






文章目录
概要
在ubuntu上跑slam14讲的代码自然很方便,主要是有apt-install,但是在windows上我也是才发现个宝藏,那就是vcpkg。
最近在跑slam14讲ch6时,发现要安装g2o库,自己cmake的话我没弄好,巨麻烦
但是好在发现了vcpkg
你可以把vcpkg看作是windows的命令行安装,安装方法我就不提了,最后把.\vcpkg.exe的目录给到系统path里就行了,
然后
vcpkg install g2o:x64-windows
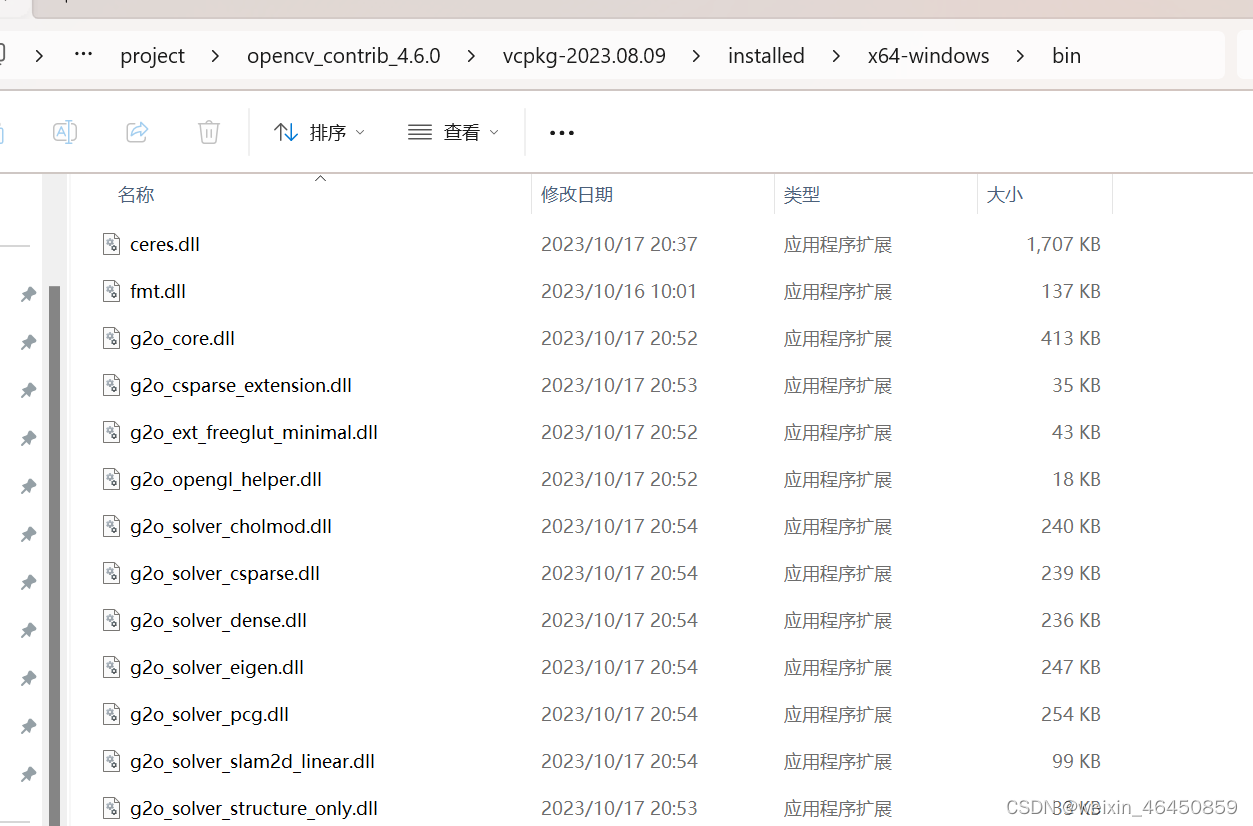
他就会在vcpkg安装目录下,创建installed/x64-windows目录
目录下有bin include lib等文件夹,
然后还需要执行
vcpkg integrate install
就是把这些目录给到vs2019,让他自己去找这些依赖目录
而且更绝的是在cmakelists.txt里面,你不要在find_pack(g2o)了,你需要做的仅仅是
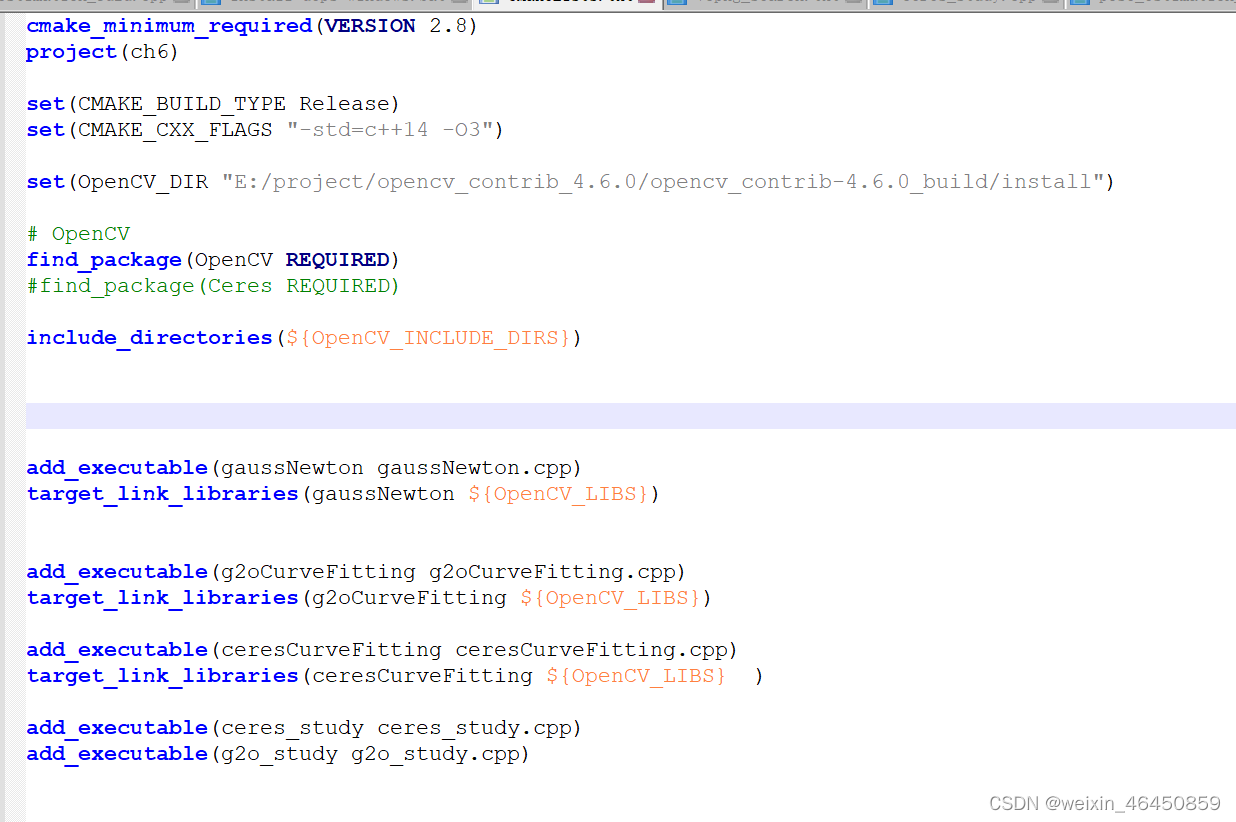
当然我的opencv_contrib没用vcpkg安装,因为我不太放心哈哈哈哈,所以cmakelists里面我需要find_package(opencv),,,,然后就行了,
虽然文件里面选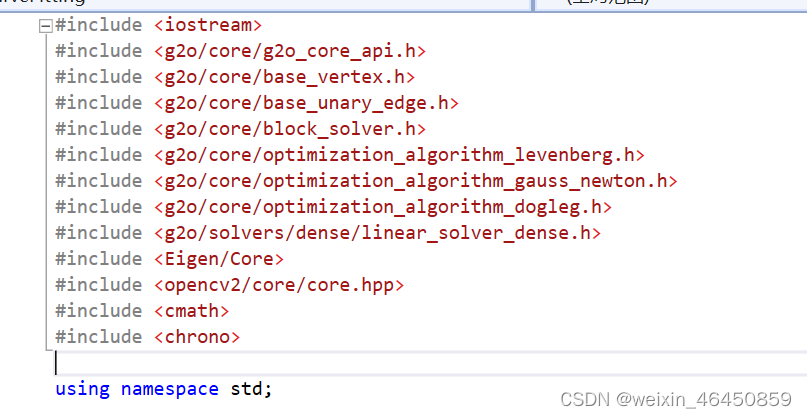
需要包含g2o库,但是vs自己会安排好。。。。。
当我在跑ch9的时候,发现了个bug
就是csparse_extension.h会报找不到cs.h
其实是要安装ceres[suitesparse]:x64-windows
然后把
#include <cs.h>
改成
#include <suitesparse/cs.h>
















 1485
1485











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











