






星网宇达Newton-M2组合惯导由一台主机及两个蘑菇头天线,M2主机如下图所示
1、硬件连接
①需要把M2的串口线连接到工控机的串口,M2的馈线中的COM0(RS232)连接到工控机上,网线口与工控机接入同一个局域网,M2接上电源并上电。注意,安装双天线,惯导,和载体都要刚性连接。
注:馈线中的网口可连接至路由器上,主要提供给千寻定位使用。
②在工控机上安装串口调试工具cutecom,Ubuntu18.04下安装命令为:sudo apt-get install cutecom。 安装好以后应该可以在/dev/下看到ttyACM0(或者ttyS0)的设备,这就是我们的M2设备名。
2、定位模块配置
下面介绍了导航配置的方法。当设备正确接入系统后,在/dev/下面有名为ttyACM0(或者ttyS0)的设备,即表示M2已经被正确的加载了。配置设备时,需要将设备的串口线连接上电脑的串口才可以对设备进行配置,也就是说,用来配置设备的电脑主机需要拥有串口。
Windows下可以通过串口助手、串口猎人或者COMCenter等工具进行配置,Linux下可以通过Minicom、cutecom等工具进行配置。linux下建议使用cutecom软件,可使用sudo apt-get install cutecom来安装此软件,在终端中使用sudo cutecom命令打开该软件。
可以通过CTRL+alt+t打开终端,输入ls dev查看设备是否接入。
①杆臂配置
车尾天线(后天线,通常是主天线,也就是Primary)杆臂配置:
$cmd,set,leverarm,gnss,x_offset,y_offset,z_offset*ff
例如:$cmd,set,leverarm,gnss,0.1,0.4,-0.8*ff
这里的杆臂值就是车辆集成环节中测量所得的杆臂值,杆臂值请以自己使用的实际情况为准。
注意,后天线指向前天线的方向和车辆行进方向一致。惯导y轴正方向和车辆前进轴向一致。也就是对齐原则。sec是后天线,pri是前天线。
另外,天线若横着安装需要补偿角度偏差,从车后看,天线左前右后的话补270。
天线左右安装,左边前天线,右边后天线
$cmd,set,headoffset,270*ff天线左右安装,右边前天线,左边后天线
$cmd,set,headoffset,90*ff
②网口配置
M2 连接设备的升级口,串口的波特率 115200,发送指令 $cmd,get,netpara*ff 查看网络配置,得到下列的指令反馈(所有 IP 配置用逗号隔开):
$cmd,set,localip,192,168,10,4*ff
$cmd,set,localmask,255,255,255,0*ff
$cmd,set,localgate,192,168,10,1*ff
$cmd,set,netipport,111,13,12,21,8000*ff
$cmd,set,ntrip,disable,disable*ff
$cmd,set,netuser, user:password *ff
$cmd,set,mountpoint,BDKJ*f
下面逐行进行解释:
(a) $cmd,set,localip,192,168,10,4*ff 该指令获取到的是设备即 M2 的 IP ,此 IP 需要和上网的路由器的 IP 在相同网段,但不能相同。
例如路由器的 IP 为:192,168,10,1 设备 IP 就不能设置为 $cmd,set,localip,192,168,10,1*ff,避免 IP 冲突。可以设置为 $cmd,set,localip,192,168,10,2*ff
(b) $cmd,set,localmask,255,255,255,0*ff(设备默认)为子网掩码,一 般按照这个配置即可。
(c) $cmd,set,localgate,192,168,10,1*ff 此配置为设备的网关。
(d) $cmd,set,netipport,203,107,45,154,8002*ff 为千寻 IP 地址和端口 号,此地址在购买账号时千寻提供,8002 为端口号。
(e) $cmd,set,ntrip,disable,disable*ff 默认关闭,注意打开配置。
$cmd,set,ntrip,enable,enable*ff
(f) $cmd,set,netuser, user:password *ff 配置购买的千寻账号密码,格式如下: $cmd,set,netuser,qxttu02:77y7y7*ff
例如账号:qxttu02 ,密码77y7y7,中间冒号隔开。
(g) $cmd,set,mountpoint,BDKJ*ff 该指令为设置千寻的挂载点。简单来说就是介入哪种类别的差分协议,以接入 RTCM32 差分协议来举例: $cmd,set,mountpoint,RTCM32_GGB*ff 配置的时候注意大写。
注意,网络配置请依据自己所使用的路由器的实际情况自行更改为相应的配置,RTK基站信息请以自己的实际情况为准。
将所有配置逐条或一起发送给设备,得到设备返回$cmd,config,ok*ff字段,说明配置成功,配置成功后要进行配置保存,发送$cmd,save,config*ff指令,然后将该设备断电后重新上电加载后即可使用。
$cmd,output,com0,gpfpd,0.1*ff 可以修改输出速率,配置的时候0.1*ff 是10hz,0.02*ff是50hz,0.01*ff是100hz。
③其他设置
以下为一些检查设置的命令,
$cmd,get,headoffset*ff
$cmd,get,navmode*ff
$cmd,get,netpara*ff 检查差分配置
$cmd,get,leverarm*ff 检查杆臂配置
3、惯导状态字
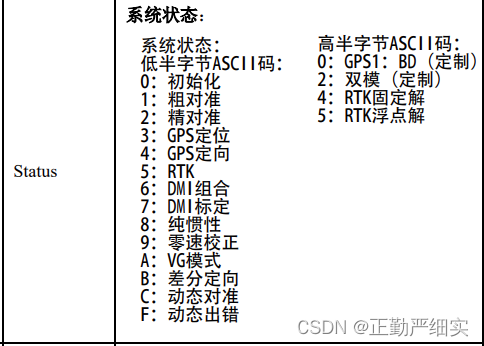
如果差分定位成功的话 在信号良好的情况下 状态上传的肯定是45或者4B。所以,出现4B、45均代表差分,是正确的。4B是效果最好的情况,45稍差。

















 1508
1508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









