






1.修改turtlesim乌龟显示节点窗体的背景色,已知背景色是通过参数服务器的方式以 rgb 方式设置的。
2.流程和上两个文章的流程差不多通过ROS命令,来获取参数服务器中设置背景色的参数
2-1启动小海龟节点

2.2使用 rosparam list 查看参数服务器列表

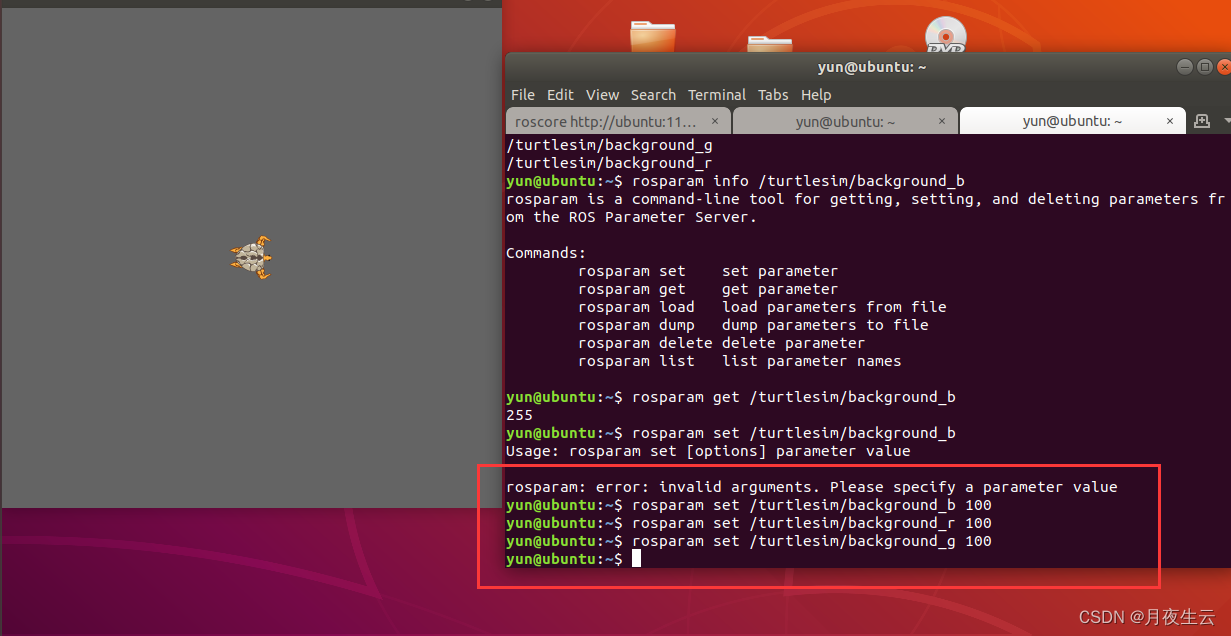
2.3 明显列表后面三个参数是背景图的rgb参数,可以看看参数是多少用 rosparam get命令即可

2.4也可以用rosparam set 命令设置参数,然后重启小海龟节点即可显示
3.在上一个文章的功能包下建立新的cpp文件,编写ros程序,然后配置相关文件,具体过程参照过往文章。
#include"ros/ros.h"
int main(int argc, char *argv[])
{
//有两种方法
//方法一,像过往文章的节点法
// ros::init(argc,argv,"test_param");
// ros::NodeHandle nh("turtlesim");
// //给参数赋值
// nh.setParam("background_r",0);
// nh.setParam("background_g",0);
// nh.setParam("background_b",0);
//方法二,直接调用api
ros::init(argc,argv,"test_param");
ros::param::set("/turtlesim/background_r",100);
ros::param::set("/turtlesim/background_g",0);
ros::param::set("/turtlesim/background_b",100);
return 0;
}
先运行自己的包,然后在运行小海龟节点

















 469
469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









