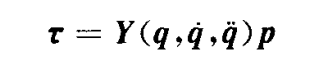
其中在向外迭代的过程中,对标黄部分进行线性化处理:

于是就可以得到动力学方程的线性化的形式。
这个时候并不能直接使用最小二乘法,因为Y矩阵不满秩,并且如果使用SVD等方式进行伪逆解处理时,由于Y矩阵的条件数较大,Y矩阵是一个病态矩阵,这就导致伪逆计算的结果十分不精确,并且没有实际的物理意义,比如说将质量计算为负值等等的。因此需要对观测矩阵Y和惯量参数矩阵进行修改。
这就涉及到了最小参数集的提取,最小参数集的提取方法见《霍伟》P97页。
对于二连杆系统,其最小参数集为:

Y矩阵和各个关节的位置、速度和加速度有关。因此激励轨迹将直接影响到Y.'*Y求逆时候的可信度,因此需要优化激
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3648
3648

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









