







图片来源——古月居ros入门21讲
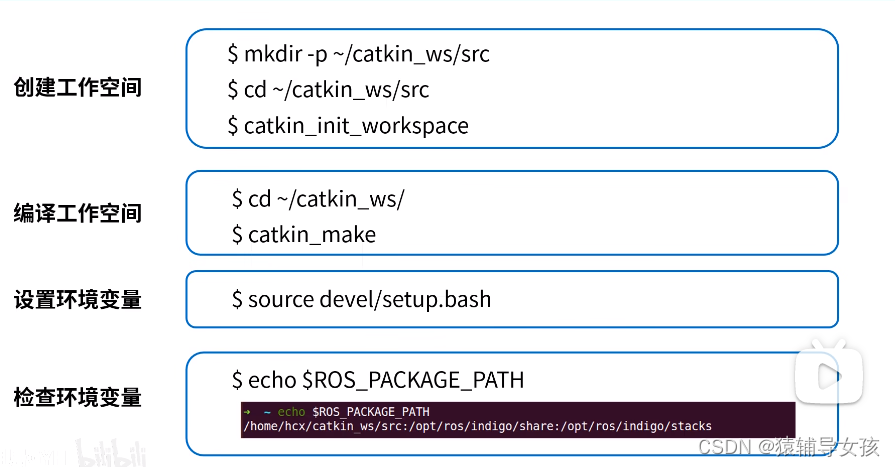
补充一点当使用多个终端的时候每次都要进行 source操作,不然容易报错。还有一个解决办法就是使用
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
pubulisher 编程实现
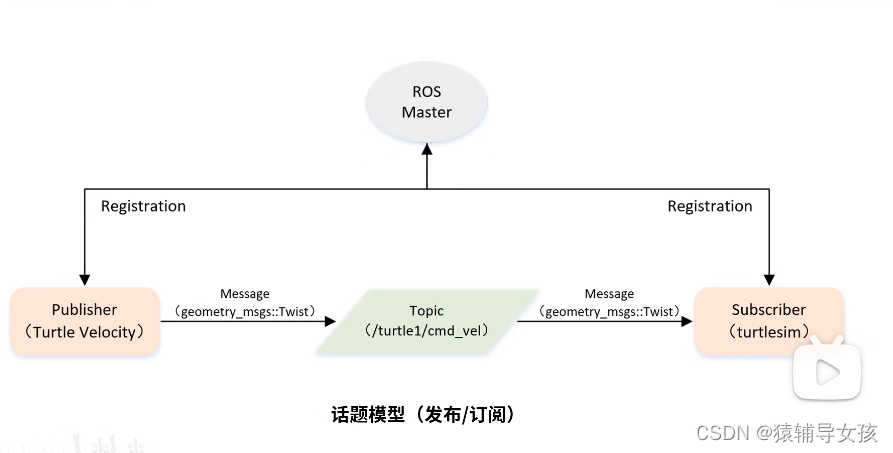

新建cpp文件velocity_publisher.cpp
由于新编写了一个cpp文件,需要在CMakelist中添加信息,包含的信息如下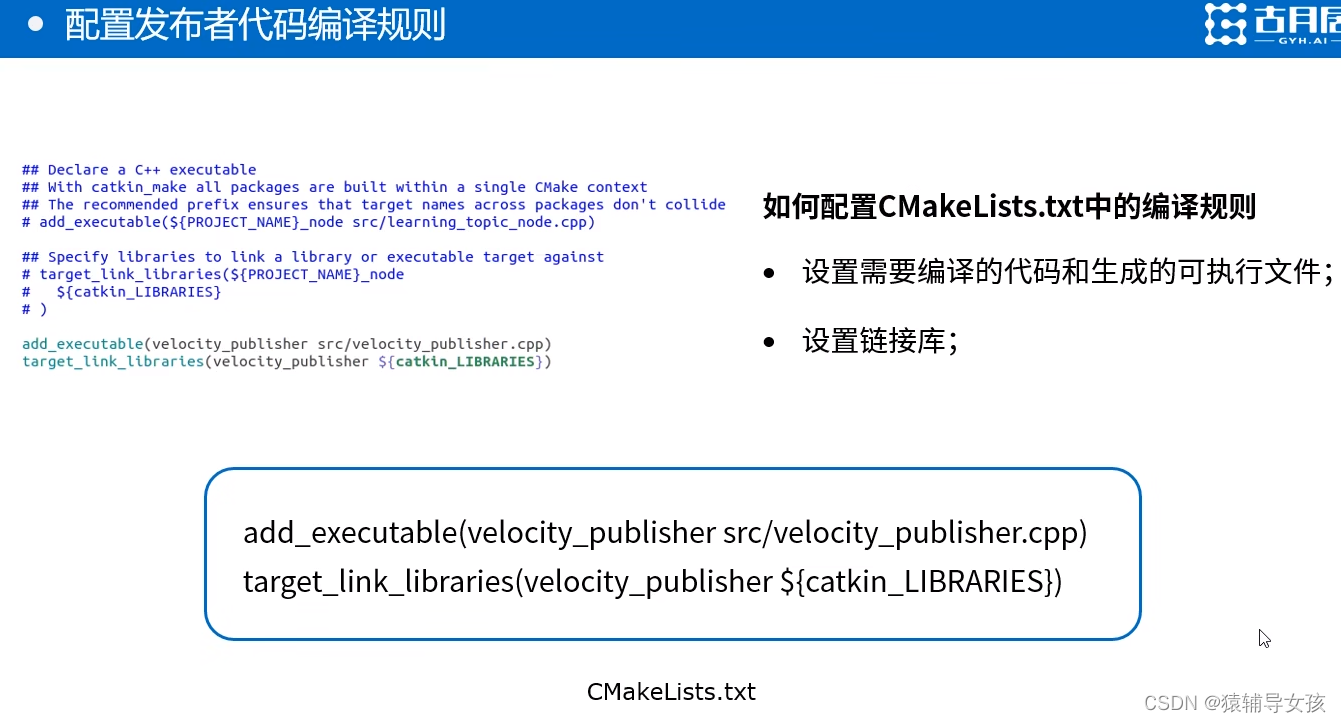
完成以上步骤后进行编译
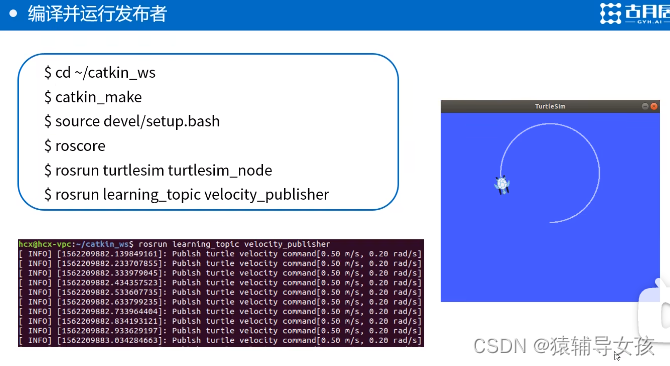
这种方式编译还是需要打开多个终端,可是这种方法不太人性化。以后应该会讲launch文件,讲了再说吧。
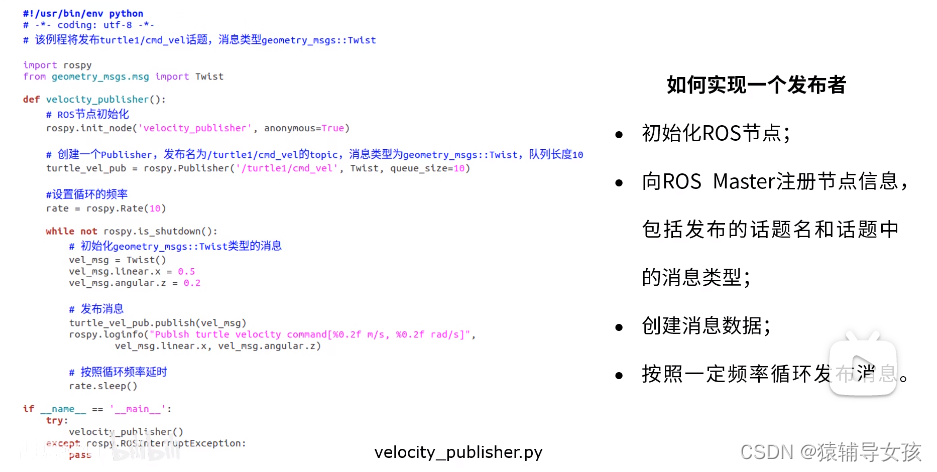
同一个功能,这个是用python写的。下一节讲的是subscriber,我觉得和这个差不多这一篇就到这了。















 201
201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









