







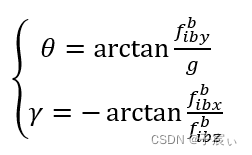
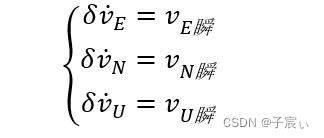
 本文简述了零速检测算法(ZUPT)在惯性导航系统中的重要性,特别是在行人导航中的作用。ZUPT利用人在行走时的零速区间来校正导航系统的误差。通过四条件的零速区间判断方法,结合MATLAB实现半物理半仿真算法,博主分享了相关代码并提及未来可能将算法移植到C++中。
本文简述了零速检测算法(ZUPT)在惯性导航系统中的重要性,特别是在行人导航中的作用。ZUPT利用人在行走时的零速区间来校正导航系统的误差。通过四条件的零速区间判断方法,结合MATLAB实现半物理半仿真算法,博主分享了相关代码并提及未来可能将算法移植到C++中。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包


 2608
623
940
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
2608
623
940
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








