







1,群的性质
群(Group):一种集合 + 一种运算 的代数结构。把集合记作A,运算记作.,群可记作G =(A,.)。能否成群需要满足以下几个性质:
(1).封闭性:
∀
\forall
∀a1,a2
∈
\in
∈A, a1
⋅
\cdot
⋅ a2
∈
\in
∈A
(2).结合律:
∀
\forall
∀a1,a2,a3
∈
\in
∈A, (a1
⋅
\cdot
⋅a2)
⋅
\cdot
⋅a3 = a1
⋅
\cdot
⋅(a2
⋅
\cdot
⋅a3)
(3).幺元:
∃
\exists
∃a0
∈
\in
∈A, s.t
∀
\forall
∀a
∈
\in
∈ A, a0
⋅
\cdot
⋅a = a
⋅
\cdot
⋅a0 =a.
(4).逆:
∀
\forall
∀a
∈
\in
∈A,
∃
\exists
∃a-1
∈
\in
∈A, s.t a
⋅
\cdot
⋅a-1 = a0.
1,{Z,+}是群
所有的整数都属于Z,任意两整数相加还是整数还是属于Z集合,满足了封闭性。
整数的加法满足结合律
幺元 满足整数集合加法成群的幺元是0,因为0加任何整数都等于整数本身。
整数对应的负值是该整数的逆,因为整数加该整数的负数等于0 ,0就是幺元,而且还属于该集合
以上四条都满足成群的要求,所以{Z,+}成群。
2,{N,+}不是群
找不到集合中的一个元素满足幺元的性质,即无幺元
同样也找不到唯一的一个元素满足逆的性质,即无逆
所以{N, +}不成群
3,阿贝尔群:又称为交换群或加群,是这样一类群:
它由自身的集合G和二元运算*构成。它除了满足一般的群公理,G有单位元,所有G的 元素都有逆元之外,还满足交换律和结合律,群元素乘积的值与乘法运算的次序无关。
矩阵一般不形成在乘法下的阿贝尔群,因为矩阵的乘法一般是不可交换的,即元素乘积的值和乘法的运算次序有关。
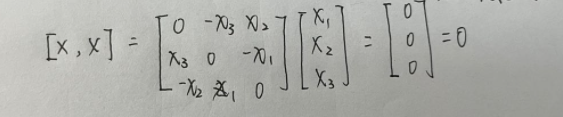
3,验证向量叉乘的李代数性质

1,封闭性:X,Y是集合V= R3中的任意两个向量元素 ,[X,Y]运算,表示将X向量与Y向量相称,由于X是三维的列向量,Y也是三维的列向量,两个同维度的向量作叉积,相当与X对应的反对称矩阵点乘向量Y,得到的值仍是一个3 x 1 的列向量,仍属于集合V
2,双线性:

3,自反性:
4,雅可比等价:

3,推导S(3)的指数映射


4,伴随

由https://math.stackexchange.com/questions/
2190603/derivation-of-adjoint-for-so3可知:

5,常见函数的求导应用

扰动模型:对R进行一次扰动
Δ
\Delta
ΔR,看结果相对于i扰动的变化率。这个扰动可以乘在左边也可以乘在右边。扰动
Δ
\Delta
Δ对应的李代数为
Ψ
\Psi
Ψ


6,轨迹的描述

(1),在画轨迹的时候,我们可以把“”轨迹“画成一系列点组成的序列,其实就是机器人(相机)坐标系的原点在世界坐标系中的坐标,机器人坐标系的原点为OR,此时OW就是这个原点在世界坐标系下的坐标:
OW = TWR * OR = tWR这正是TWR的平移部分。因此可以直接从TWR中看出相机在何处。
(2),实现代码如下:
#include <sophus/se3.hpp>
#include <vector>
#include <string>
#include <iostream>
#include <fstream>
#include <Eigen/Core>
#include <unistd.h>
#include <pangolin/pangolin.h>
using namespace std;
using namespace Eigen;
string trajectory_file = "../trajectory.txt";
void DrawTrajectory(vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>>);
int main(int argc, char **argv)
{
vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> pose;
ifstream fin(trajectory_file);
if(!fin) {
cout << "cannot find trajectory file at" << trajectory_file << endl;
return 1;
}
while(!fin.eof())
{
double time,tx,ty,tz,qx,qy,qz,qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Vector3cd t(tx, ty, tz);
Quaterniond q(qw, qx, qy, qz);
Sophus::SE3d SE_qt(q, t);
pose.push_back(SE_qt);
}
cout << "read total " << pose.size() << "pose entries" << endl;
DrawTrajectory(pose);
return 0;
}
void DrawTrajectory(vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> pose)
{
if(pose.empty())
{
cerr << "Trajectory is empty!" << endl;
return ;
}
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768); //创建一个窗口
glEnable(GL_DEPTH_TEST); //启动深度测试
glEnable(GL_BLEND); //启用混合
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA); //混合函数 GL_SRC_ALPHA是源混合因子,GL_MINUS_SRC_ALPHA 是目标混合因子;
// //定义投影和初始模型视图矩阵
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) //对应的是gluLookAt,摄像机位置,参考点位置,up vector(上向量)
);
// //看SimpleDisplay中的边界的设置
pangolin::View &d_cam = pangolin::CreateDisplay().SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f/768.0f).SetHandler(new pangolin::Handler3D(s_cam)); //在窗口中创建交互式视图
while(pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT || GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for(size_t i = 0; i < pose.size() - 1; i++) {
glColor3f(1 - (float)i / pose.size(), 0.0f, (float)i / pose.size());
glBegin(GL_LINES);
auto p1 = pose[i], p2 = pose[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000);
}
}
CMakeLists.txt内容:
project(trajectory)
cmake_minimum_required(VERSION 3.16.3)
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
find_package(Sophus REQUIRED)
include_directories("/usr/local/include/eigen3")
set(Sophus_LIBRARIES "/usr/local/lib/libSophus.so")
include_directories( ${Sophus_INCLUDE_DIRS})
add_executable(draw_trajectory draw_trajectory.cpp)
target_link_libraries(draw_trajectory ${Sophus_LIBRARIES})
target_link_libraries(draw_trajectory ${Pangolin_LIBRARIES})
效果:

7,轨迹的误差

实现代码:
#include <iostream>
#include <fstream>
#include <unistd.h>
#include <pangolin/pangolin.h>
#include <sophus/se3.hpp>
using namespace std;
using namespace Eigen;
using namespace Sophus;
string groundtruth_file = "../groundtruth.txt";
string estimated_file = "../estimated.txt";
typedef vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType;
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti);
TrajectoryType ReadTrajectory(const string &path);
int main(int argc, char **argv[])
{
TrajectoryType groundtruth = ReadTrajectory(groundtruth_file);
TrajectoryType estimated = ReadTrajectory(estimated_file);
assert(!groundtruth.empty() && !estimated.empty()); //assert() 断言,如果括号内表达式的结果为真,则不做任何操作,如果为假,assert()就会报错,并终止程序的执行,错误输出结果为表达式,所在文件,行数
assert(groundtruth.size() == estimated.size());
double rmse = 0;
for(size_t i = 0; i < estimated.size(); i++)
{
Sophus::SE3d p1 = estimated[i], p2 = groundtruth[i];
double error = (p2.inverse() * p1).log().norm(); //norm() 范数,为空间中所有的向量赋予了非零的正长度或大小
rmse += error * error;
}
rmse = rmse / double(estimated.size());
rmse = sqrt(rmse);
cout << "RMSE:" << rmse << endl;
DrawTrajectory(groundtruth, estimated);
return 0;
}
TrajectoryType ReadTrajectory(const string &path)
{
ifstream fin(path);
TrajectoryType trajectory;
if(!fin) {
cout << "trajectory " << path << "not found ." << endl;
}
while(!fin.eof()) {
double time , tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Vector3d t(tx, ty, tz);
Quaterniond q(qw, qx, qy, qz);
SE3d SE_qt(q, t);
trajectory.push_back(SE_qt);
}
return trajectory;
}
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti)
{
pangolin::CreateWindowAndBind("Trajectory Viewer" , 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
//参数依次为相机的图像高度,宽度,四个内参以及最近和最元视距
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
//参数依次为相机所在位置,以及相机所看的视点位置(一般会设置在原点)
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
//创建一个交互视图,用于显示上一部摄像机所“拍摄”到的内容
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f) //参数依次表示为视图在视窗中的范围(下,上,左,右)
.SetHandler(new pangolin::Handler3D(s_cam));//交互相机视图句柄
while(pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for(size_t i = 0; i < gt.size() - 1; i++)
{
glColor3f(0.0f, 0.0f, 1.0f);
glBegin(GL_LINES);
auto p1 = gt[i], p2 = gt[i+1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);//3D平移、
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for (size_t i = 0; i < esti.size() - 1; i++) {
glColor3f(1.0f, 0.0f, 0.0f); // red for estimated
glBegin(GL_LINES);
auto p1 = esti[i], p2 = esti[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000);
}
}
CMakeLists.txt内容:
cmake_minimum_required(VERSION 3.16.3)
project(TrajectoryError)
find_package(Pangolin REQUIRED)
find_package(Sophus REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
include_directories(${Sophus_INCLUDE_DIRS})
add_executable(trajectoryError trajectoryError.cpp)
target_link_libraries(trajectoryError ${Pangolin_LIBRARIES} ${Sophus_LIBRAREIS})
实现效果:
















 286
286











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









