






 本文探讨了无人机机队的模拟方法,涉及系统建模、任务规划、Matlab代码示例,展示了如何在多无人机协作中使用编程技术优化任务执行和性能。
本文探讨了无人机机队的模拟方法,涉及系统建模、任务规划、Matlab代码示例,展示了如何在多无人机协作中使用编程技术优化任务执行和性能。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
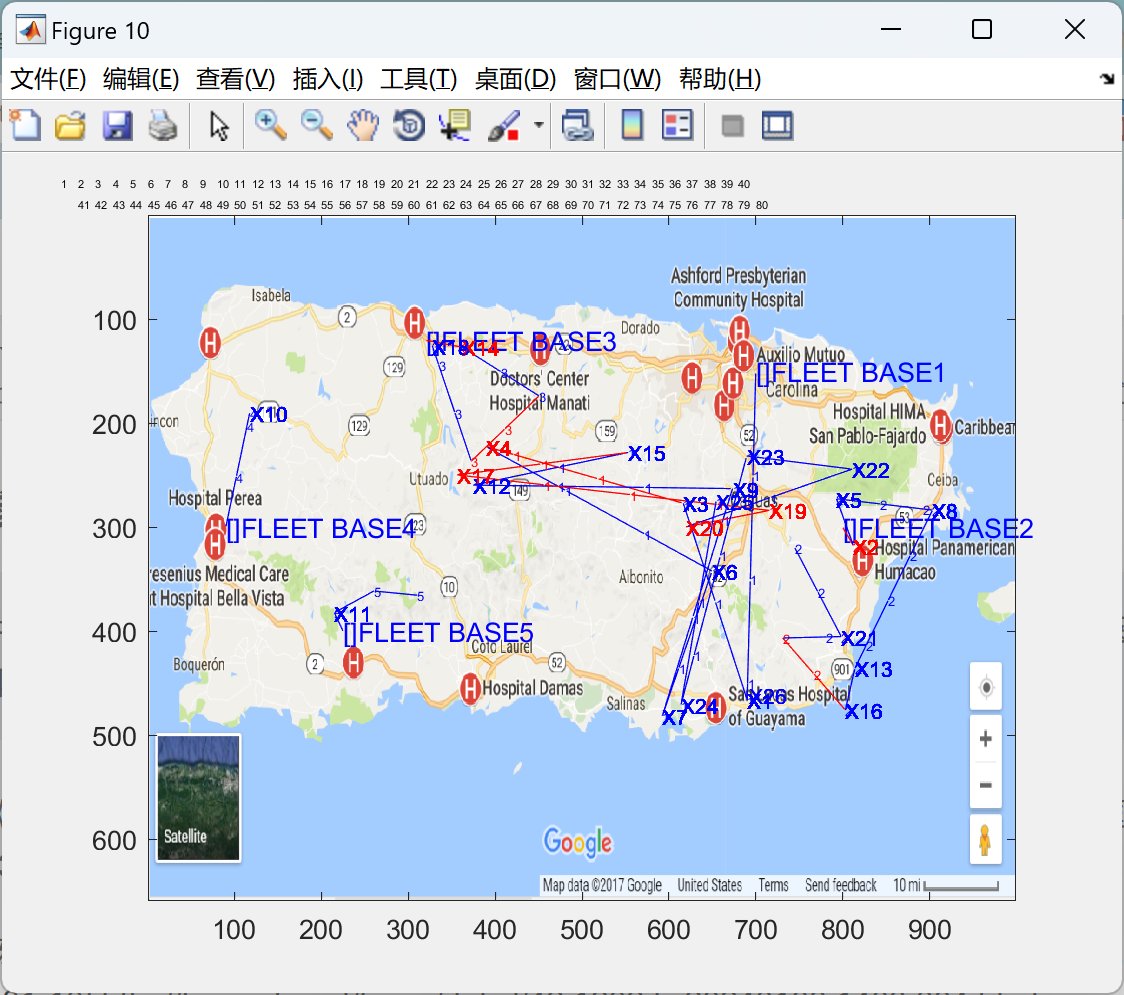
无人机机队的模拟是指利用计算机程序或仿真工具对无人机机队的行为进行建模和模拟。这种模拟通常涉及多个无人机之间的协同作战、任务执行或航行控制等方面的行为。首先,需要对无人机系统进行建模,包括每架无人机的特性、动力学模型、传感器能力、通信设备以及任务执行能力等。这些模型可以基于物理原理、实验数据或先前的研究成果进行构建。定义无人机机队的任务和目标,包括任务类型、执行路径、时间约束等。任务规划也可能涉及到任务分配、路径规划、资源分配等方面的决策。无人机机队的模拟可以帮助研究人员和工程师更好地理解和优化无人机系统的行为,提高其在各种任务和应用中的性能和可靠性。
📚2 运行结果



 主函数部分代码:
主函数部分代码:
PRFleet.base(5*(i-1)+5,1)=225clear all; close all; format long;
simdata='UAV.xlsx'; %% where output data is recorded
%% SIMULATION PARAMETERS
numsim=10; %% number of simulations
steps=80; %% total number of time steps in simulation
deltat=15; %% time increment reprsented by 1 step (in minutes)
k=1/3; %% mean steps between requests is 1/k
lospeed=50; %% slower UAV speed (pixel/time step)
hispeed=100; %% faster UAV speed
for n=1:numsim %% Main loop to execute simulation run #n
day(1,n)=n;
clear requestTime
%% Create Map
figure
MAP=imread('PuertoRico.png'); image(MAP); axis=[0 900 100 450]; hold on;
rect=[150 200 400 150];
%% Create new UAV fleet
clear PRfleet;
PRFleet=fleetManager; %% manages Puerto Rico UAV fleet
PRFleet.map='PuertoRico.png'; %% UAV Fleet is deployed to Puerto Rico
PRFleet.numUAVS=5; %%Size of UAV fleet
PRFleet.hiSpeedUAVS=1; %% Number of Hi-Speed UAVs
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]Wang X ,Zhao J ,Pei X , et al. Bioinspiration review of Aquatic Unmanned Aerial Vehicle (AquaUAV)[J]. Biomimetic Intelligence and Robotics,2024,4(2).
[2]朱启梦,孙金华,杨柳,等.基于无人机倾斜摄影的三维绿量估算[J/OL].河南科学:1-11[2024-04-20].http://kns.cnki.net/kcms/detail/41.1084.N.20240417.1831.002.html.

















 293
293











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











