







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
由于无人机的高机动性以及具有高概率空对地视距通信,最近无人机辅助MEC 系统被大量学者进行了广泛的研究[43-48]。研究方向也主要集中在能耗最小化[49-61]、延迟最小化[62]、任务完成时间最小化[63]、能效最大化[64]及通信吞吐量最大化[65]等。而在能耗最小化的研究中又可分为单无人机辅助 MEC 系统和多无人机辅助 MEC 系统。
📚2 运行结果
 部分代码:
部分代码:
N2=50; %divide matrix into N2*N2 grid when drawing
% TARGET2plot=[0.895,0.898];
TARGET2plot=TARGET/N;
hold on
%% draw obstacles
% E_matrix=Ematrix(N2,enemysUK2plot);
E_matrix = getEmatrix(N2,enemysUK2plot);
[X,Y]=meshgrid(linspace(0,1,N2),linspace(0,1,N2));
contour(X,Y,E_matrix','DisplayName','E'); %draw obstacles' contour line
%% draw TUs
for i=1:size(TU_info,1)
plot(TU_info(i,1),TU_info(i,2),'ko','Color','r','LineWidth',10,'MarkerSize',TU_info(i,3)*3);
plot(TU_info(i,1),TU_info(i,2),'+','Color','b','MarkerSize',8,'LineWidth',1.5);
end
%% draw TUs service demand matrix
for i=1:N2
for j=1:N2
plot(i/N2,j/N2,'ko','Color','r','LineWidth',1,'MarkerSize',TU_demand_matrix(i,j)+0.0001);
end
end
xlabel('x');
ylabel('y');
axis([ 0 1.02 0 1.02]);
set(gcf,'Position',[900 300 450 400]);
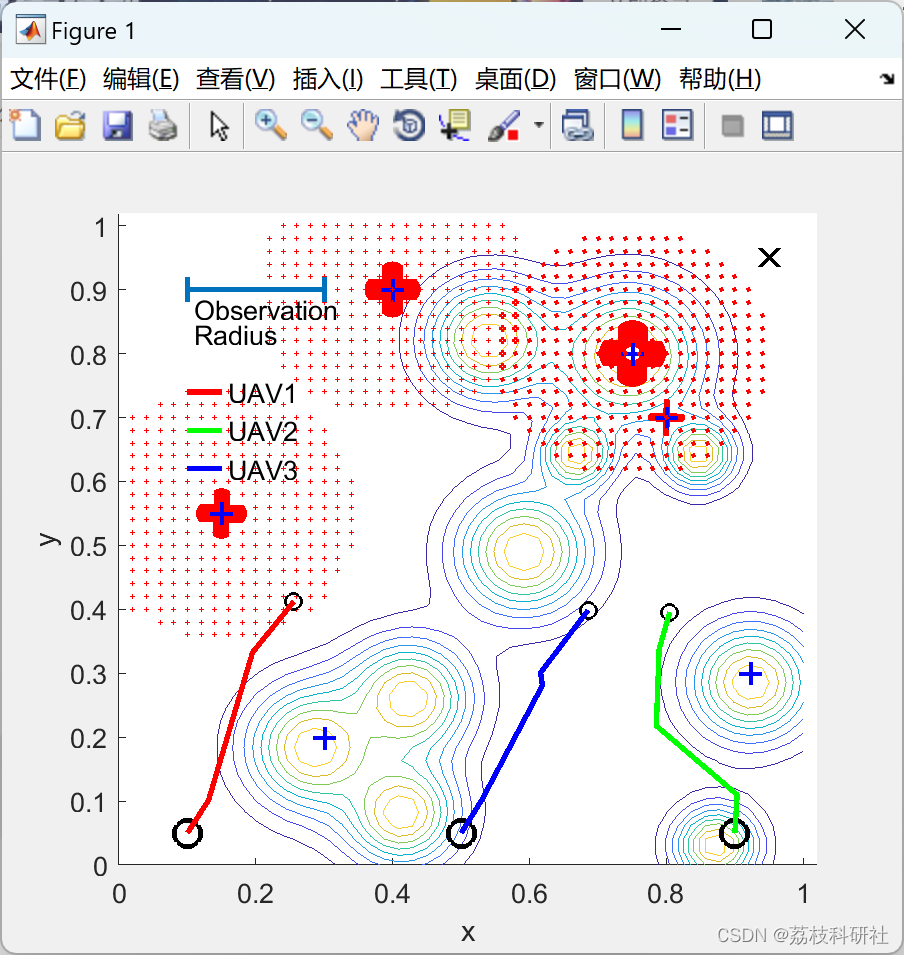
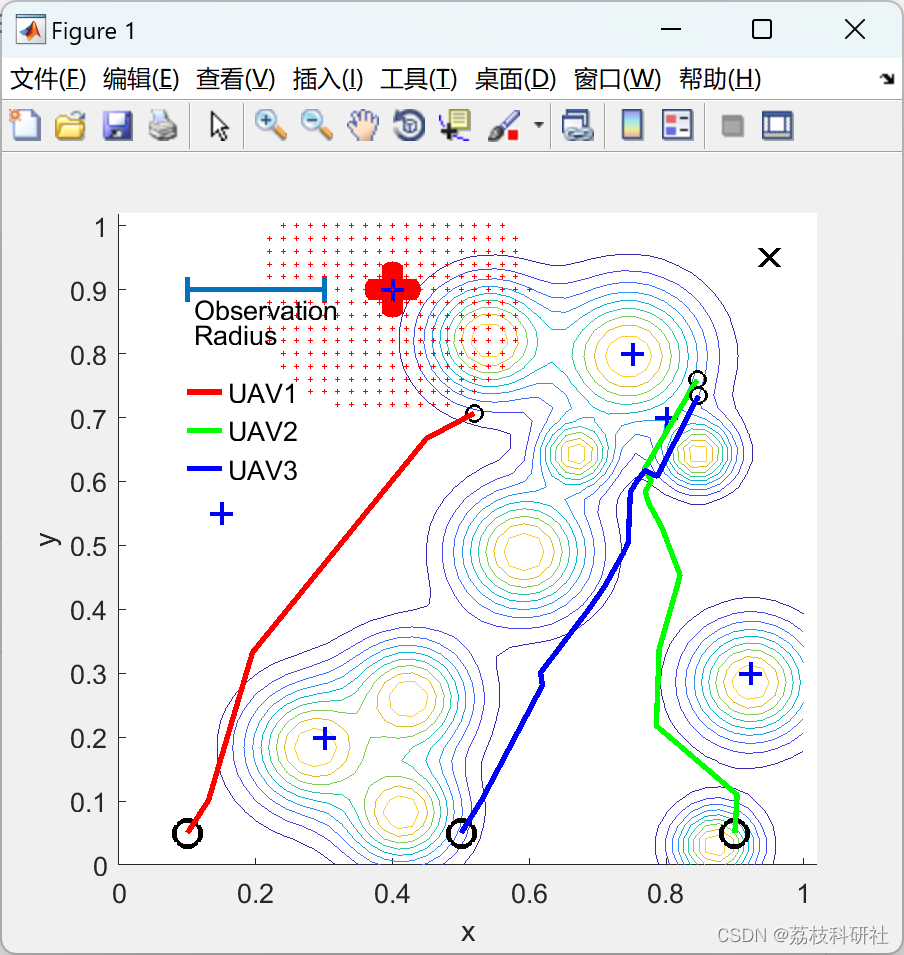
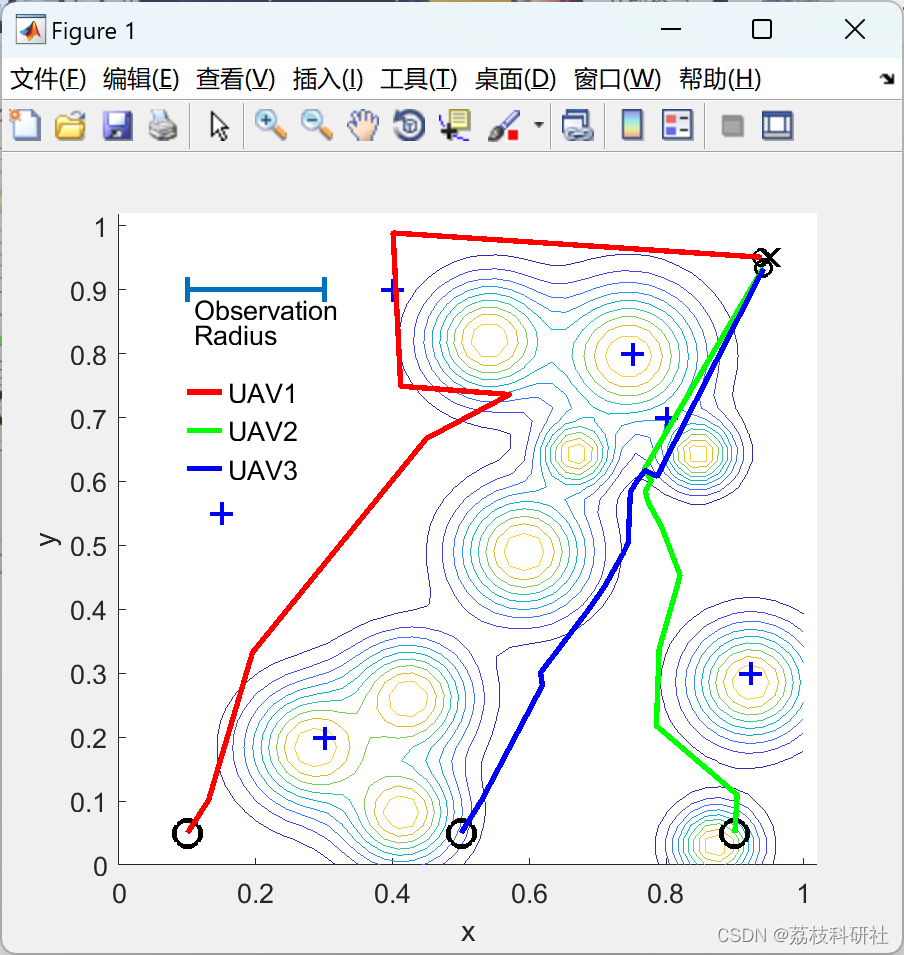
%% draw UAVs path
UAV_info = UAV_initialize;
for i=1:UAVnum
tr=cat(1,UAV_info(i,1:2),traceRecord{i});
trSize=size(tr,1);
plot(tr(trSize,1),tr(trSize,2),'ko','LineWidth',1,'MarkerSize',6); %end point
plot(tr(1,1),tr(1,2),'ko','LineWidth',2,'MarkerSize',10); %start point
if i==1
c='r';
elseif i==2
c='g';
else
c='b';
end
plot(tr(:,1),tr(:,2),'Color',c,'LineWidth',2);
line([0.1 0.15],[0.8-i*0.06 0.8-i*0.06],'Color',c,'LineWidth',2)
text(0.16,0.8-i*0.06,"UAV"+i); % UAV legend
end
plot(TARGET2plot(1),TARGET2plot(2),'kx','LineWidth',2,'MarkerSize',10); %target point
%% observation radius legend
line([0.1 0.3],[0.9 0.9],'LineWidth',2)
line([0.1 0.1],[0.88 0.92],'LineWidth',2)
line([0.3 0.3],[0.88 0.92],'LineWidth',2)
text(0.11,0.87,'Observation')
text(0.11,0.83,'Radius')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]徐应杰. 基于地面协同的无人机移动边缘计算系统的研究[D].南昌大学,2022.DOI:10.27232/d.cnki.gnchu.2022.004047.
[2]戴龙斌. 多无人机辅助移动边缘计算的加权能耗最小化研究[D].南昌大学,2022.DOI:10.27232/d.cnki.gnchu.2022.004314.


















 1353
1353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











