






一体化关节模组是什么
1.0 定义
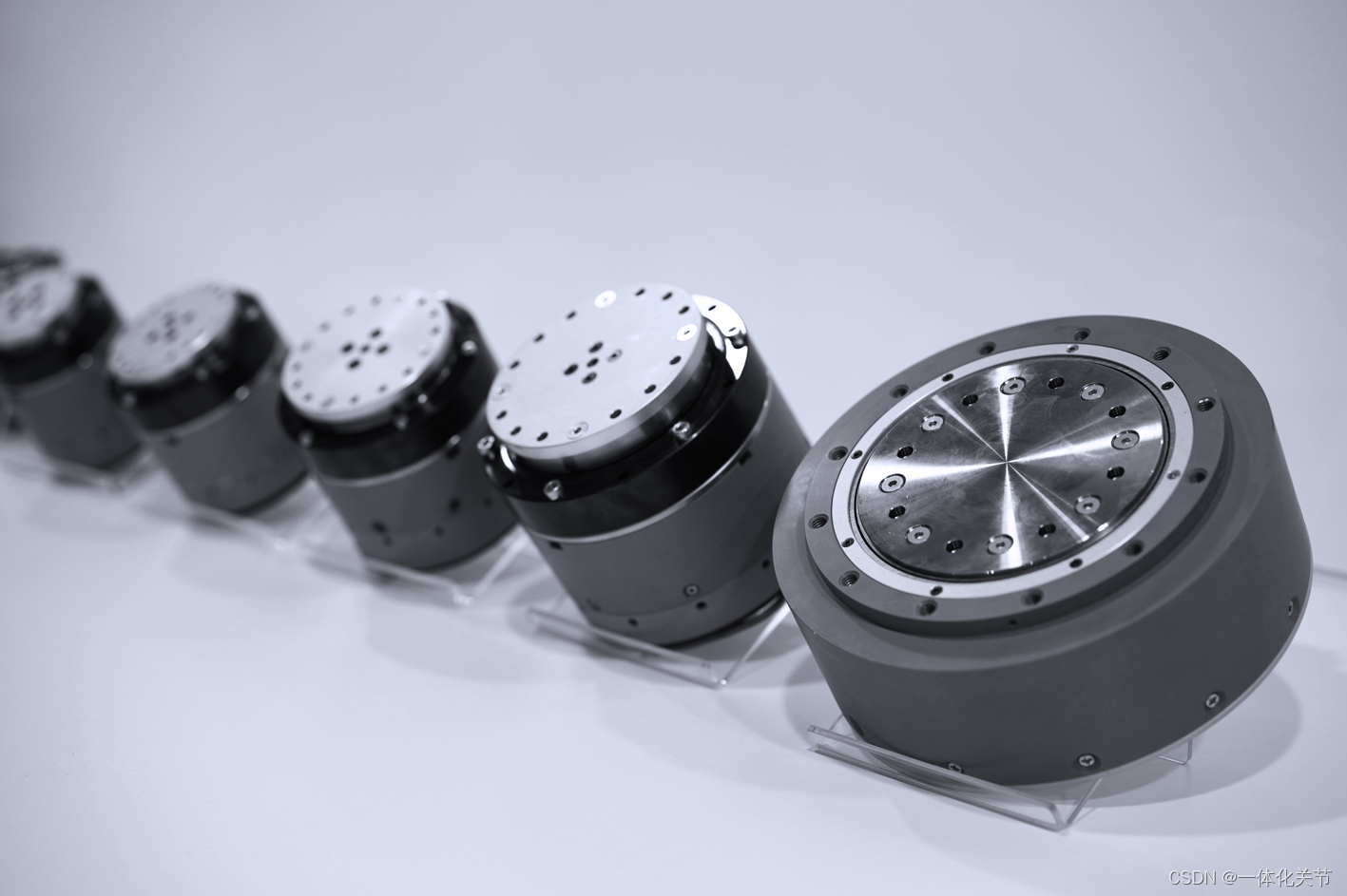
一体化关节模组是一种高度集成化的机器人关节组件,它将伺服驱动器、无框力矩电机、减速器(谐波、行星、滚柱丝杠)、编码器等关键部件集成在一个模块中。
据证券财报调查,它占到人形机器人整机成本的70%!是人形机器人最贵的零部件!
2.0 优点
2.1 高度集成化
这种设计可以简化机器人的组装过程,降低配套设备的重量,同时提高机器人的灵活性和精确度。
2.2 模块化
一体化关节模组通常也具备模块化特性,使得它们可以自由组合,形成多自由度的机械臂或服务机器人的内骨架。
2.3 缩短工期降本
一体化关节模组的设计还有助于减少对机械选型和组装环节的人员和时间投入,简化供应链管理及质量管理综合成本,从而实现机器人产品的快速上市。
2.4 功能特点
具有专利技术,例如高精度扭矩反馈、吸收动态冲击及储能的功能。
3.0 结论
我接下来向大家逐一介绍介绍一体化关节模组的组件,驱动器、无框力矩电机、谐波减速器、行星减速器、滚柱丝杠和线性关节、编码器和力矩传感器。大家感兴趣的可以点赞关注。如果对一体化关节和四足机器人感兴趣,也可以私信我购买或发您产品手册。

















 630
630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









