






1.ZUPT概念理解
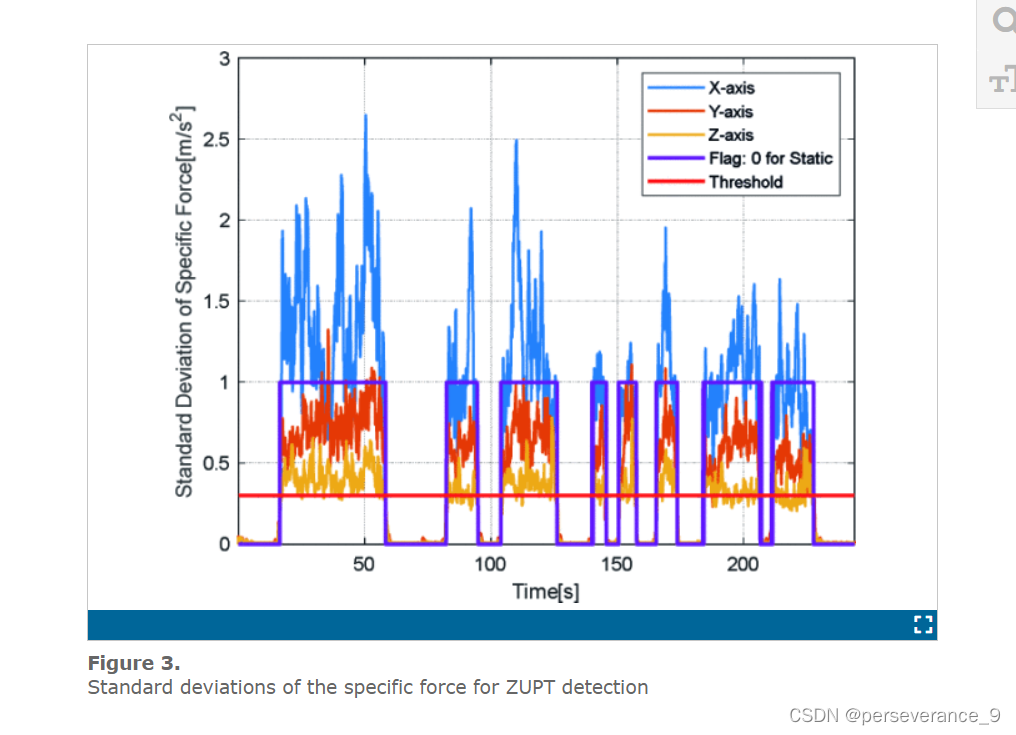
2.零速判定
3.PSINS ZUPT函数解读
3.1 INS初始化部分
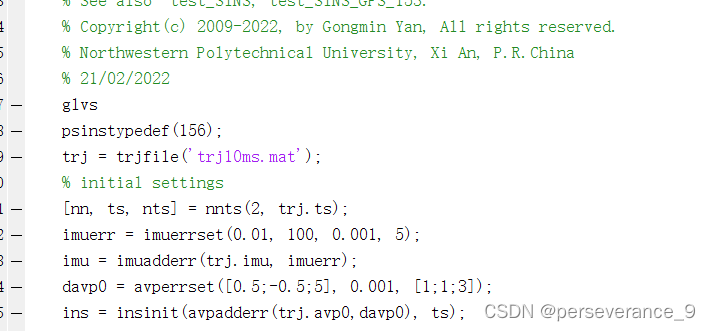
如上图所示 首先设置IMU误差(零偏和随机游走;然后对纯净的IMU原始观测量加入零偏和随机游走误差;对初始AVP加入噪声;初始化INS时间更新函数(初始姿态,初始地球参数等)
3.2 卡尔曼滤波初始化

变量rk代表设置初始的速度和位置误差;
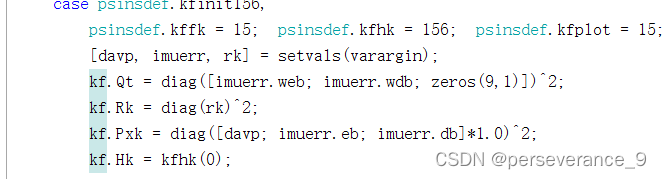
kf.Qt代表过程噪声,对失准角和速度误差部分加入陀螺和速度的随机游走;
kf.Rk 代表量测噪声,对预设的初始速度和位置误差作平方即可
kf.Pxk代表状态向量的方差阵,在零偏部分则是直接加入了零偏
kf.Hk代表量测矩阵,在不考虑杆臂误差的情况下(15维度的状态向量如下所示),如下图所示:
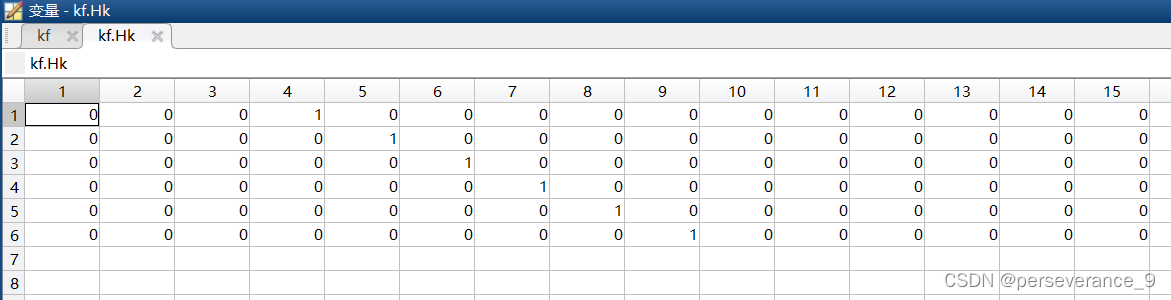
由于零速修正无位置观测量,所以在后续中 会将位置部分的1置为0;
kf.xk代表状态向量,在初始化时全部置为0

3.3进入卡尔曼滤波
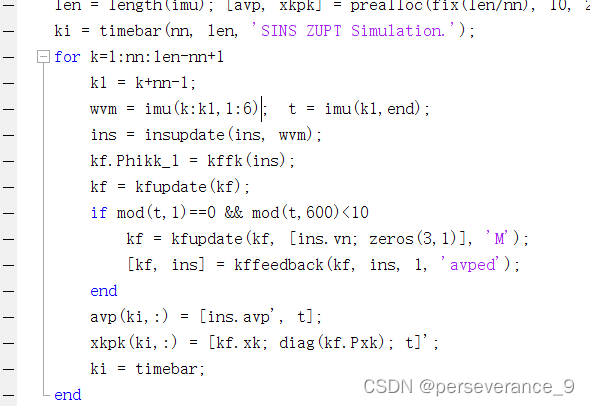
首先是insupdate函数 实现INS姿态、速度、位置更新;
然后,在kffk中计算状态转移矩阵;
在kfupdate中进行时间更新(ins.vn=ins.vn-0,表示calculate minus observation 在ZUPT中将所有的状态待估参数置为0);
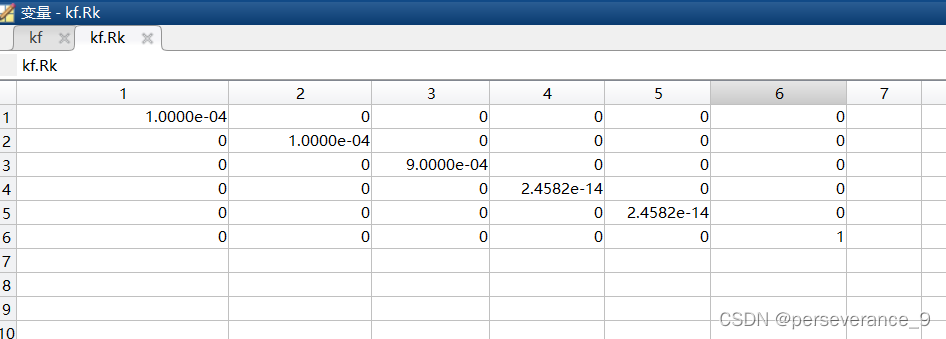
紧接着大概600s一次,进行0速修正。将量测的速度置为惯导递推的速度;量测的R阵如下所示;
滤波完之后在kffeedback中进行全反馈。

















 3773
3773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









