







一、引言
三次样条是运动规划中常用的一种拟合曲线的方法,比如MPC的路径跟踪就可以用样条拟合曲线,得到将来的期望值。本文对三次样条参数的求解进行详细的阐述。
二、内容详解
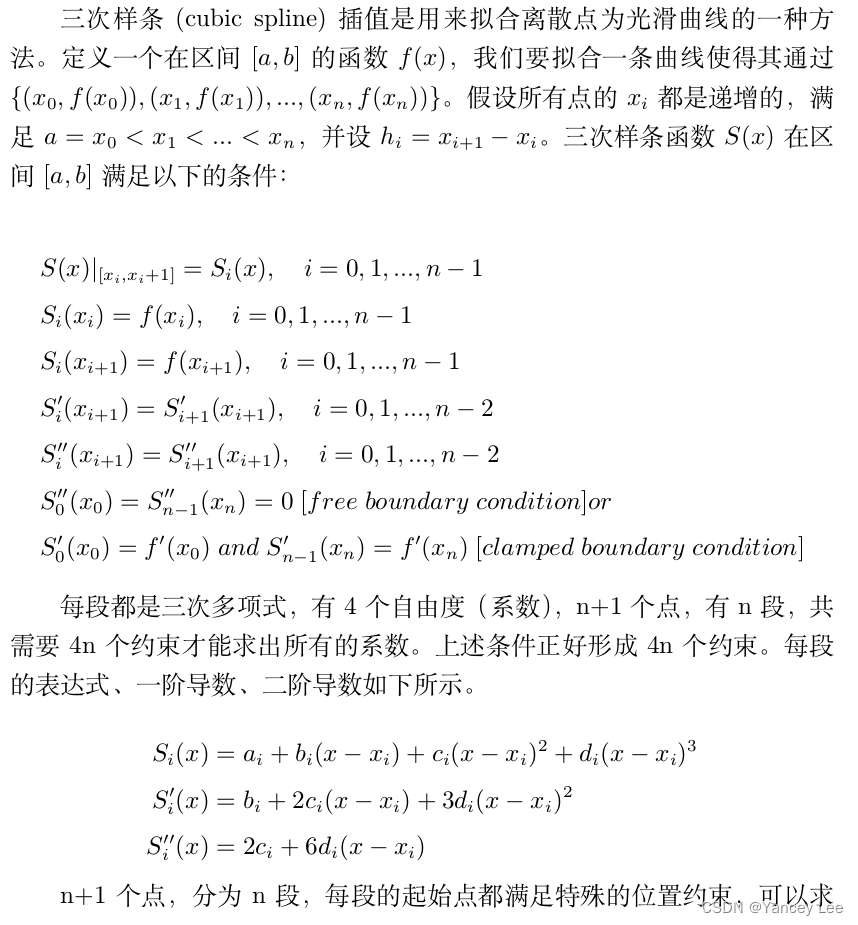
 相关的具体实现可点击参考文献中的连接,Hermite Spline只保证一阶连续,Cubic Spline 保证二阶连续。
相关的具体实现可点击参考文献中的连接,Hermite Spline只保证一阶连续,Cubic Spline 保证二阶连续。
三、参考文献
[1]https://kluge.in-chemnitz.de/opensource/spline/
[2]https://github.com/ttk592/spline
[3]PythonRobotics















 5577
5577











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









