







已知坐标系统(ori, uAxis, vAxis, nAxis),构造转换矩阵。
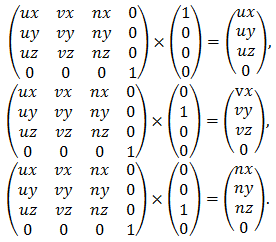
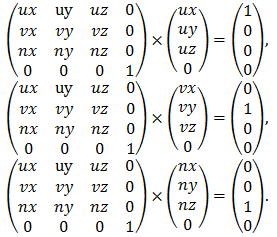
构造旋转矩阵的诀窍就是将旋转矩阵与转换前的坐标系统的坐标轴基向量相乘,能最终得到对应的将要构造的坐标系统的坐标轴基向量:如果是从WCS转换到OCS,则将旋转矩阵与基向量(1,0,0),(0,1,0)和(0,0,1)分别相乘,使其能得到uAxis, vAxis,nAxis;如果是从OCS转换到WCS,则将旋转矩阵与基向量uAxis, vAxis和nAxis分别相乘,使其能得到基向量(1,0,0),(0,1,0)和(0,0,1)。
如下所示旋转矩阵(wcs->ocs),
如下所示旋转矩阵(ocs->wcs),
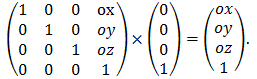
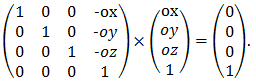
构造平移矩阵的诀窍就是将平移矩阵与转换前的坐标系统的原点相乘,能最终得到最终对应的将要构造的坐标系统的原点:如果是从WCS转换到OCS,则将平移矩阵与原点(0,0,0)相乘,使其能得到ori;如果是从OCS转换到WCS,则将平移矩阵与ori相乘,使其能得到(0,0,0)。
如下所示平移矩阵(wcs->ocs),
如下所示平移矩阵(ocs->wcs),
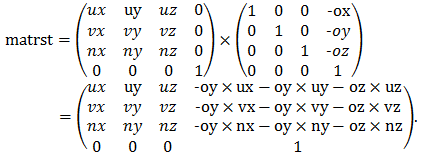
a. 从wcs到ocs
先旋转再平移:所以matrst= matt ×matr。

b. 从ocs到wcs
选平移在旋转:所以matrst= matr×matt。















 7060
7060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









