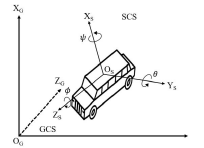
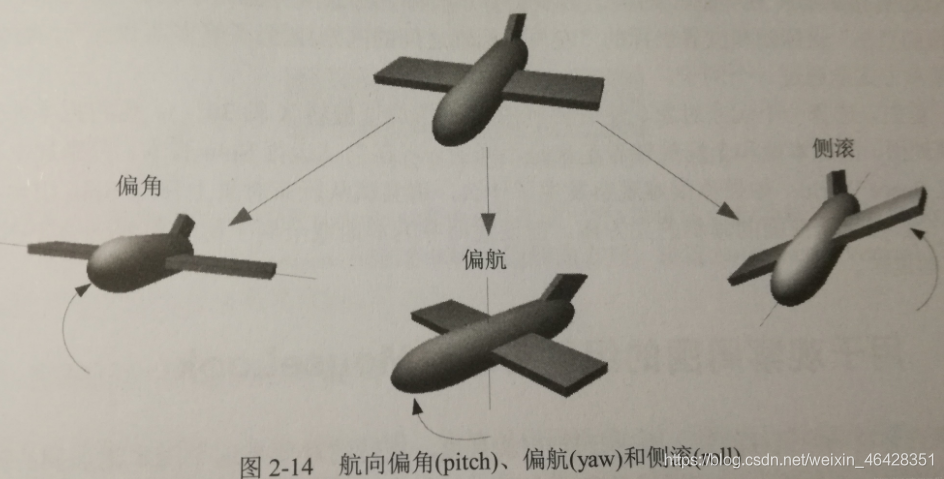
偏航角、俯仰角、滚动角 在姿态估计中,常常会提到三个概念,就是偏航角、俯仰角和滚动角。姿态估计是物体在三维空间内方向的表征。通常描述物体姿态以大地作为参考系(标准坐标系)。将世界坐标系(GCS)转换为场景坐标系(SCS)时物体绕场景坐标系的三个坐标轴转过的角度就是三维姿态角偏航角、俯仰角和滚动角。 1.偏航角 定义:实际航向与计划航向的夹角,向右偏为正。 2.俯仰角 定义:机体轴与地平面之间的夹角。飞机抬头为正。 3.滚动角 定义:物体绕前后轴线转动的角度。向右转动为正。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 姿态估计中的关键概念包括偏航角、俯仰角和滚动角,它们描述了物体在三维空间中的方向。偏航角指实际航向与计划航向的夹角,向右为正;俯仰角是机体轴与地平面的夹角,抬头为正;滚动角则是物体绕前后轴转动的角度,向右为正。这些角度在航空航天、机器人和自动驾驶等领域中至关重要。
姿态估计中的关键概念包括偏航角、俯仰角和滚动角,它们描述了物体在三维空间中的方向。偏航角指实际航向与计划航向的夹角,向右为正;俯仰角是机体轴与地平面的夹角,抬头为正;滚动角则是物体绕前后轴转动的角度,向右为正。这些角度在航空航天、机器人和自动驾驶等领域中至关重要。

 3.滚动角
3.滚动角

















 786
786





