










👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
随着5G时代的到来,商业通信服务呈现爆炸式增长,导致本就有限的频谱资源变得更加拥塞与稀缺。为最大限度地利用稀缺频谱,出现了允许单个系统同时适应雷达和通信功能的技术。
本文实现滤波及数据融合【滤波包括了常增益滤波、卡尔曼(Kalman)滤波和扩展卡尔曼滤波(EKF) 数据融合采用BC和CC两种,基于KF和EKF实现】
📚2 运行结果
2.1 EKF
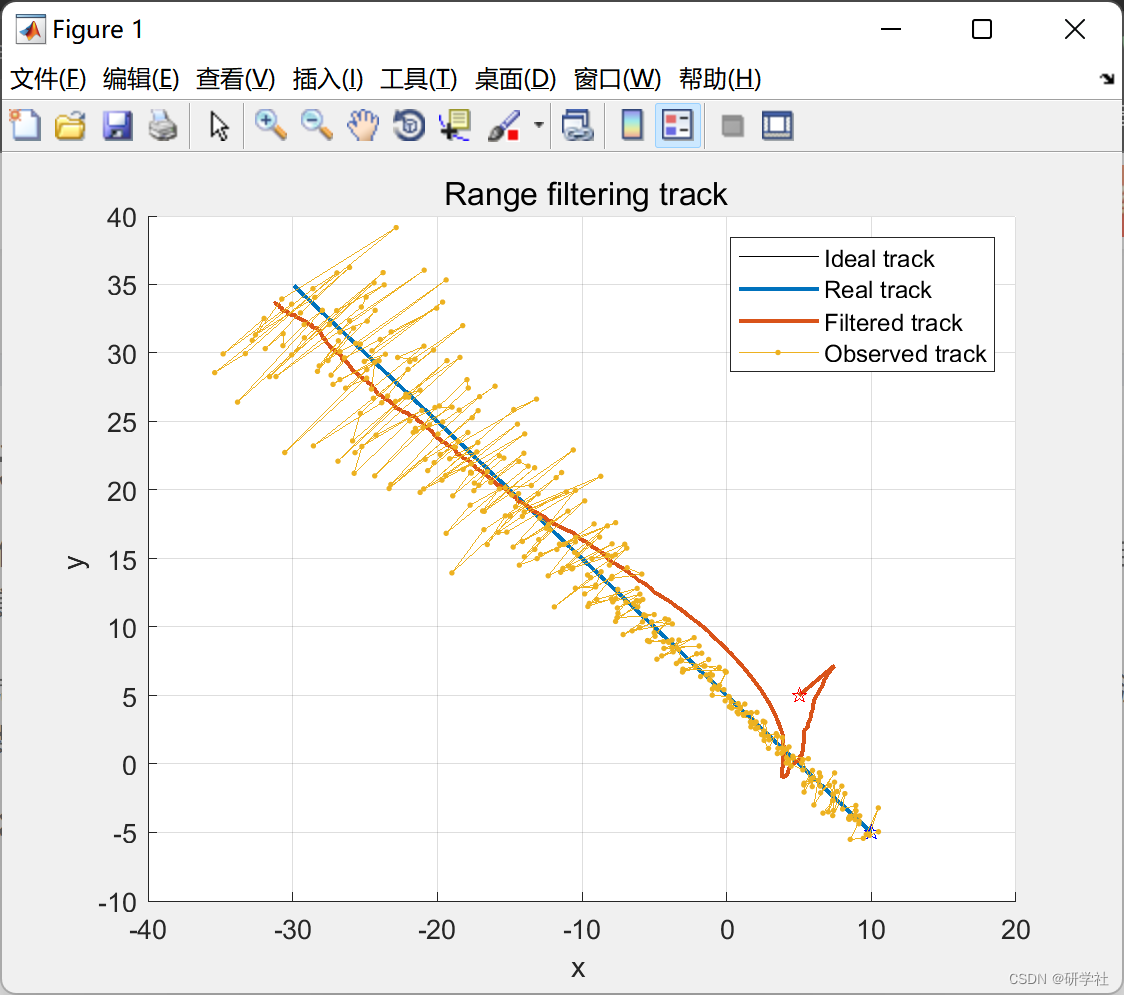
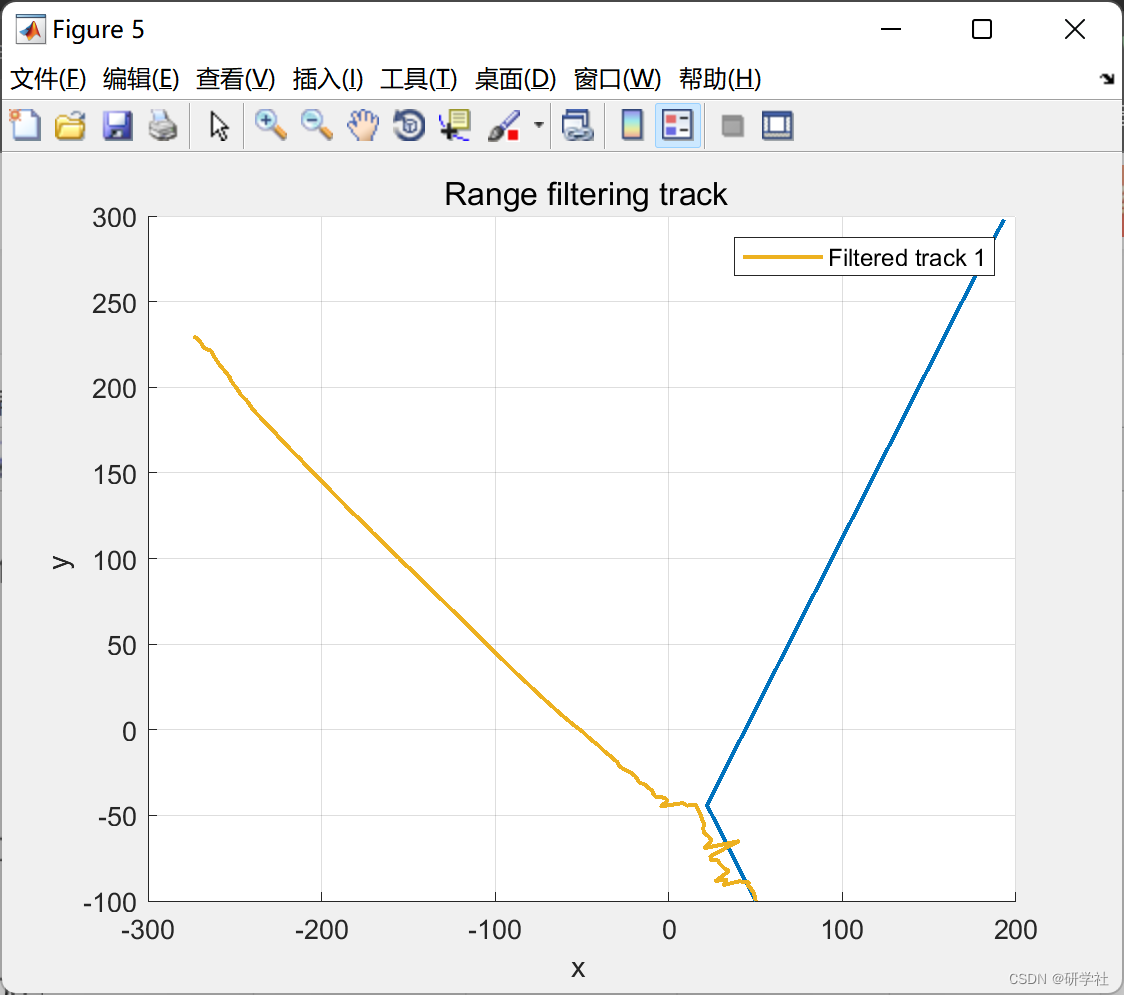
2.2  过滤器2D
过滤器2D

部分代码:
sigma = 1;
noise = randn(2,N).*sigma;
%initial data
X = zeros(4,N);
Z = zeros(2,N);
X(:,1) = [0, 5, 0, 10];
Z(:,1) = [X(1,1),X(3,1)];
sigma_error=[1,1];
a = 0.3; %alpha 0.3-0.5
b = 2*(2-a)-4*sqrt(1-a);%beta, determined by alpha
K = [a, b/T, 0, 0
0, 0, a, b/T]'; %filter gain
%transition matrix
F = [1 T 0 0
0 1 0 0
0 0 1 T
0 0 0 1];
%observation matrix
H = [1 0 0 0
0 0 1 0];
%real & observed data
for n=2:N
X(:,n) = F * X(:,n-1);
Z(:,n) = H * X(:,n) + noise(:,n);
end
figure;
hold on;grid on;
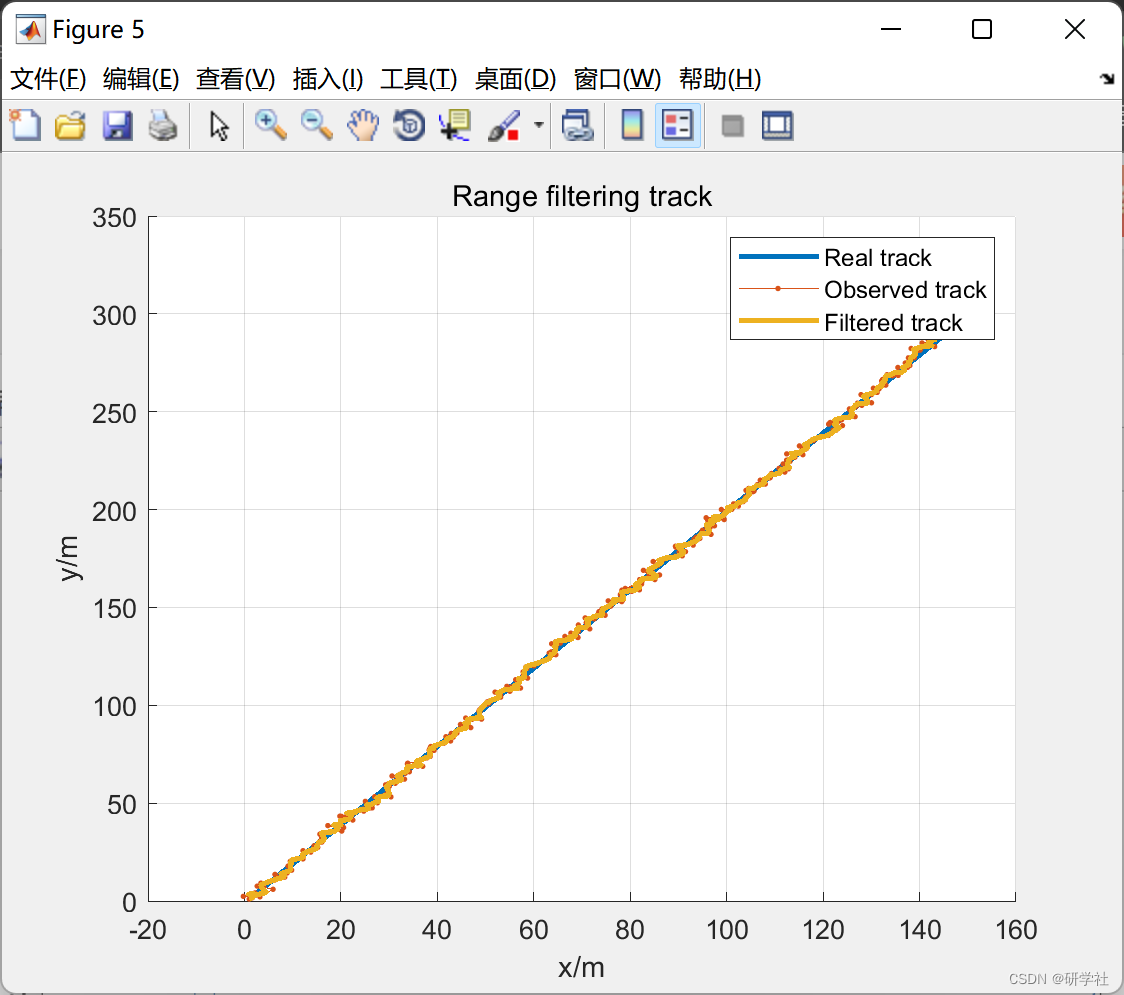
plot(X(1,:),X(3,:),'LineWidth',2);
plot(Z(1,:),Z(2,:),'.-');
X_update = zeros(4,N);
X_update(:,1) = X(:,1);
%filter
a = [0 0.1 0.3 0.5 1];
for n=2:N
X_p = F * X_update(:,n-1);
Z_p = H * X_p;
X_update(:,n) = X_p + K*(Z(:,n)-Z_p);
end
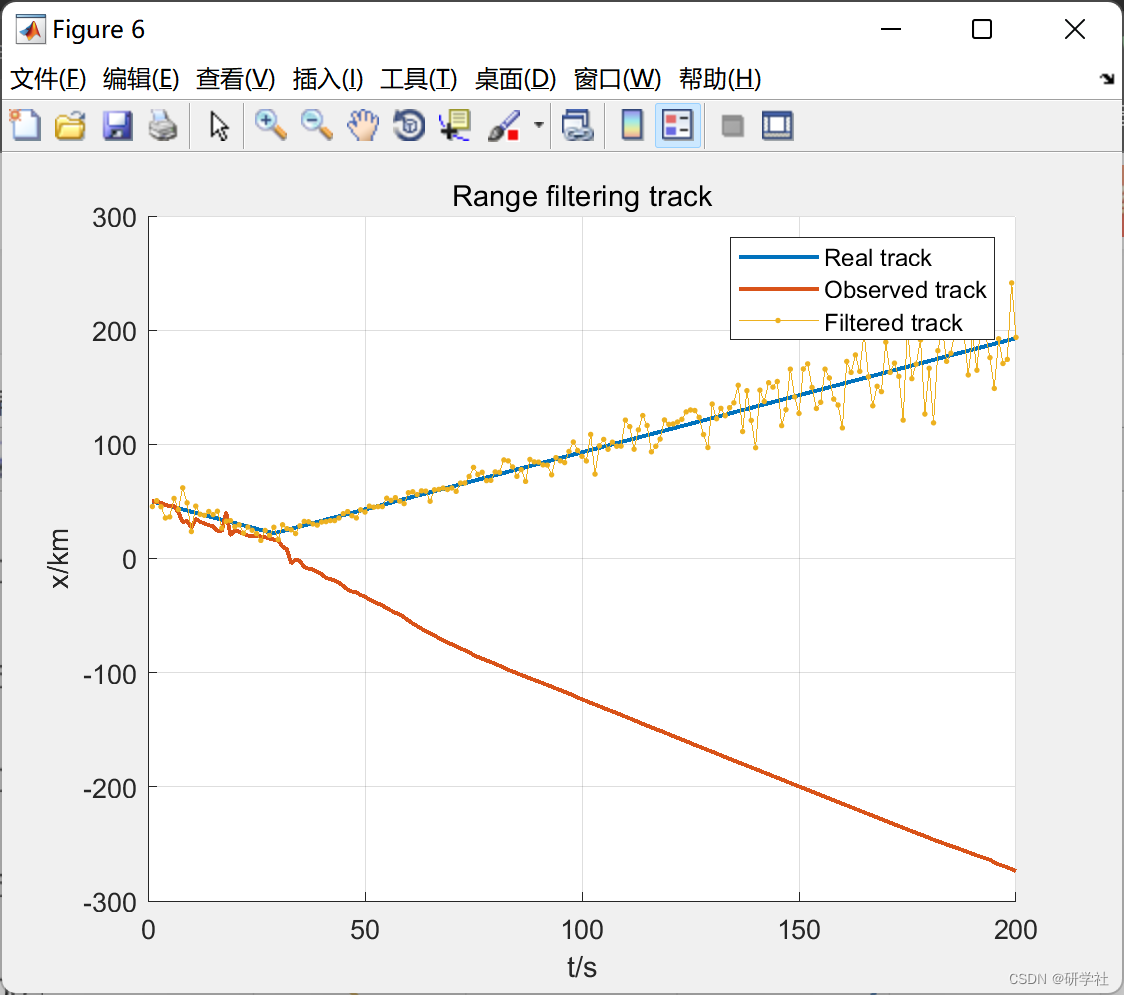
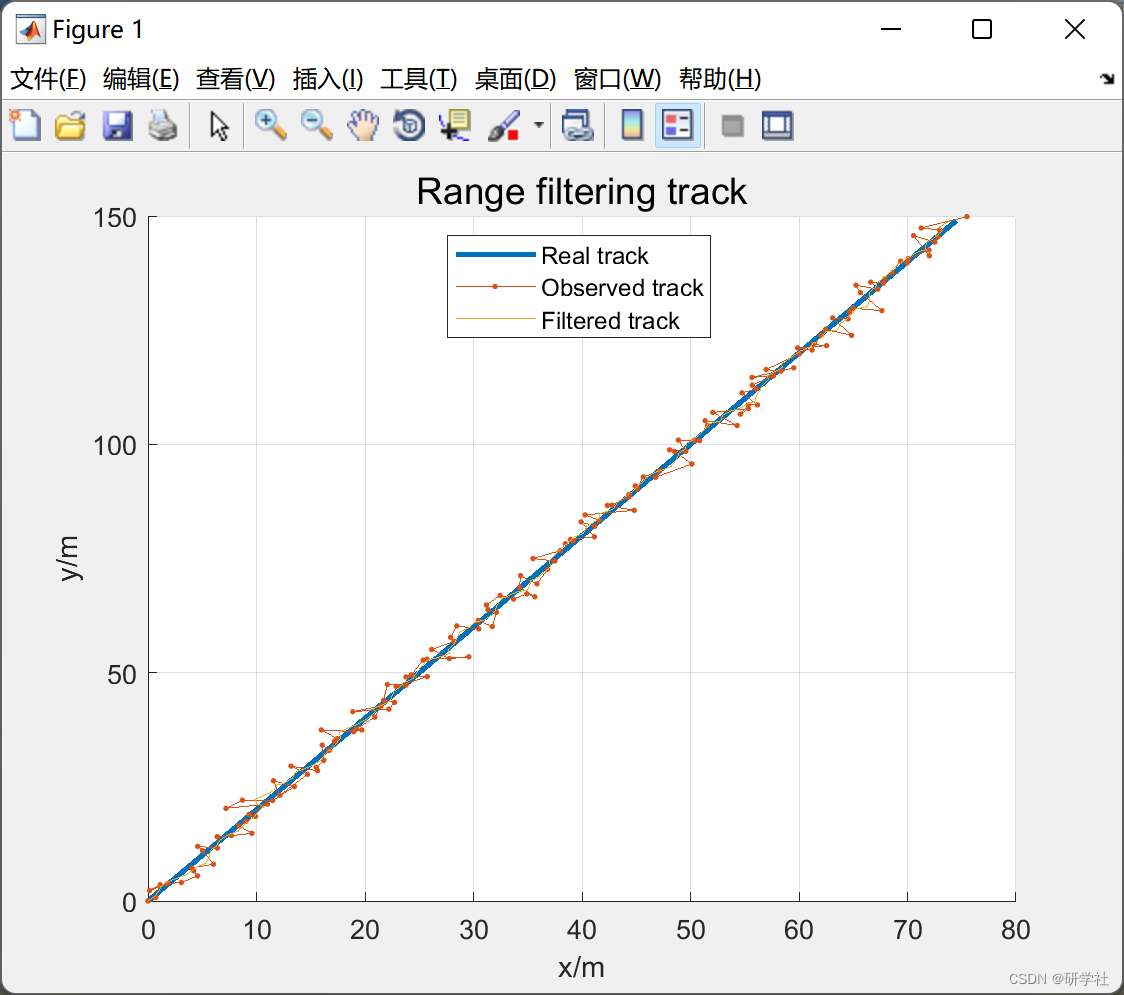
plot(X_update(1,:),X_update(3,:));
xlabel('x/m');ylabel('y/m');legend('Real track','Observed track','Filtered track');
title('\fontsize{14}Range filtering track')
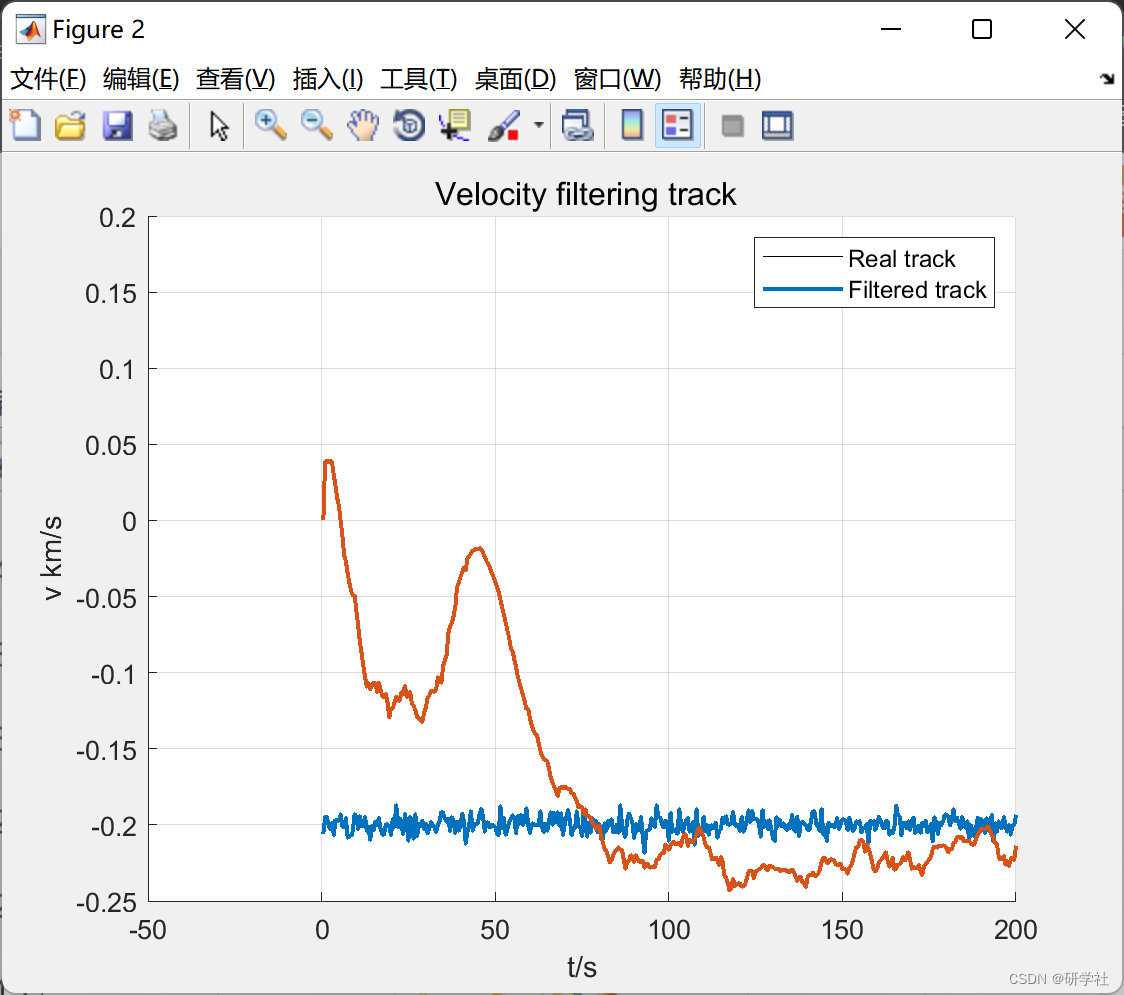
figure;
hold on;grid on;
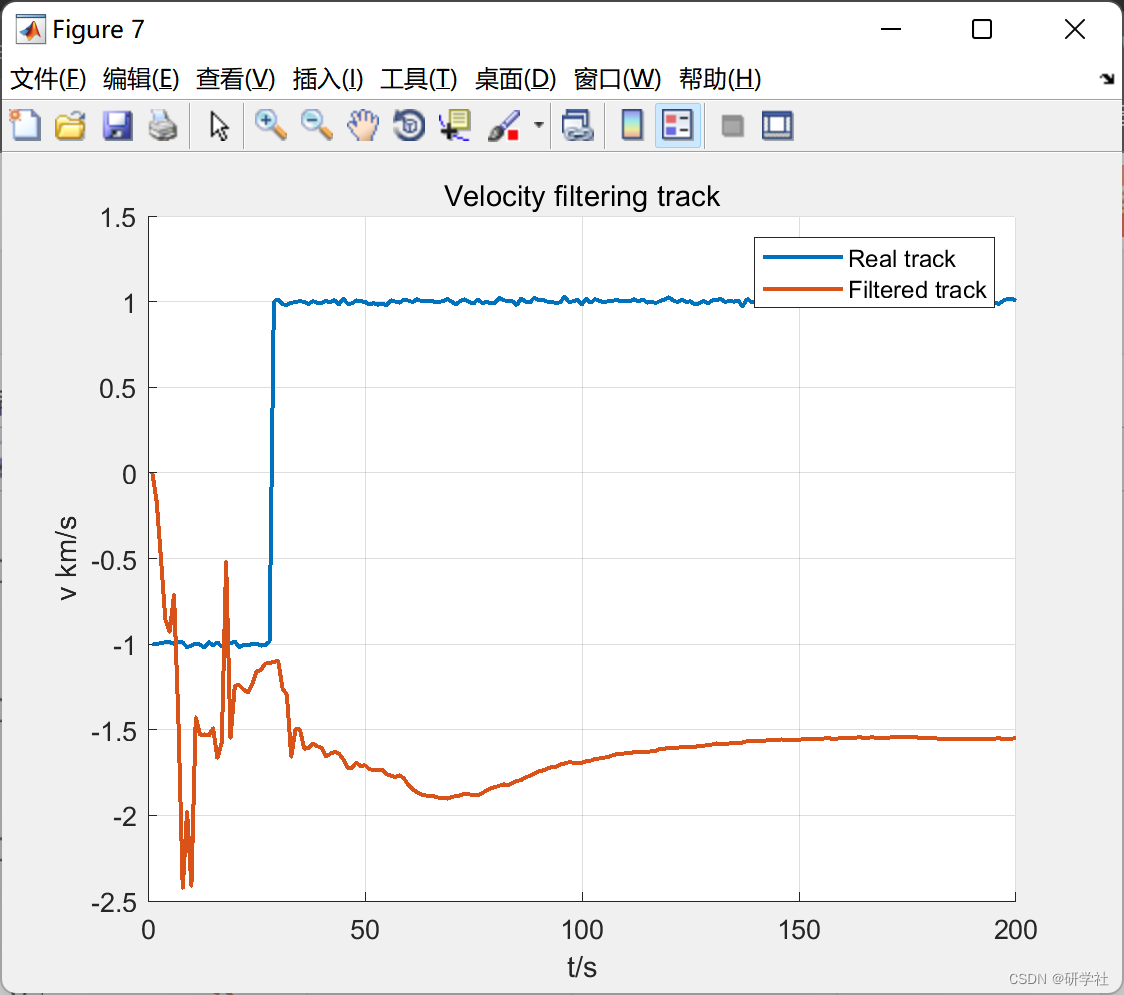
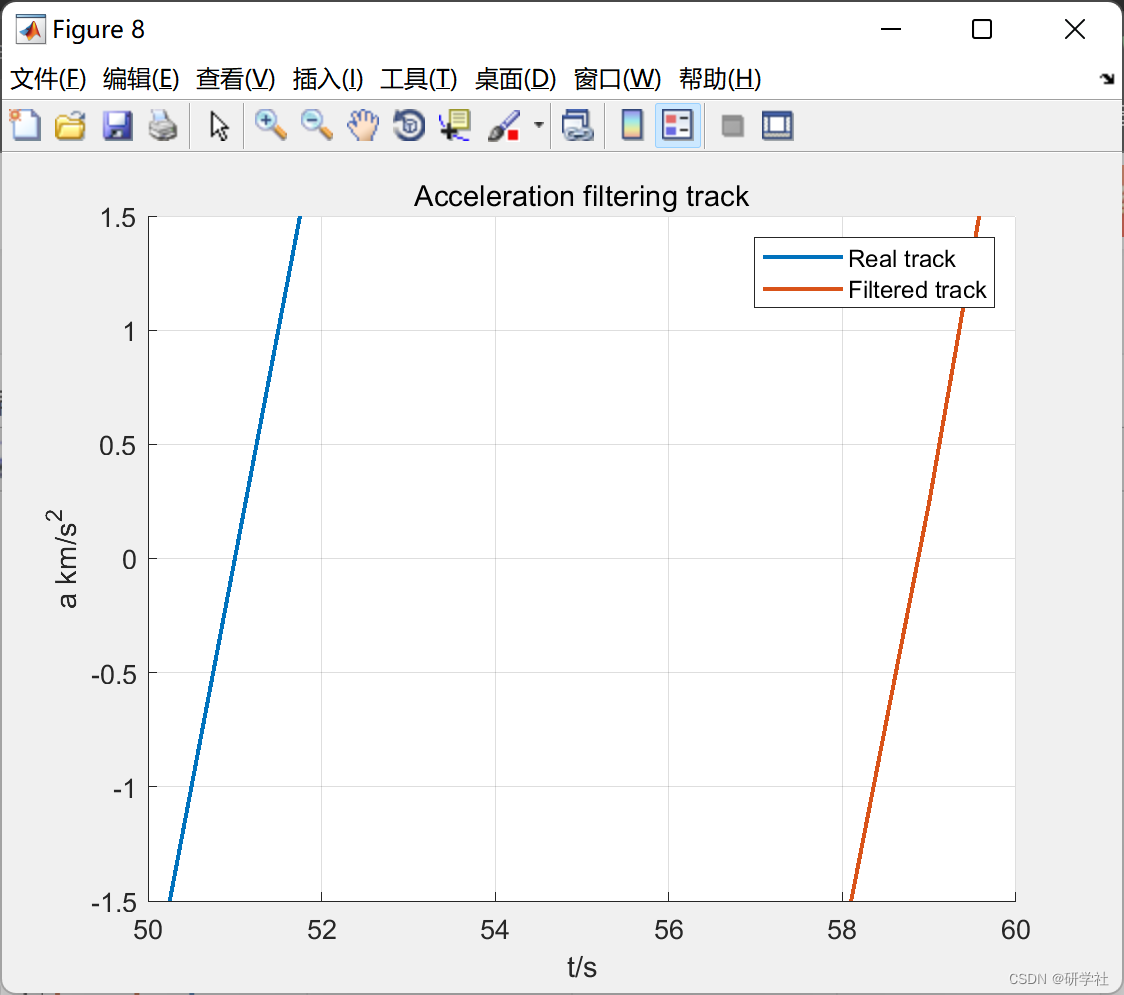
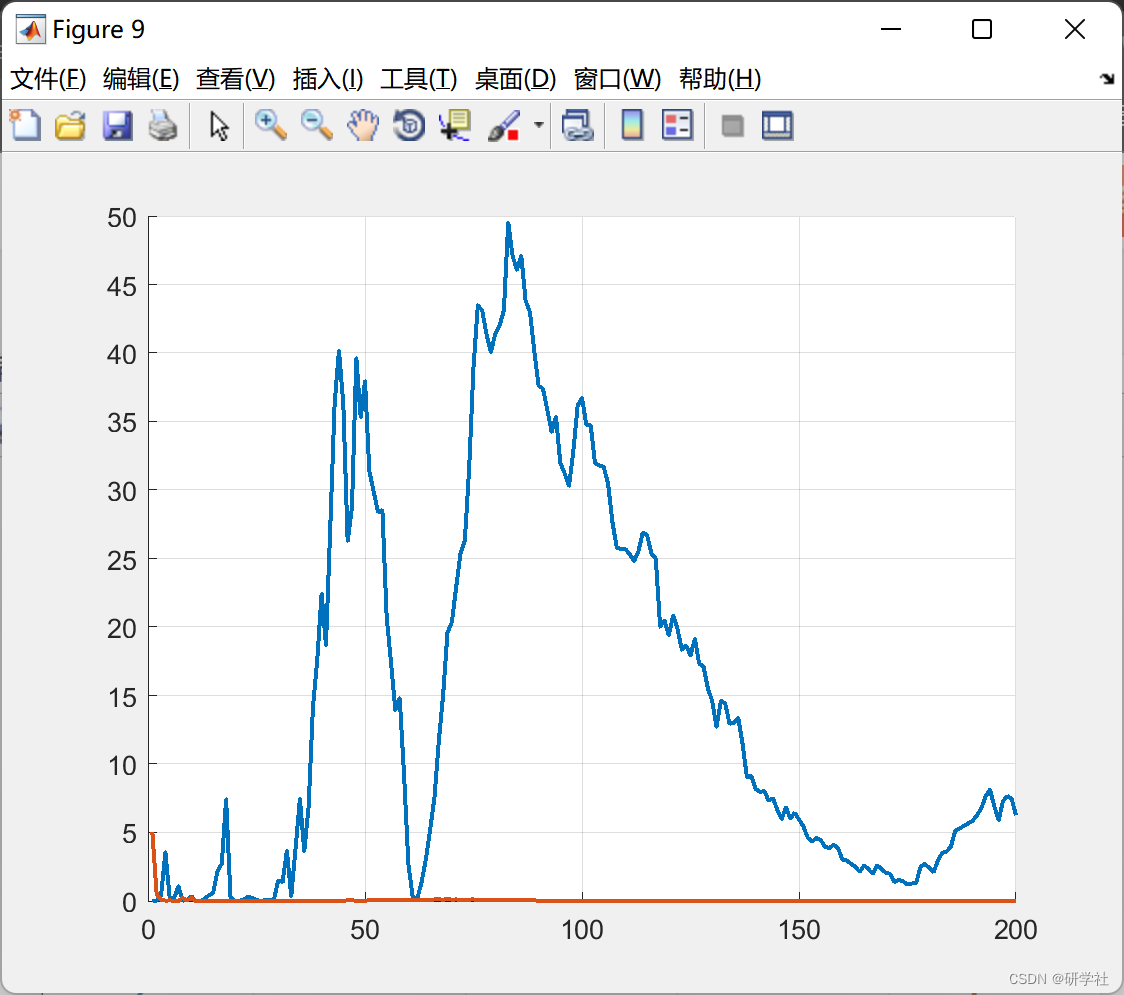
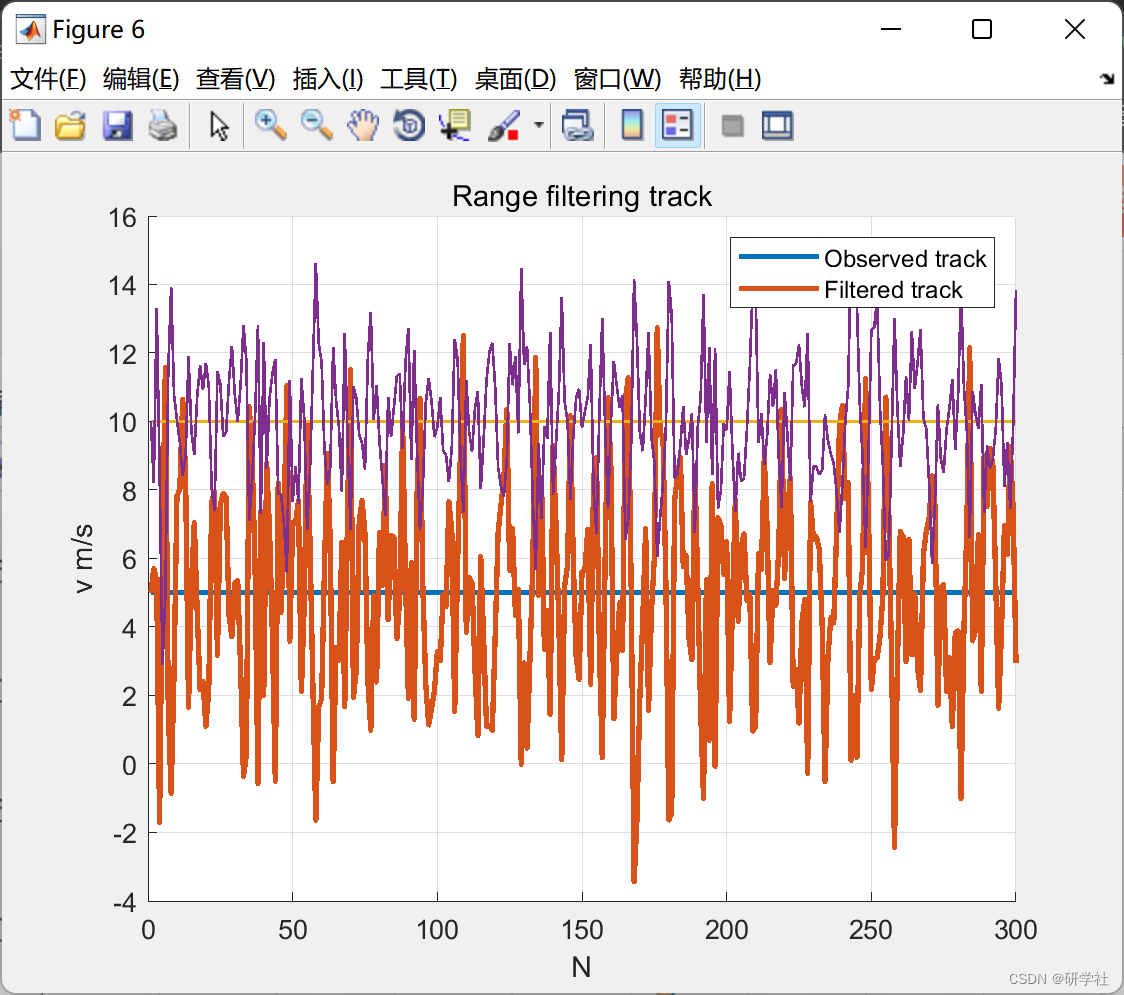
plot(X_real(2,:),'LineWidth',2);
plot(X_update(2,:),'LineWidth',2);
plot(X_real(4,:),'LineWidth',1);
plot(X_update(4,:),'LineWidth',1);
xlabel('N');ylabel('v m/s');legend('Observed track','Filtered track');
title('Range filtering track')
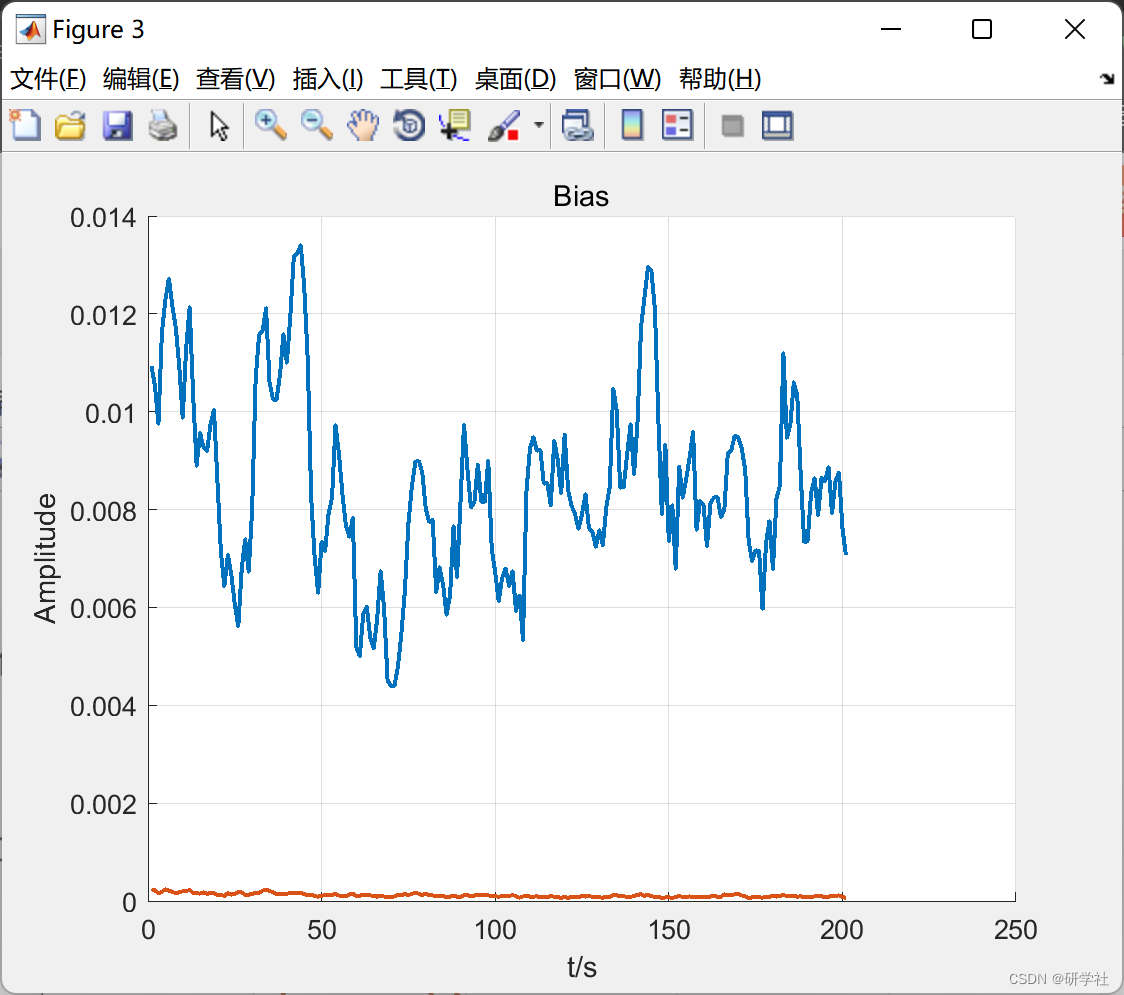
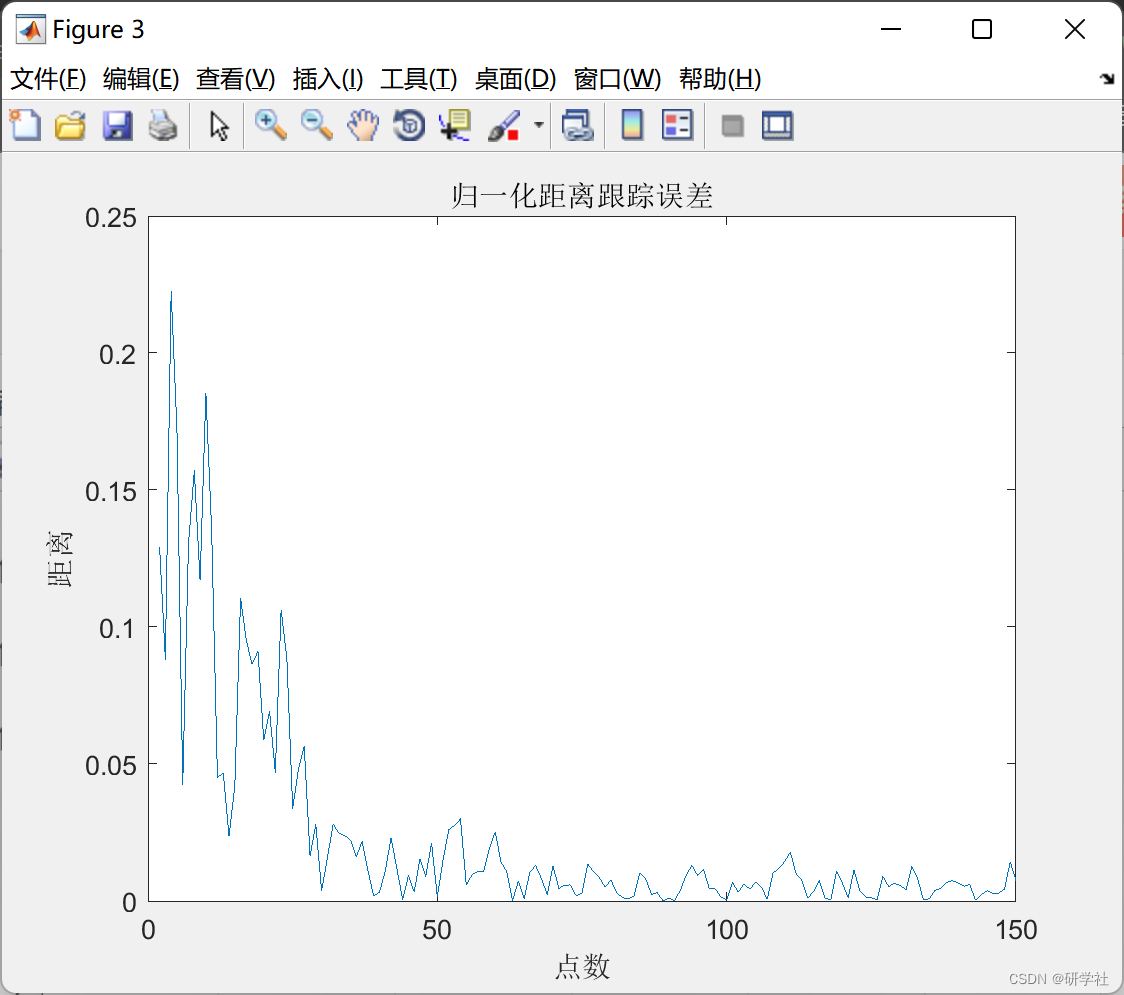
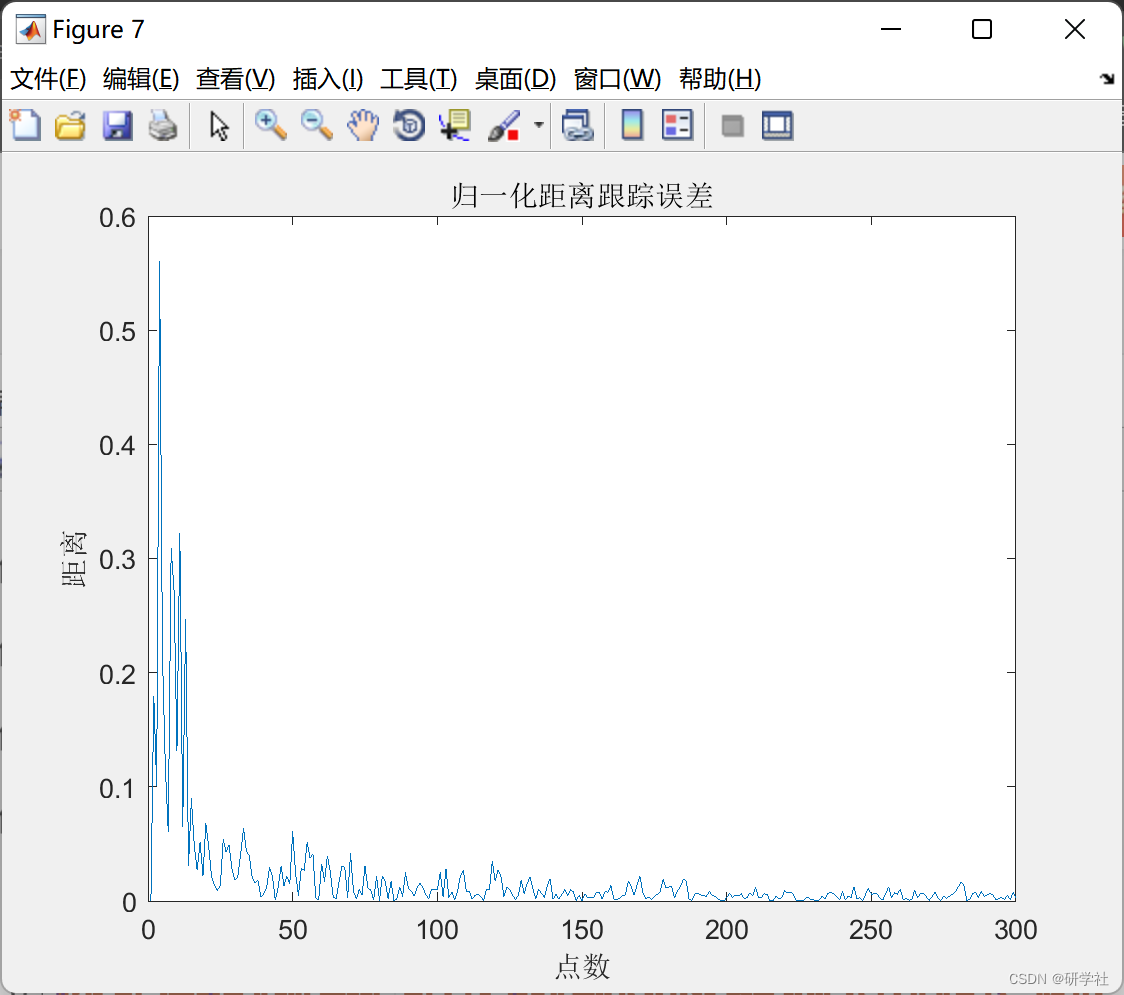
figure;grid on;
plot(abs(X_update(1,:)-X(1,:))./X(1,:));
title('归一化距离跟踪误差');xlabel('点数');ylabel('距离');
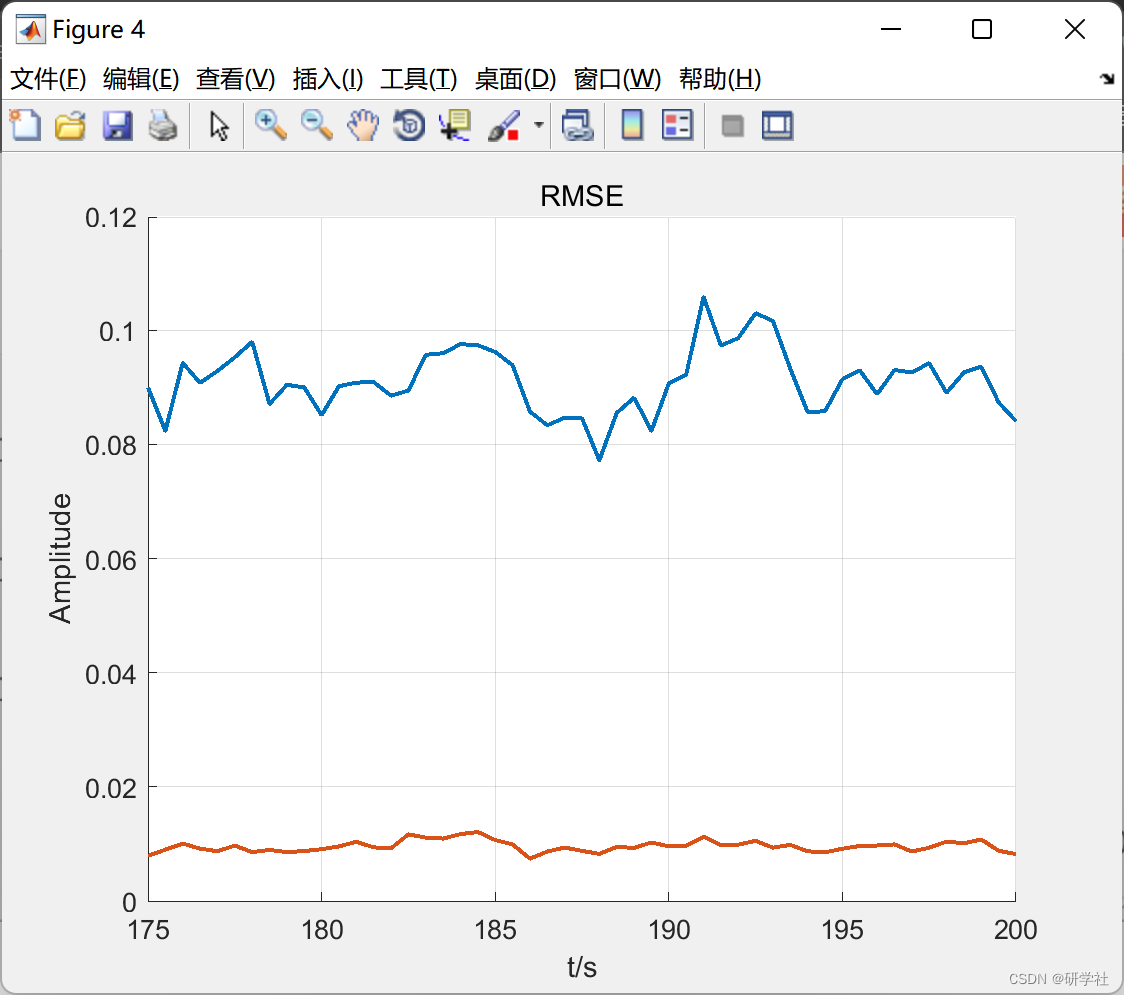
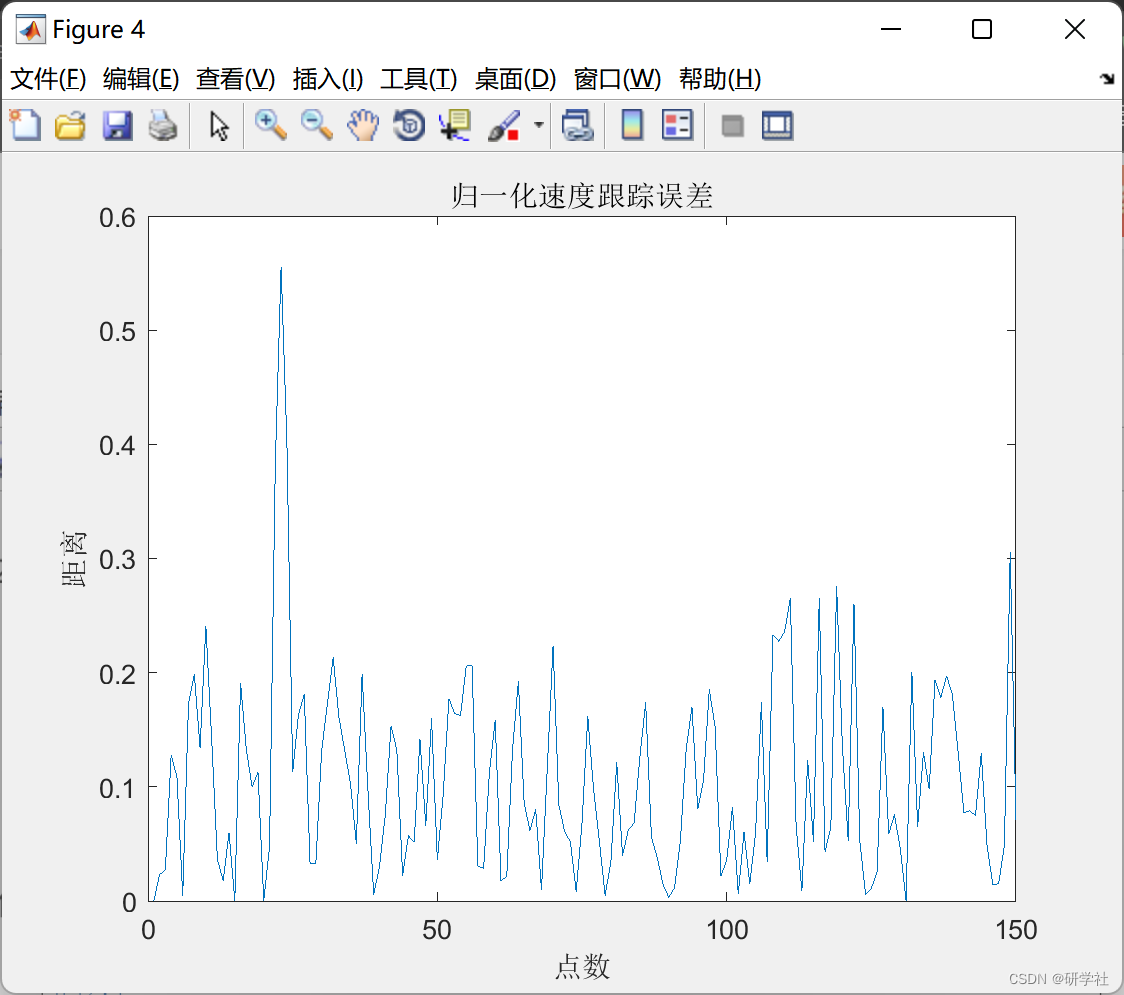
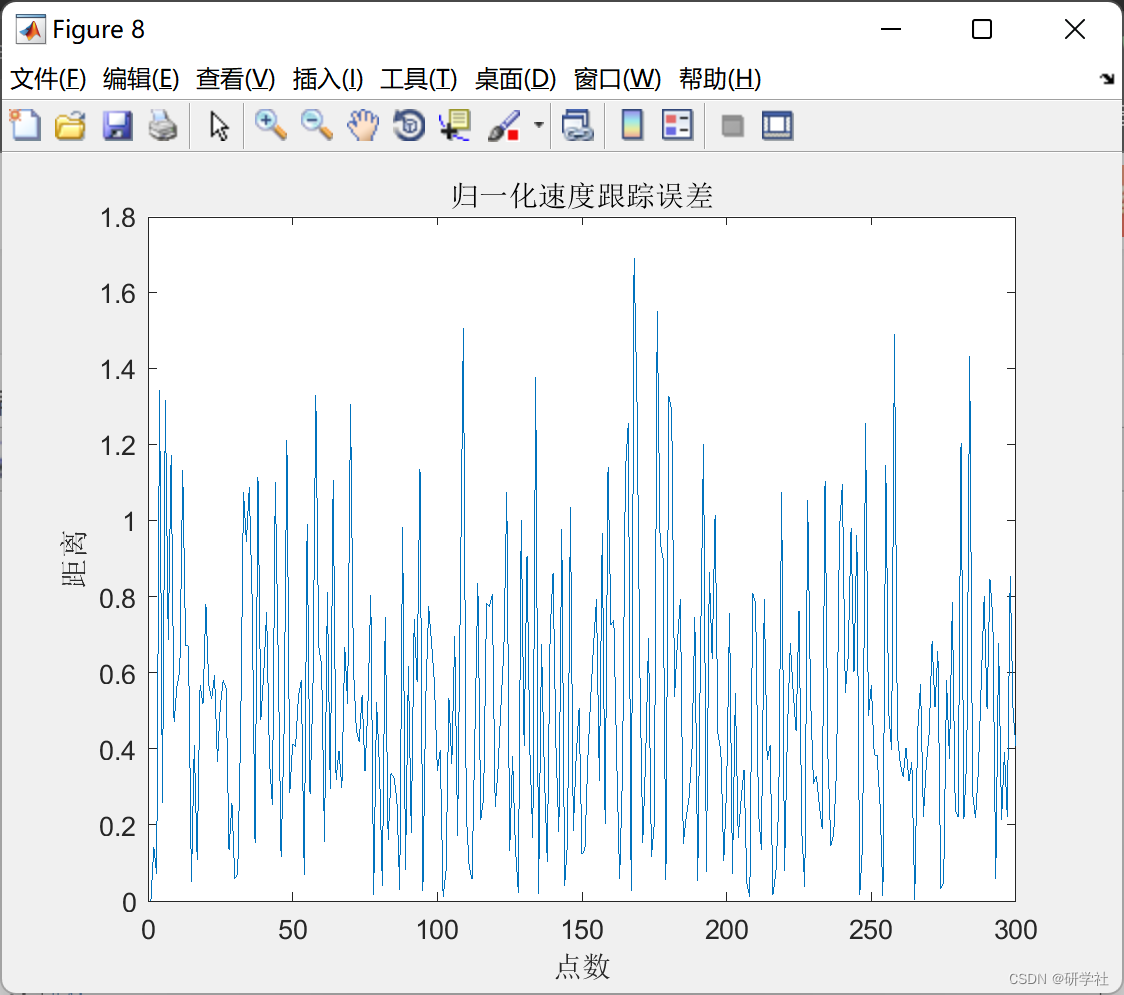
figure;grid on;
plot(abs(X_update(2,:)-X(2,:))./X(2,:));
title('归一化速度跟踪误差');xlabel('点数');ylabel('距离');
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘欣欣,周传睿,姚元,伍光新,邢文革.面向多用户相控阵雷达通信的宽带波束赋形研究(英文)[J].现代雷达,2022,44(08):62-68.DOI:10.16592/j.cnki.1004-7859.2022.08.010.
[2]李国琳,郭文彬.雷达通信一体化波形设计综述[J].移动通信,2022,46(05):38-44.
















 1963
1963











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











