







一、简介
本文章讲述的是自稳模式下,飞控接收到接收机的滚转、俯仰、油门和偏航的输入值后,如何将其转换成目标角度。
本代码为Ardupilot-4.3.7
二、自稳模式代码的输入信号部分
1、get_pilot_desired_lean_angles
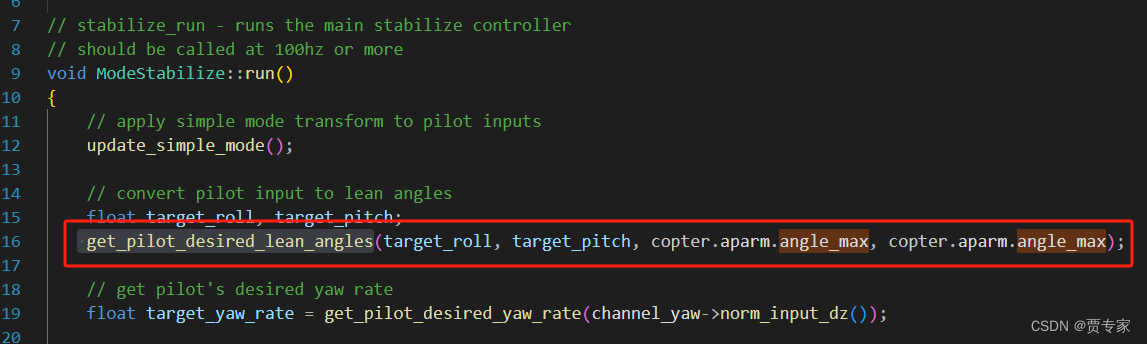
get_pilot_desired_lean_angles函数是将输入量转换成目标滚转角和目标俯仰角,其中滚转通道和俯仰通道的输入范围是-4500~+4500,该函数具体的内容如下:
void Mode::get_pilot_desired_lean_angles(float &roll_out_cd, float &pitch_out_cd, float angle_max_cd, float angle_limit_cd) const
{
// throttle failsafe check
// 判断遥控器是否断连
if (copter.failsafe.radio || !copter.ap.rc_receiver_present) {
roll_out_cd = 0.0;
pitch_out_cd = 0.0;
return;
}
//transform pilot's normalised roll or pitch stick input into a roll and pitch euler angle command
float roll_out_deg;
float pitch_out_deg;
// channel_roll->get_control_in()和channel_pitch->get_control_in()的范围是-4500~4500,ROLL_PITCH_YAW_INPUT_MAX设置为4500
// 第一个和第二个参数的数值范围最终为-1~+1
// angle_max_cd和angle_limit_cd默认值为3000,从地面站参数ANGLE_MAX可以知道
rc_input_to_roll_pitch(channel_roll->get_control_in()*(1.0/ROLL_PITCH_YAW_INPUT_MAX), channel_pitch->get_control_in()*(1.0/ROLL_PITCH_YAW_INPUT_MAX), angle_max_cd * 0.01, angle_limit_cd * 0.01, roll_out_deg, pitch_out_deg);
// Convert to centi-degrees
// 将目标倾斜角的单位从度转换成弧度
roll_out_cd = roll_out_deg * 100.0;
pitch_out_cd = pitch_out_deg * 100.0;
}
可以看到,此函数关键的内容是rc_input_to_roll_pitch函数,此函数是真正的将滚转通道和俯仰通道的值转换成目标倾斜角。输入的第一个参数是滚转通道的数值/4500,输入的第二个参数是俯仰通道的数值/4500,第三个和第四个参数默认值为3000 * 0.01,roll_out_deg和pitch_out_deg是以度为单位输出的目标倾斜角,具体的函数体内容如下所示:
void rc_input_to_roll_pitch(float roll_in_unit, float pitch_in_unit, float angle_max_deg, float angle_limit_deg, float &roll_out_deg, float &pitch_out_deg)
{
// 将最大角度进行限幅,最大不能超过85°,最大角度默认为30°
// 并将最大角度angle_max_deg从度转换成弧度rc_2_rad
angle_max_deg = MIN(angle_max_deg, 85.0);
float rc_2_rad = radians(angle_max_deg);
// fetch roll and pitch stick positions and convert them to normalised horizontal thrust
// pitch_in_unit输入值(范围-1~1)乘上最大弧度角rc_2_rad,目的将滚转和俯仰的位置归一到(-30~+30)中,并转换成推力向量
Vector2f thrust;
thrust.x = - tanf(rc_2_rad * pitch_in_unit);
thrust.y = tanf(rc_2_rad * roll_in_unit);
// calculate the horizontal thrust limit based on the angle limit
// 得到限幅范围
angle_limit_deg = constrain_float(angle_limit_deg, 10.0f, angle_max_deg);
float thrust_limit = tanf(radians(angle_limit_deg));
// apply horizontal thrust limit
// 对滚转和俯仰进行限幅
thrust.limit_length(thrust_limit);
// Conversion from angular thrust vector to euler angles.
// 将推力向量进行反正切处理,转换成弧度
float pitch_rad = - atanf(thrust.x);
float roll_rad = atanf(cosf(pitch_rad) * thrust.y); // ????
// Convert to degrees
// 将弧度转换成角度
roll_out_deg = degrees(roll_rad);
pitch_out_deg = degrees(pitch_rad);
}
问题
rc_input_to_roll_pitch函数中的roll_rad = atanf(cosf(pitch_rad) * thrust.y)还没有弄明白
总结
将-4500~+4500的输入值转换成目标角度

















 976
976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









