







文章目录
各类系统稳定性定义
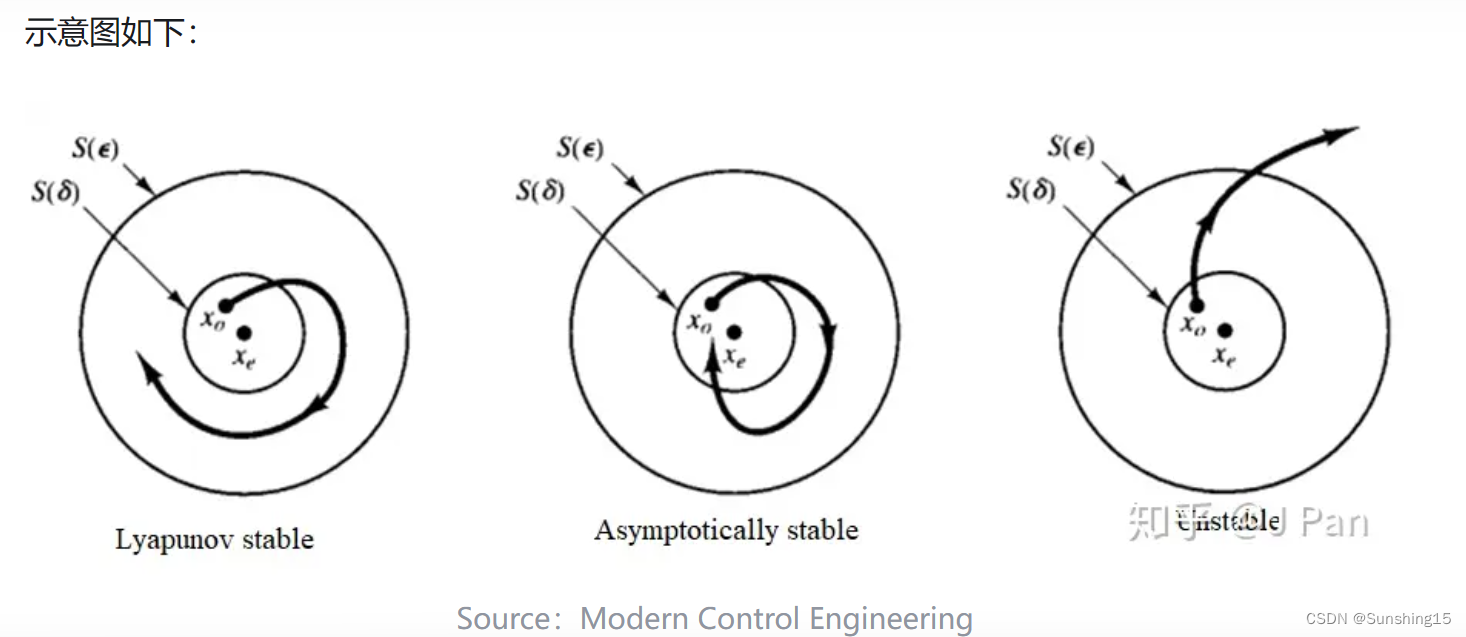
李雅普诺夫意义下的稳定性(内部稳定)
对于 ∀ ε > 0 \forall\varepsilon>0 ∀ε>0, ∃ \exist ∃ δ \delta δ( t 0 t_0 t0, ε \varepsilon ε) > 0 >0 >0,使得当 ∣ ∣ x ( t 0 ) ∣ ∣ < δ ( t 0 , ε ) ||x(t_0)||<\delta(t_0,\varepsilon) ∣∣x(t0)∣∣<δ(t0,ε) 时,有 ∣ ∣ x ( t , t 0 , x 0 ) ∣ ∣ < ε ||x(t,t_0,x_0)||<\varepsilon ∣∣x(t,t0,x0)∣∣<ε 成立,则称系统关于平衡状态 x = 0 x=0 x=0 是李雅普诺夫意义下稳定的。
渐近稳定
如果系统平衡状态 x e = 0 x_e=0 xe=0 是李雅普诺夫意义下稳定的,且从任意有界领域 S ( δ ) S(\delta) S(δ) 出发的任意状态轨迹,当 t t t 趋于无穷大时,该状态轨迹都离不开 S ( δ ) S(\delta) S(δ),且收敛到0,则称平衡状态 x e = 0 x_e=0 xe=0 是渐近稳定的。
指数稳定
如果系统平衡状态 x e = 0 x_e=0 xe=0 是渐近稳定的,且状态轨迹收敛到平衡点的速度大于等于某个关于 t t t 的指数函数,则称平衡状态 x e = 0 x_e=0 xe=0 是指数稳定的。
输入-状态稳定(ISS)
存在一个 K L \mathcal{KL} KL 类函数 β \beta β 和一个 K \mathcal{K} K 类函数 α \alpha α,使对于 ∀ t 0 \forall t_0 ∀t0、 ∀ x ( t 0 ) \forall x(t_0) ∀x(t0) 和任意
有界输入 u ( t ) u(t) u(t),解对于 ∀ t > t 0 \forall t>t_0 ∀t>t0 都存在且满足 ∣ ∣ x ( t ) ∣ ∣ ≤ β ( ∣ ∣ x ( t 0 ) ∣ ∣ , t − t 0 ) + α ( s u p t 0 ≤ τ ≤ t ∣ ∣ u ( τ ) ∣ ∣ ) ||x(t)||\leq\beta(||x(t_0)||,t-t_0)+\alpha(sup_{t_0\leq\tau\leq t}||u(\tau)||) ∣∣x(t)∣∣≤β(∣∣x(t0)∣∣,t−t0)+α(supt0≤τ≤t∣∣u(τ)∣∣)
那么系统是输入-状态稳定的。
有界输入-有界输出稳定(BIBO)
在零初始状态时,对任意有界的输入信号 r ( t ) r(t) r(t), ∣ r ( t ) ∣ < M 1 |r(t)|<M_1 ∣r(t)∣<M1, t ∈ [ 0 , ∞ ) t\in[0,\infty) t∈[0,∞),系统的输出均有界,即存在在常数 M 2 M_2 M2, ∣ y ( t ) ∣ < M 2 |y(t)|<M_2 ∣y(t)∣<M2, t ∈ [ 0 , ∞ ) t\in[0,\infty) t∈[0,∞),则系统成为是有界输入有界输出稳定。
不同类型稳定性之间的关联
有界输入有界输出稳定,就是从传递函数中得到的稳定性分析,是一种外部稳定,有界输入可能会导致有界输出,但是此时系统内部不一定是稳定的(即系统本身并不一定稳定)。这是因为系统内部不稳定的子状态可能是不能观测的,不能观测的子状态无法从传递函数上反应出来。在实际情况下,我们往往希望一个系统不仅仅是外部稳定的,最好还是内部稳定的。
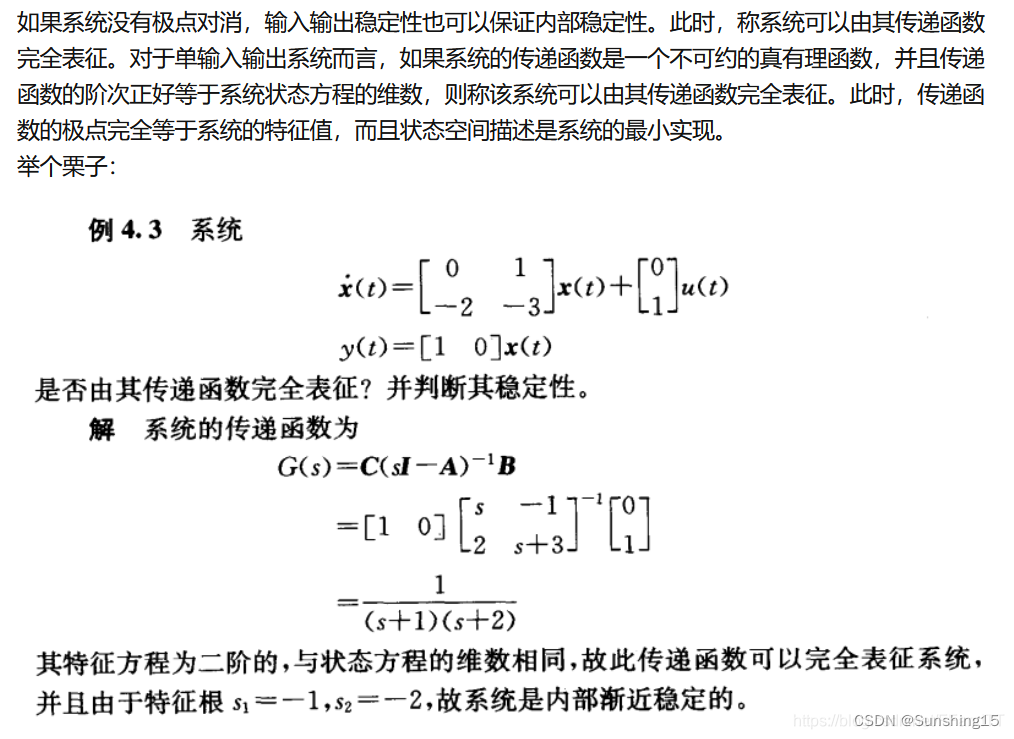
但是当系统内部稳定时,此时系统的传递函数的特征方程与系统状态方程的维数一致,系统具有可观测性,则系统一定具有外部稳定性。
系统外部稳定不一定内部稳定,系统内部稳定一定外部稳定,示例如下:
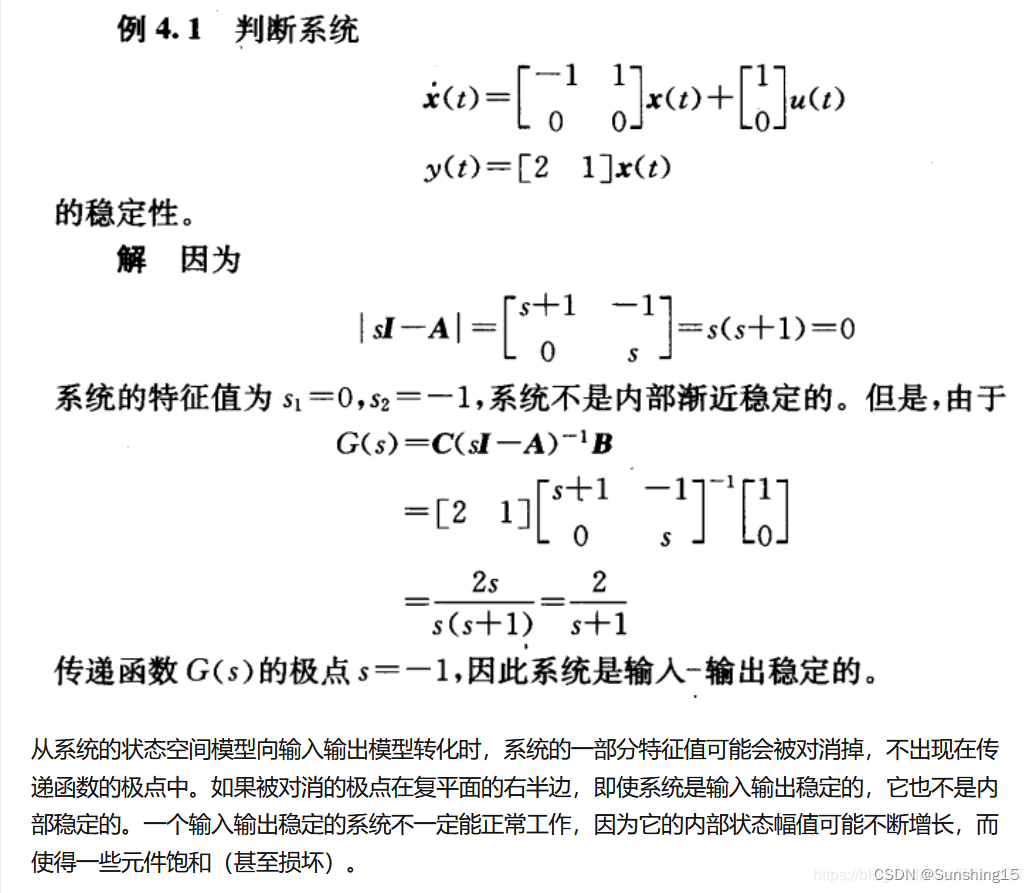
系统外部稳定不一定内部稳定的示例分析
-
系统的不稳定子状态不能观测,示例如下:
[ x ˙ 1 x ˙ 2 ] = [ − 1 0 0 1 ] [ x 1 x 2 ] \begin{bmatrix} \dot x_1\\ \dot x_2 \end{bmatrix}=\begin{bmatrix} -1&0\\ 0&1 \end{bmatrix}\begin{bmatrix} x_1\\ x_2 \end{bmatrix} [x˙1x˙2]=[−1001][x1x2] y = [ 1 0 ] [ x 1 x 2 ] y=[1 ~~0]\begin{bmatrix} x_1\\ x_2 \end{bmatrix} y=[1 0][x1x2]
当初始状态为 0,可得
[ x 1 x 2 ] = [ 1 − e − t e t − 1 ] \begin{bmatrix} x_1\\ x_2 \end{bmatrix}=\begin{bmatrix} 1-e^{-t}\\ e^t-1 \end{bmatrix} [x1x2]=[1−e−tet−1] y ( t ) = 1 − e − t y(t) = 1-e^{-t} y(t)=1−e−t当 t → ∞ t\to\infty t→∞ 时,输出 y ( t ) y(t) y(t) 有界,系统状态 [ x 1 x 2 ] \begin{bmatrix} x_1\\ x_2 \end{bmatrix} [x1x2]中的 x 2 x_2 x2无界,系统内部不稳定。 -
系统的不稳定子状态轨迹不可知,示例如下:
[ x ˙ 1 x ˙ 2 ] = [ − 1 0 0 0 ] [ x 1 x 2 ] \begin{bmatrix} \dot x_1\\ \dot x_2 \end{bmatrix}=\begin{bmatrix} -1&0\\ 0&0 \end{bmatrix}\begin{bmatrix} x_1\\ x_2 \end{bmatrix} [x˙1x˙2]=[−1000][x1x2] y = [ 1 1 ] [ x 1 x 2 ] y=[1 ~~1]\begin{bmatrix} x_1\\ x_2 \end{bmatrix} y=[1 1][x1x2]
当初始状态为 0,可得
[ x 1 x 2 ] = [ 1 − e − t 0 ] \begin{bmatrix} x_1\\ x_2 \end{bmatrix}=\begin{bmatrix} 1-e^{-t}\\ 0 \end{bmatrix} [x1x2]=[1−e−t0] y ( t ) = 1 − e − t y(t) = 1-e^{-t} y(t)=1−e−t当 t → ∞ t\to\infty t→∞ 时,输出 y ( t ) y(t) y(t) 有界,系统状态 [ x 1 x 2 ] \begin{bmatrix} x_1\\ x_2 \end{bmatrix} [x1x2]中的 x 2 x_2 x2状态不可知,系统无法达到渐近稳定状态,内部不稳定。
后注知识点
K \mathcal{K} K类函数.
若定义于 [ 0 , a ) → [ 0 , ∞ ) [0,a)\to[0,\infty) [0,a)→[0,∞) 上的连续函数 α \alpha α 严格递增且满足 α ( 0 ) = 0 \alpha(0)=0 α(0)=0,则称 α \alpha α 属于 K \mathcal{K} K 类函数。若 α = ∞ \alpha=\infty α=∞ 且当 r → ∞ r\to\infty r→∞ 时有 α ( r ) → ∞ \alpha(r)\to\infty α(r)→∞,则称函数 α \alpha α 属于 K ∞ \mathcal{K}_{\infty} K∞ 类函数。
K L \mathcal{KL} KL类函数.
若定义于 [ 0 , a ) × [ 0 , ∞ ) → [ 0 , ∞ ) [0,a)\times[0,\infty)\to[0,\infty) [0,a)×[0,∞)→[0,∞) 上的连续函数 β \beta β,对于任意固定的 s s s,映射 β ( r , s ) \beta(r,s) β(r,s) 都是关于 r r r 的 K \mathcal{K} K 类函数,而对于每个固定的 r r r,映射 β ( r , s ) \beta(r,s) β(r,s) 是关于 s s s 的递减函数,且当 s → ∞ s\to\infty s→∞ 时,有 β ( r , s ) → 0 \beta(r,s)\to0 β(r,s)→0,则函数 β \beta β 属于 K L \mathcal{KL} KL 类函数。
系统可控性
如果存在一个不受约束的控制量 u ( t ) u(t) u(t),使得系统的初始状态 x ( t 0 ) x(t_0) x(t0) 在有限时间 t 0 ≤ t ≤ T t_0\leq t\leq T t0≤t≤T 转变到一个我们期望的状态 x ( t ) x(t) x(t),则称系统是可控的。
系统可观测性
当且仅当一个系统的初始状态 x 0 x_0 x0 在给定控制量 u ( t ) u(t) u(t) 的情况下,可以被在有限时间范围内的历史输出量 y ( t ) y(t) y(t), 0 ≤ t ≤ T 0\leq t\leq T 0≤t≤T 得到,则称系统是可观测的。
参考文献
[1] K类函数和KL类函数
[2] Hassan K, Khalil. Nonlinear Systems, 3rd edition,144.
[3] 李雅普诺夫稳定(内部稳定)与BIBO稳定(外部稳定)的关系
[4] 控制理论中的几种稳定性介绍
[5] 李雅普诺夫稳定性理论(万字长文,全网最全!)
[6] 如何理解李雅普诺夫稳定性分析(重点文献)
[7] 非线性系统学习笔记(12)-输入-状态稳定性(ISS)
[8] ACnD 3. 可控性与可观测性 (Controllablity and Obeservablity)

















 4024
4024

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









