






当我们惊叹于人形机器人的流畅动作时,很少有人注意到,技术突破的关键藏在那些精密的关节模组之中。在人形机器人研发领域,关节模组是机器人实现灵活运动、负载承载和精准控制的核心部件,堪称机器人的“肌肉与骨骼”,其性能直接决定了机器人的灵活性、负载能力和运动精度。要理解人形机器人关节模组的真正价值,我们不仅要拆解它的技术内核,还要厘清选型逻辑,更需预见它未来的进化路径。
关节模组:机器人运动的“动力心脏”
人形机器人关节模组是集驱动、传动、传感与控制于一体的精密部件,其功能类似于生物体内的肌肉骨骼系统,负责驱动和控制机器人各个关节和部件的运动。通过电机提供动力,经减速器变速增扭后,由编码器反馈位置信息,最终由驱动器实现精确控制。
(一)核心性能指标
· 扭矩密度 :单位质量或体积输出的最大扭矩。例如,某关节模组质量为 2kg,输出扭矩 40N・m,则质量扭矩密度为 20N・m/kg。高扭矩密度意味着更轻量化的设计,使机器人动作更敏捷。扭矩密度的提升主要依赖于电机性能(如磁场强度、绕组优化)、减速器效率(如类型和传动效率)以及热设计(如过载能力和散热优化)、集成设计等。
· 响应速度 :从接收到指令到完成动作的时间。响应速度不仅取决于电机的电气响应,还受机械响应(如传动系统刚性)和系统延迟(如传感器反馈、控制算法处理、通信延迟)的影响。
· 能效比 :是衡量其动力系统将输入能量转化为机械运动效率的关键指标,直接影响机器人的续航、 热管理和运动性能。高效能关节模组能显著提升机器人续航,降低散热需求。能效比的提升依赖于电机效率、减速机构效率以及热设计与热管理的优化。
· 精度 :包括绝对精度(目标位置偏差)、重复精度(多次定位一致性)和分辨率(最小可识别位移)。高精度关节模组可实现类似 Shadow Hand 的灵巧手部操作,其精度主要依赖于电机类型、减速器背隙、传感器分辨率以及控制算法的优化。
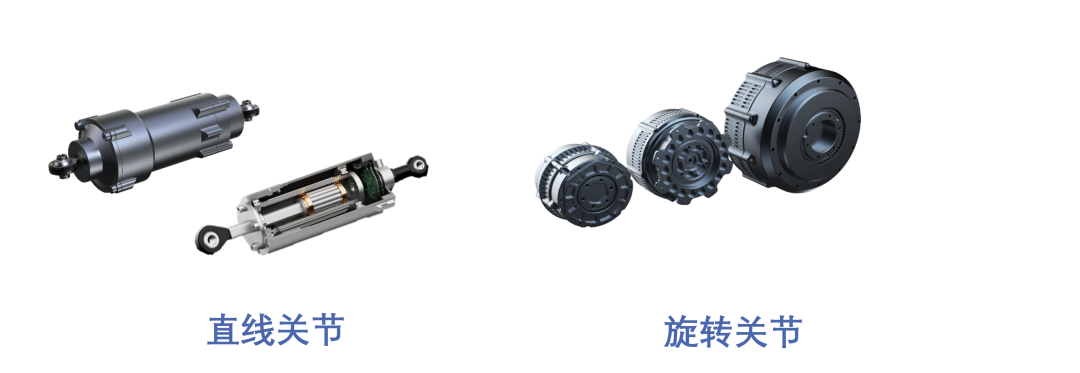
关节模组类型与应用
不同类型的关节模组在结构设计和性能表现上各具特色,适用于机器人的不同部位和功能需求。下面我们将从旋转关节和直线关节两大类别入手,详细解析各类模组的技术特点与应用场景。
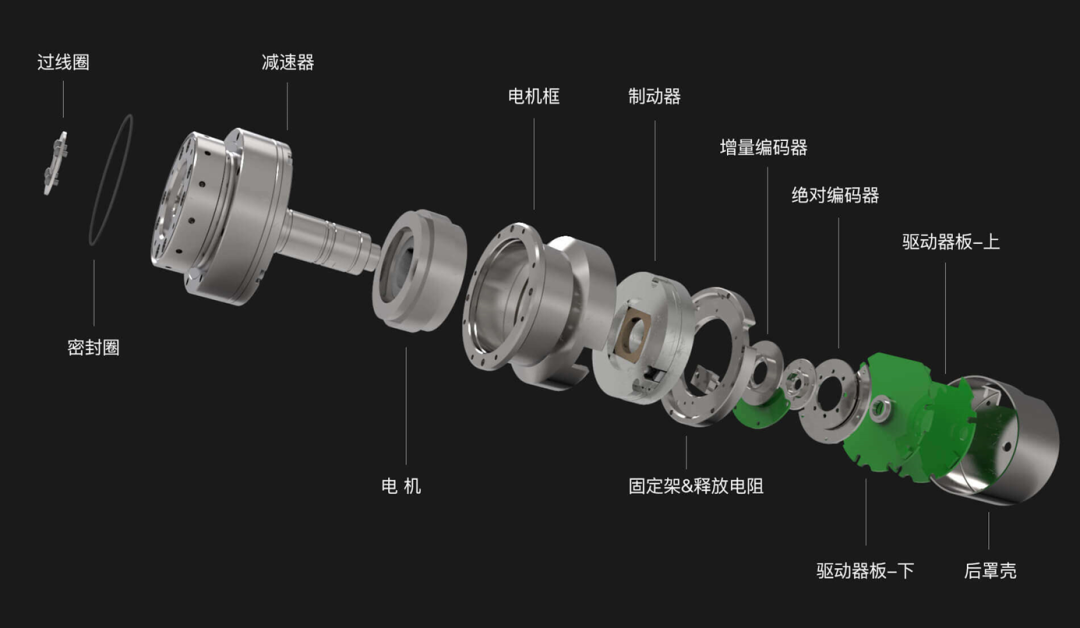
(一)旋转关节模组
· 按减速器分类 :谐波减速器以大减速比、轻量化著称,适用于手臂、腰部等需要灵活运动的部位;行星减速器刚性高,适合腿足部;RV 减速器精度高、抗冲击,常用于髋部、腿部等重负载位置。
· 按电机分类 :内转子电机响应快,外转子电机扭矩大,可根据应用场景选择。
· 按是否带抱闸分类 :带抱闸的关节模组可在断电时锁定关节位置,适用于需要静态支撑的场景,如机器臂下电后的姿态保持。
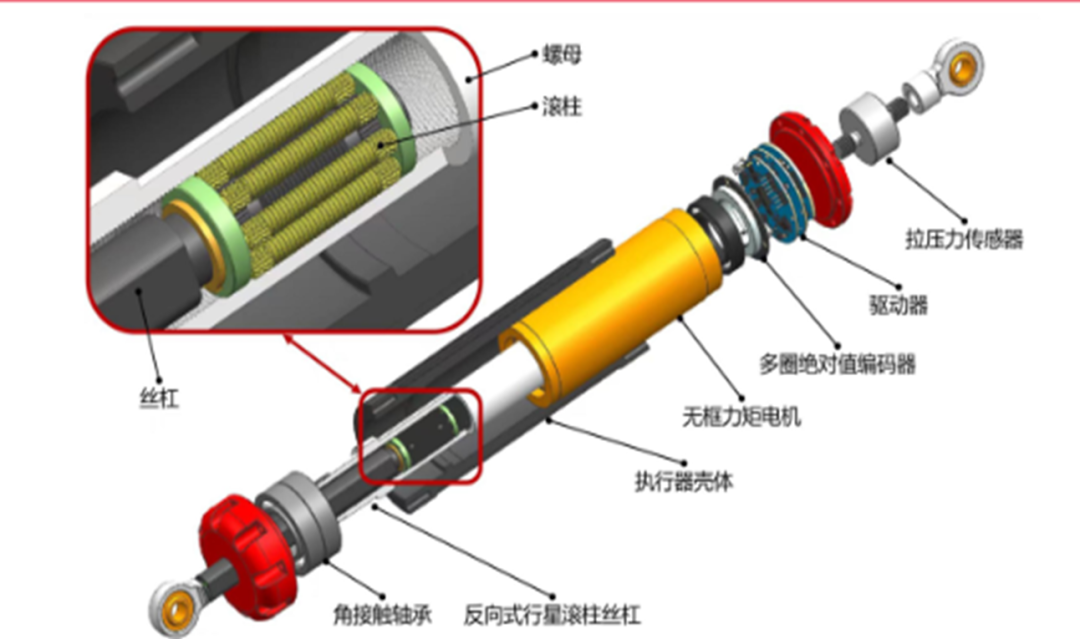
(二)直线关节模组
· 电机 + 滚柱丝杠 :高负载、耐冲击,但制造难度大,适用于腿部等重载部位。
· 电机 + 滚珠丝杠 :效率高、成本低,但负载能力有限,适合手臂、手腕等轻负载部位。
前沿创新与未来趋势
随着人形机器人向更高性能、更智能化的方向发展,关节模组技术正迎来革命性突破。新一代解决方案在传动效率、动态响应和轻量化等方面不断突破极限,为机器人赋予更接近人类的运动能力。接下来,我们可以聚焦三大前沿创新方向——准直驱关节模组、磁性齿轮传动以及轻量化材料应用,解析这些技术如何重塑人形机器人的运动性能边界。
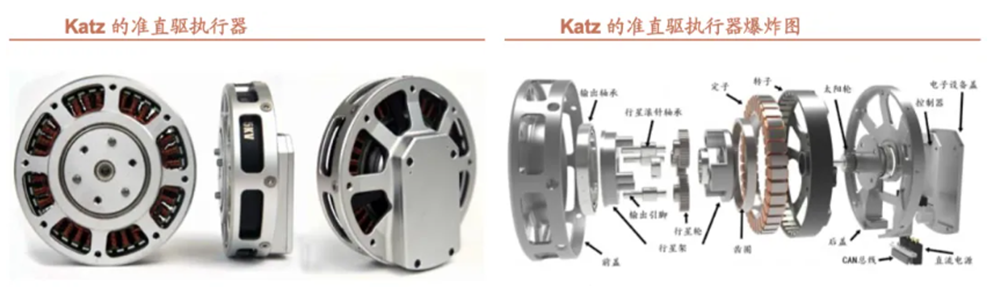
(一)准直驱关节模组
准直驱关节模组采用低减速比(3-10:1)设计,配合高扭矩密度电机,兼具快速响应与较高扭矩输出。其优势在于:
· 高动态响应:比传统高减速比系统响应更快,适合复杂运动场景。
· 高反向驱动性:由于减速比较小,关节具有较好的反向驱动能力,可实现更灵活的运动。
· 抗冲击性:相比直驱系统,准直驱通过低减速比传动提升了抗冲击能力。
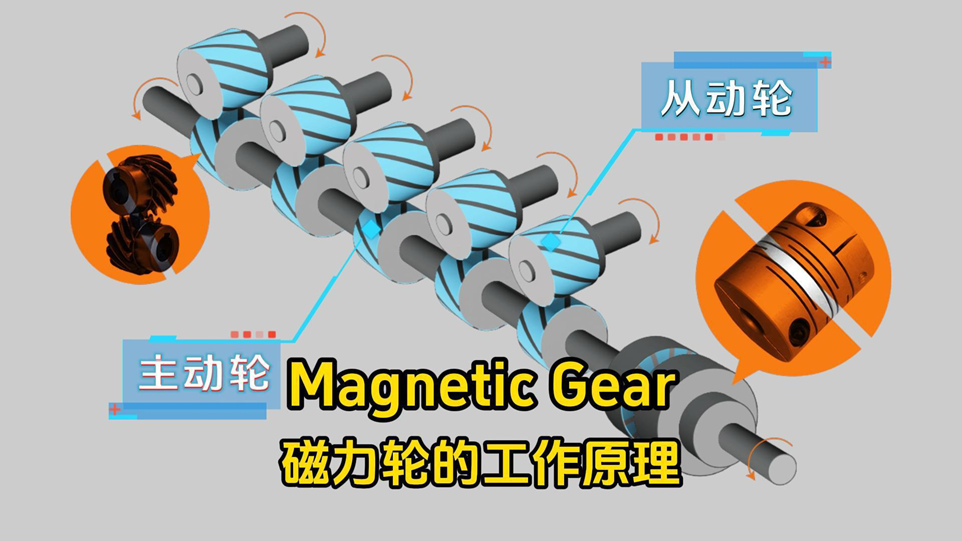
(二)磁性齿轮传动
磁性齿轮利用磁铁的吸力和斥力相互作用实现非接触式动力传递,具有以下优势:
· 免润滑:无需传统润滑剂,减少维护成本。
· 低磨损:非接触式传动显著降低机械磨损,延长使用寿命。
· 高精度:磁性齿轮可实现高精度传动,适用于精密操作场景。
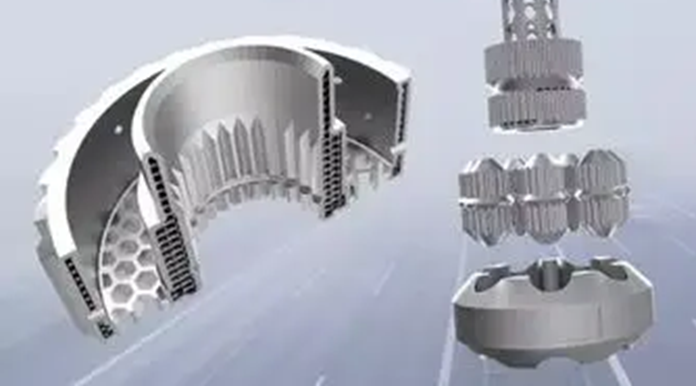
(三)轻量化材料与 3D 打印
工程塑料(如 PEEK、PTFE)、碳纤维复合材料和陶瓷材料结合 3D 打印技术,可制造复杂结构,实现关节模组极致轻量化。具体优势包括:
· 复杂几何结构:可制造镂空、内部流道等复杂结构,优化力学性能。
· 中空结构减重:通过中空设计降低关节模组重量,提升扭矩密度。
· 集成设计:将多个零件整合为单一组件,减少装配需求,提升可靠性。
选型与设计逻辑 —— 以青龙腿足系统为例
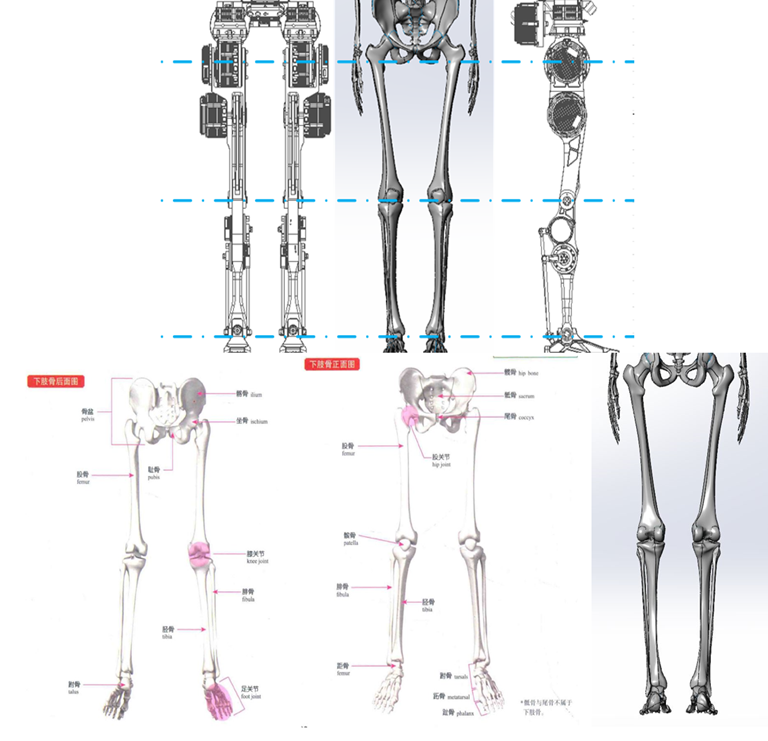
人形机器人关节模组的选型与设计绝非简单的参数堆砌,而是需要从生物力学、运动控制到工程实现的全方位系统思考。以青龙腿足系统为例,我们将完整展示从仿生学分析到工程落地的全流程设计逻辑。这个案例生动诠释了如何将理论计算转化为实际工程方案,其中关节模组的设计理念尤其值得深入探讨。
在设计青龙全尺寸通用人形机器人行走系统时,首先进行仿生步态分析,对标人体下肢骨骼比例与自由度。通过动力学仿真确定各关节扭矩需求,膝关节最大扭矩达 396N・m,峰值扭矩密度 200N・m/kg。

(一)关节模组设计
采用轴向磁通电机搭配低减速比行星减速器,实现高爆发力与快速响应。具体设计包括:
· 驱传感控一体化 :将电机、减速器、编码器和驱动器集成于一体,提升紧凑性与可靠性。
· 多自由度设计 :膝关节、踝关节等部位设计多自由度,确保机器人在复杂地形的运动灵活性。
(二)仿真与测试
在关节模组设计过程中,仿真与测试环节确保了关节模组在实际应用中的可靠性和性能表现。
动力学仿真
通过前倾倒碰撞仿真和跳跃仿真,优化关节模组的动态性能。具体而言,前倾倒碰撞仿真和跳跃仿真模拟了机器人在复杂地形和动态环境下的运动状态,分析关节模组在这些极端条件下的受力情况和响应特性,从而优化其动态性能,确保机器人能够稳定地完成各种动作。
结构件仿真
验证关节模组的强度与刚度,通过模拟高负载和冲击工况,评估关节模组的结构完整性和抗变形能力,确保其在长期使用中保持稳定性和可靠性。这一过程不仅考虑了材料的力学性能,还结合了关节模组的几何结构和实际受力分布,为设计提供了科学依据。
控制系统仿真
优化控制算法,提升关节模组的响应速度与精度。通过模拟不同的控制策略和算法,评估其对关节模组动态响应的影响,从而选择最优的控制方案。这一步骤确保了关节模组能够快速、准确地响应控制指令,实现精确的运动控制。
性能测试
对关节模组进行了一系列性能测试,包括扭矩、响应速度和精度等关键指标。这些测试不仅验证了仿真优化的结果,还确保关节模组的实际性能能够满足设计要求,为后续的系统集成提供了可靠保障。
耐久性测试
通过长时间运行测试,验证关节模组的可靠性和寿命。在模拟的实际工况下,关节模组经历了长时间的连续运行,以评估其在长期使用中的稳定性和耐久性。这一测试环节确保了关节模组在实际应用中能够保持高性能表现,为机器人系统的长期可靠运行提供了坚实的基础。

总结与展望
人形机器人的关节模组,正经历一场静默的革命——从笨重的机械传动到灵巧的仿生运动,从刚性执行到智能协同。未来,随着新材料如碳纤维复合陶瓷的突破、磁性传动等非接触技术的成熟,理想中的关节模组将褪去钢铁的厚重,披上轻盈与智慧的外衣。它们不再只是冰冷的机械部件,而是被赋予‘肌肉’的弹性、‘神经’的敏锐,在精密的扭矩与毫秒级的响应中,演绎出媲美生命的流畅。
在手术台的无影灯下、在工厂的柔性产线间、在家庭温暖的起居室里,这些进化后的关节模组将推动人形机器人跨越‘能运动’到‘会服务’的鸿沟。它们或许不会喧哗,但必将以沉默的精准,成为人类延伸肢体的‘机械交响曲’中,最不可或缺的乐章。
OpenLoong 开源社区提供了一个开放交流的平台,在这里,大家可以共同探讨机器人仿真的难点与创新点。本次技术稿件也将在开源社区进行共享,欢迎大家点击 【新提醒】人形机器人关节模组的介绍与选择 - 活动召集 开发者论坛 - OpenLoong 下载稿件PDF,一起进行交流。

















 874
874

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









