







导读:传统的PI参数的整定的方法就是从传递函数入手。对矢量控制中的电流环而言,把物理对象的三阶近似模型辨识出来,然后用PID参数抵消或削弱最大一个或者两个极点的影响就可以了。
需要本期文章中的PI参数具体的文档和仿真模型,可关注微信公众号:浅谈电机控制,获取。
一、PI参数整定的一般步骤
- 列出电流环的开环传递函数、闭环传递函数;
- 利用零极点对消的设计思想消去大惯性环节;
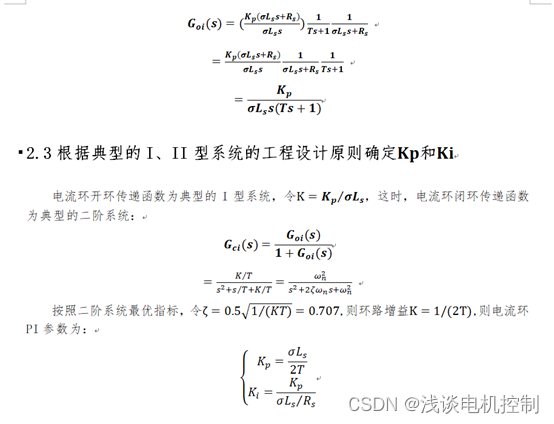
- 然后根据典型的I、II型系统的工程设计原则确定Kp和Ki;
- 滤波时间常数的确定也是很重要的。
二、以PI电流内环的参数整定为例
2.1列出电流环的开环传递函数、闭环传递函数
电流环是控制系统的最内环,电流环的带宽影响外环的带宽。设计电流环要保证电流环的响应速度要足够快速,且在动态响应过程中没有大的超调,而且稳态时,电流应该无静差。
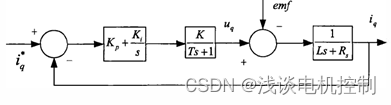
图1 PI电流环控制结构框图


四、总结
就矢量控制而言,PI调节器出来电流环还有速度环和磁链环。PI参数整定都是按照上述的方法。还有一些细节的问题,比如限幅值得选取都影响最终的控制系统性能。















 1402
1402











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









