







前言
暂无
提示:以下是本篇文章正文内容,下面案例可供参考
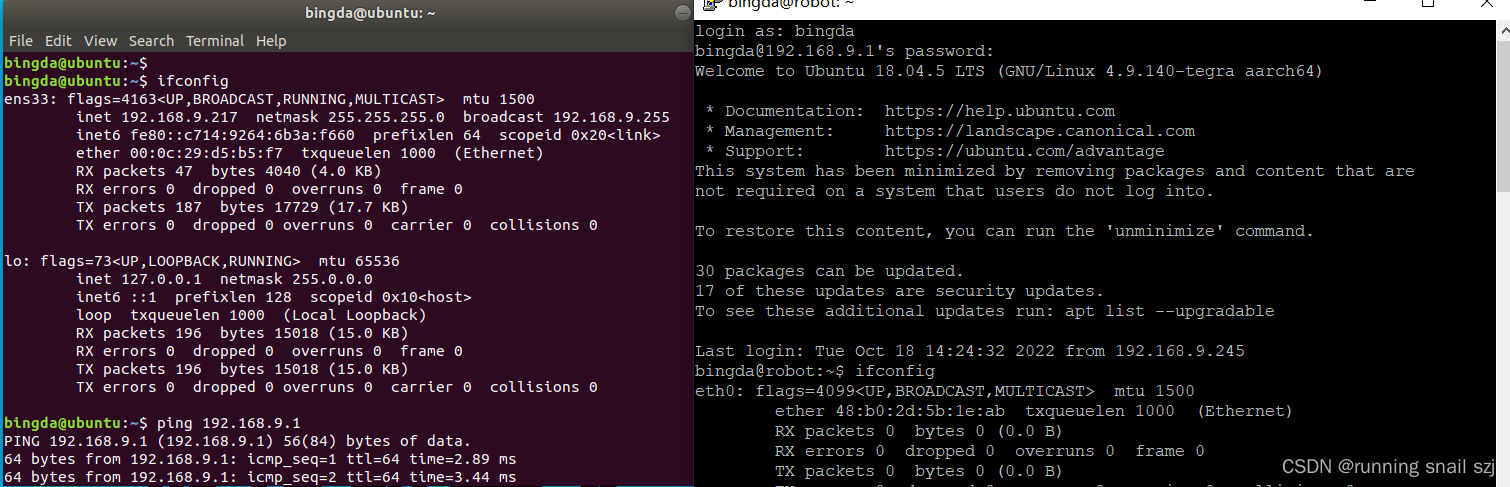
一、虚拟机与小车ping通
先分别用ifconfig查看各自的IP,再相互ping通,满足基本网络通信。
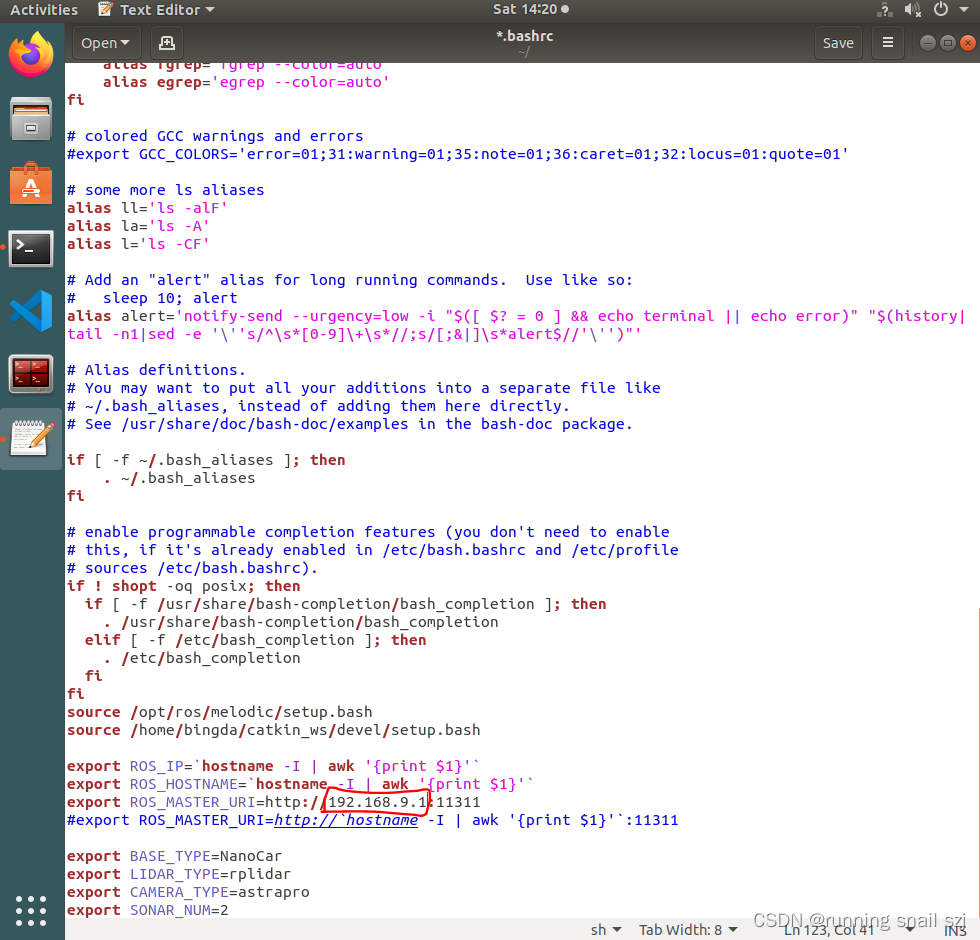
二、配置分布式
在虚拟机PC端,可以使用图形化编辑工具gedit .bashrc,修改小车的IP,并保存后source .bashrc重新加载。
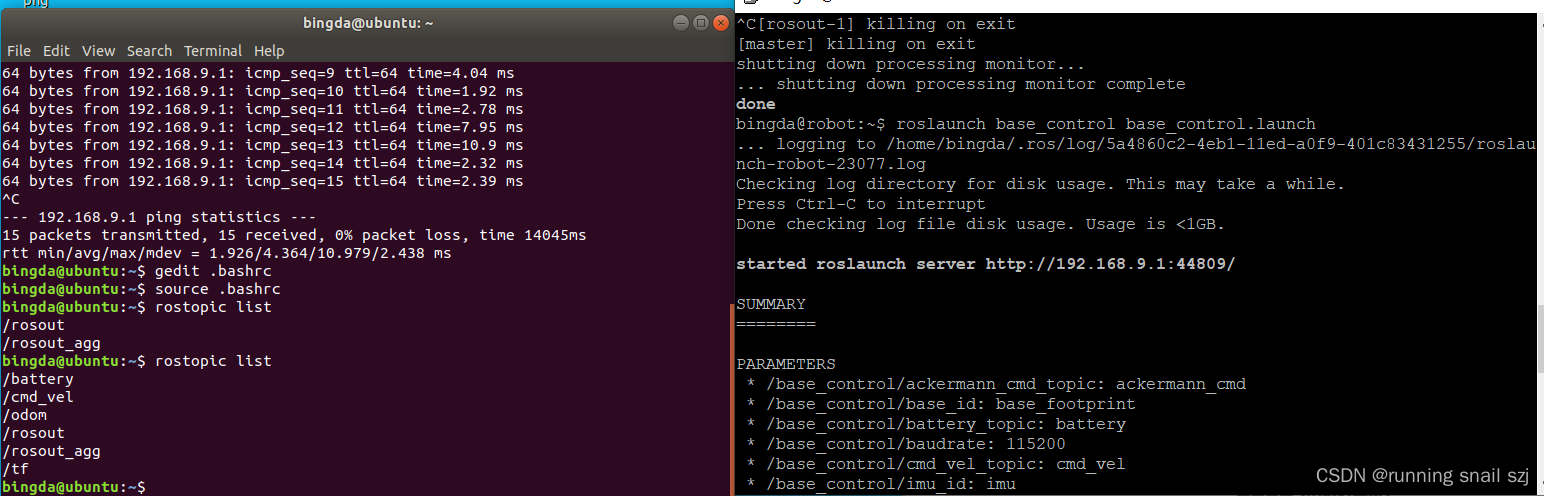
可以在小车端运行roscore,虚拟机运行rostopic list,发现虚拟机有ros小车的话题,启动小车底盘也可看到地盘信息。
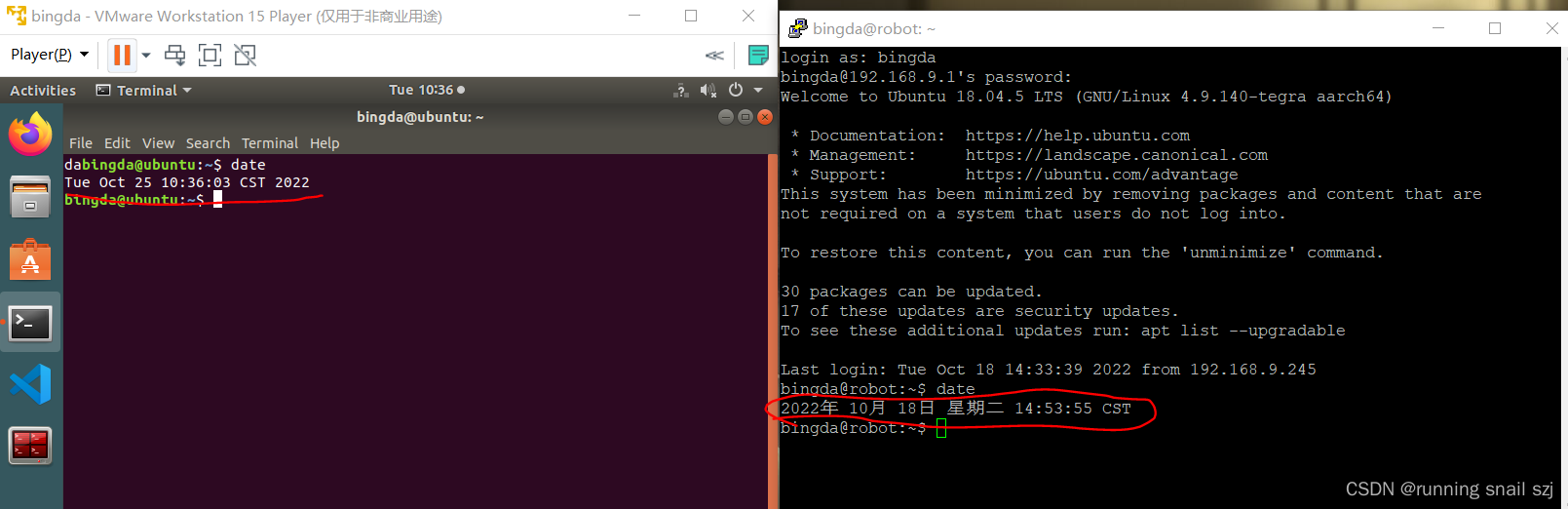
三、机器人和PC时间同步
这样可以保证时间戳同步
date命令可以查看时间,并不一致
先在PC端安装pt充当时间服务器,sudo apt install ntp
,ifconfig查看PC的地址,然后在小车端sudo ntpdate 192.168.9.213
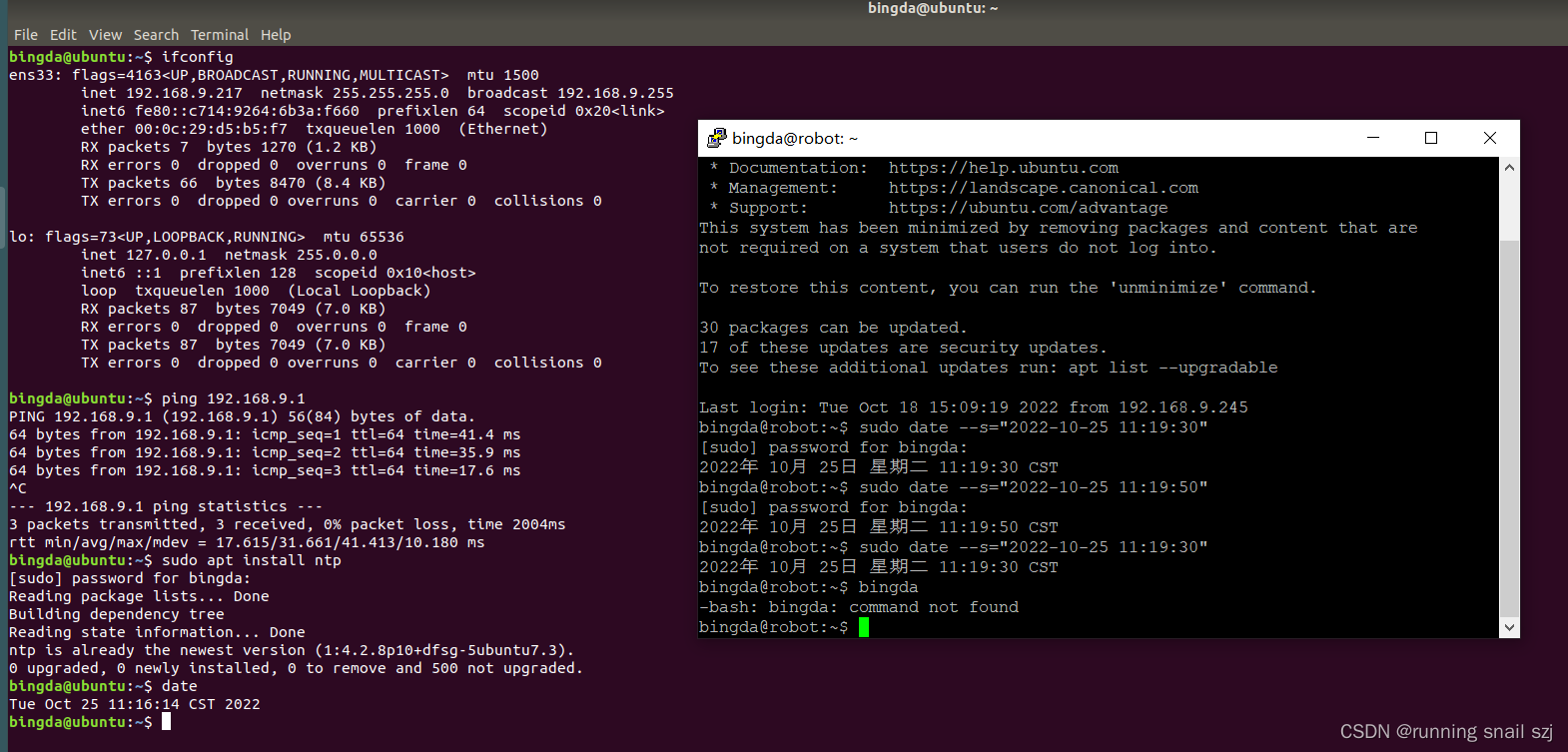
也可以手打输入时间sudo date --s =“2022-10-226 14:42:00”















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









