







什么是激光雷达校准?
对于诸如自动驾驶、机器人技术、导航系统和三维场景重建等应用,通常使用激光雷达和摄像机传感器来捕获同一场景的数据。 为了准确地解释场景中的物体,需要将激光雷达和摄像机的输出信号融合在一起。 激光雷达摄像机标定估计了一个刚性变换矩阵,该矩阵建立了三维激光雷达平面上的点与图像平面上像素之间的对应关系。 激光雷达摄像机标定分为两部分:
----内在参数校准
----激光雷达与相机外部参数校准
激光雷达传感器的固有参数是由制造商事先校准的

激光雷达与相机外部校准
激光雷达和摄像机传感器的外部标定通常使用标定对象,如在捕获场景中使用棋盘图案的平面板。 在每个传感器采集的数据中检测标定对象的角点,并建立它们之间的点对应关系。 通过外部标定和相机内部参数,可以计算出三维激光雷达点对应的图像平面坐标。

外部标定是将点从三维激光雷达坐标系映射到三维摄像机坐标系的刚性变换。 外部参数包括旋转R和平移t。

你可以通过使用estimateLidarCameraTransform函数来估计刚性变换矩阵。
然后,根据三维激光雷达点和外部参数计算二维图像平面坐标。

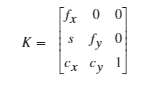
K是相机的本征矩阵,由本征参数定义:焦距、光学中心(也称为主点)、倾斜系数。

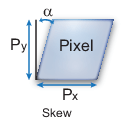
- 像素倾斜定义为:
你可以使用cameraIntrinsics函数来估计相机的内在参数。 使用估计的外部校准和相机的内部参数,您可以将激光雷达点投射到图像上或融合相机和激光雷达传感器输出。 更多细节,请参见projectLidarPointsOnImage和fuseCameraToLidar函数。
参考文献
[1] Zhou, Lipu, Zimo Li, and Michael Kaess. “Automatic Extrinsic Calibration of a Camera and a 3D LiDAR Using Line and Plane Correspondences.” In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 5562–69. Madrid: IEEE, 2018. https://doi.org/10.1109/IROS.2018.8593660.















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









