









Linux驱动开发
c代码——>目标文件————>最终目标文件
驱动 ,ko文件 uimage:内核二进制文件
成为内核不可分割的部分
ko:kernel object:模块(独 立),分离,灵活度高,模块化,易于管理,减小内核体积)
编写代码----编译ko(前提,内核先编译)------装载模块insmod(系统先要运行,ko是运行在内核态,装载的时候是在用户态)
*1. 编译驱动的准备工作:
-
内核:管理工作(设备,文件,网络,内存,进程) www.kernel.org (linux-3.14.tar.xz) 放到ubuntu下 加压Linux内核 a,编译内核 tar -zxvf linux-3.14.tar.xz 步骤: 1,设置交叉工具链-----uimage也云心arm开发板 vim Makefile ARCH=arm CROSS_COMPLE=arm-none-linux-gnueabi- 2,选择一个soc ,可以支持很多平台,所以要挑出对我们平台的代码 make exynos_defconfig //cp -raf arch/arm/configs/exynos_defconfgi .config 3,make menuconfig 内核裁剪,产生一个图形界面 system typ------>s3c uart to use for low-level messages将数值改为2 *标识编译到内核中 4,make uimage -j2(双线程编译),编译内核 //如果编译报错:缺少mkimage sudo cp -raf mkimage /usr/bin/ sudo chmod 777 /usr/bin/ 重新在make uimage 5,编译设备树文件----描述设备信息--最终编译成dtb 以一个默认的设备树文件为参考,变成我们自己想要的dts文件 arch/arm/boot/dts$ cp exynos4412-origen.dts exynos4412-fs4412.dts arch/arm/boot/dts$ vim Makefile 70行 添加 exynos4412-fs4412.dtb \ 回到内核源码顶层目录: Linux-3.14$ make dtbs 使用uimage和dtb文件 cp -raf arch/arm/boot/uimage /tftpboot cp -raf arch/arm/boot/dts/exynos4412-fs4412.dtb /tftpboot 内核崩掉了,需要网卡的移植 移植dm9000 实际上是设备树文件的修改: vim arch/arm/boot/dts/exynos4412-fs4412.dts 添加如下内容: srom-cs1@50000000{ compatible="simple="simple-bus"; #address-cells=<1>; #size-cells=《1? reg=<0x5000000 0x10000000> ranges; ethrenet@5000000{ compatible="davocom ,dm9000"; reg=<0x5000000 0x2 0x5000004 0x2> inrerrupts=<6 4> davicom,no-eeprom; mac-address-[00 0a 2d a6 55 a2]; }; }; 保存退出后,需要再次编译dts文件 make dtbs 然后cp -raf arch/arm/boot/dts/exynos4412-fs4412.dtb /tftpboot/ 配置内核:make menuconfig 进入图形配置界面 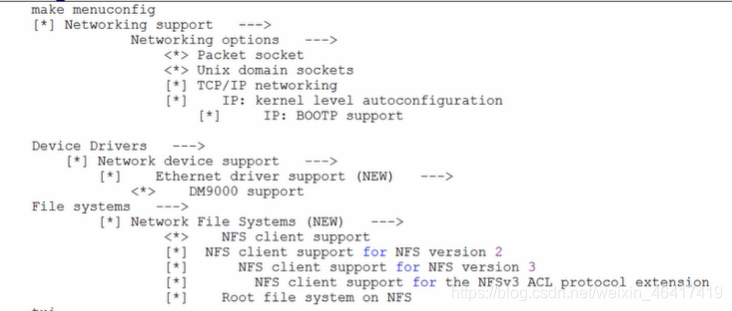 退出时要保存 再次编译内核:make uimage -j2 cp -raf arch/arm/boot/uimage /tftpboot cp -raf arch/arm/boot/dts/exynos4412-fs4412.dtb /tftpboot
开发板中的在uboot设置中,添加一个参数clk_ignore_unused
set bootargs console=ttySAC,115200 int=/linuxrc root=/dev/nfs rw nfsroot rw nfsroot=192.168.7.21:/opt/4412/rootfs ip=192.168.7.22 clk_ignore_unused
重新启动开发板
b,编写驱动代码
source sight(看代码的工具)
环境搭建/烧录镜像和工具/si_linux3.14-ori.tgz
解压到内核源码的顶层目录:
tar -xvf si_linux3.14-ori.tag
在source insght里去写
驱动代码需要有四个部分:头文件,驱动模块装载和卸载函数入口到声明,事项模块装载和卸载入口,GPL的声明
#include <linux/init.h>
#include<linux/module.h>
static int __init hell0_drv_init(void)
{
//一般做系统申请资源
printk(“---------------%s----------------\n”,FUNCTION);;
return 0;
}
static void _exit hello_drv_exit(void)
{
一般做系统释放资源
prink(“-------------------%s-----------------------\n”,FUNCTION);
}
module_init(hello_drv_init);
module_exit(hello_drv_exit);
MODULE_LICENSE(“GPL”);
~
~
~
c,编译驱动代码---Makefile((被读取两次:make 2,内核源码中Makefile)
ROOTFS_DIR=/opt/4412/rootfs
ifeq ($(KERNELRELEASE),)
#内核源码的路径,不通环境会不样,内核源码一定要先编译
KERNEL DIR=/home/george/linux_4412/kernel/linux-3.14
CUR_DIR=$(shell pwd)
all:
make -C $(KERNEL_DIR) M=$(CUR_DIR) modules
clean:
make -C
(
K
E
R
N
E
L
D
I
R
)
M
=
(KERNEL_DIR) M=
(KERNELDIR)M=(CUR_DIR) clean
install:
cp -raf *.ko $(ROOTFS_DIR)/drv_module
else
#用于指定到底编译的是哪个代码----hello.c
obj-m+=hello.o
endif
~
~
~
insmod hello.ko 加载模块
lsmod
rmmod hello 卸载模块
驱动模块的开发:
1,参数传递
加载ko: insmod hello.ko myname="geroge " myvalue=77
用途:WiFi驱动,WiFi硬件中内部也运行内部的代码,原厂开发,这些代码叫做固件—fireware.bin
装载WiFi驱动,必须告诉固件的头文件在哪里
insmod rtxxx.ko path=/lib/modules/firware/xxx.bin
在代码如何处理参数:
module_param(name,type,perm)
参数1:表示参数的名字,比如myname,myvalue
参数2:参数类型,char ,int
参数3:/sys
#include <linux/init.h>
#include<linux/module.h>
#include<linux/stat.h>
#inlcude"math.h"
static int myvalue=56;
static char myname="peter";
static int __init hell0_drv_init(void)
{
printk("--------------%s-----------------\n",__FUNCTION__);
printk("name=%s,value=%d\n",myname,myvalue);
prink("a+b=%d,a-b=%d\n",my_add(33,22),my_sub(44,22));
return 0;
}
static void _exit hello_drv_exit(void)
{
}
module_init(hello_drv_init);
module_exit(hello_drv_exit);
MODULE_LICENSE("GPL");
module_param(myvalue,int,0666);
module_param(myname,charp,S_IRUGO|S_IWUGO);
~
~
~
~
两个ko文件,一个去调用另一个里面的函数
#include<linux/module.h>
#inlcude<linux/init.h>
//不需要模块加载和卸载到入口声明,直接定义好一些封装好的函数
int my_add(int a,int b)
{
return a+b;
}
EXPORT_SYMBOL(my_sub);
int my_sub(int a,int b)
{
return a-b;
}
EXPORT_SYMBOL(my_sub);
MODULE_LICENSE("GPL");
#ifndef __MATH__H__
#define __MATH__H__
int my_add(int a,int b);
int my_sub(int a,int b);
#endif
ifeq ($(KERNELRELEASE),)
#内核源码的路径,不通环境会不样,内核源码一定要先编译
KERNEL DIR=/home/george/linux_4412/kernel/linux-3.14
CUR_DIR=$(shell pwd)
all:
make -C $(KERNEL_DIR) M=$(CUR_DIR) modules
clean:
make -C $(KERNEL_DIR) M=$(CUR_DIR) clean
install:
cp -raf *.ko $(ROOTFS_DIR)/drv_module
else
#用于指定到底编译的是哪个代码----hello.c
obj-m+=hello.o
obj-m+=math.o
endif
先导进去:insmod math.ko
然后:ls /sys/module/math
insmod hello.ko 出现结果
注意:一个驱动调用另一个驱动,必须先将被调用的驱动进行装载














 849
849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









