




 本文详细描述了如何配置速腾Helios32激光雷达,包括供电连接、IP设置、网络检查、驱动包安装以及ROS编译步骤。特别强调了不同型号雷达的配置注意事项和点云数据的对应关系。
本文详细描述了如何配置速腾Helios32激光雷达,包括供电连接、IP设置、网络检查、驱动包安装以及ROS编译步骤。特别强调了不同型号雷达的配置注意事项和点云数据的对应关系。
速腾激光雷达最近使用较多,16线、32线等多种型号的配置过程相同,下面以Helios 32为例,进行配置。
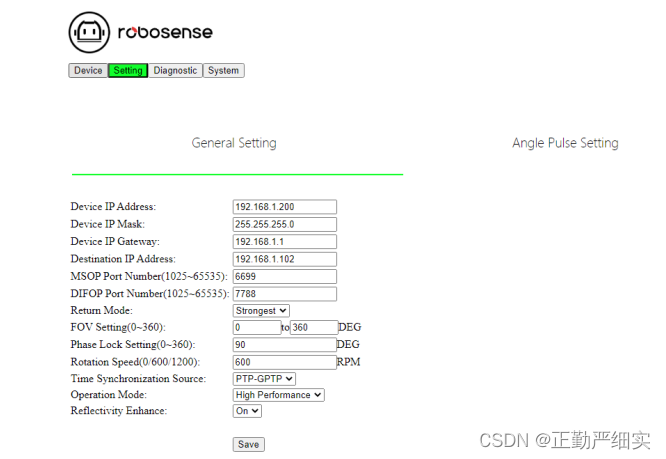
Helios 32雷达出场默认IP地址192.168.1.200,电脑端IP地址为192.168.1.102,MSOP 包端口号6699,DIFOP 包端口号7788。
注:这些默认网络配置表,后期均可在雷达与工控机连接后,登陆192.168.1.200进行修改。
配置流程
1、首先需要将雷达供电,并通过网线将接口盒与工控机连接起来。接口盒正常工作时,红色输入和绿色输出指示灯亮起。当外部电源输入正常, 但接口盒指示灯均未正常亮灯,接口盒可能已经损坏。
2、把电脑的 IP 设置为与产品同一网段上,例如将工控机IP固定为 192.168.1.x(x 的取值范围为 1 ~ 254,不与雷达IP相同),子网掩码为 255.255.255.0。
此时可以ping下雷达IP,检查雷达是否连通,若可以连通,则雷达网络配置完成。
3、 若要修改雷达IP、端口号等,登陆192.168.1.200,显示如下画面,则可以进行相应设置。
4、下载速腾雷达驱动包
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git初始化并更新子模块
cd rslidar_sdk
git submodule init
git submodule update 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1729
1729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









