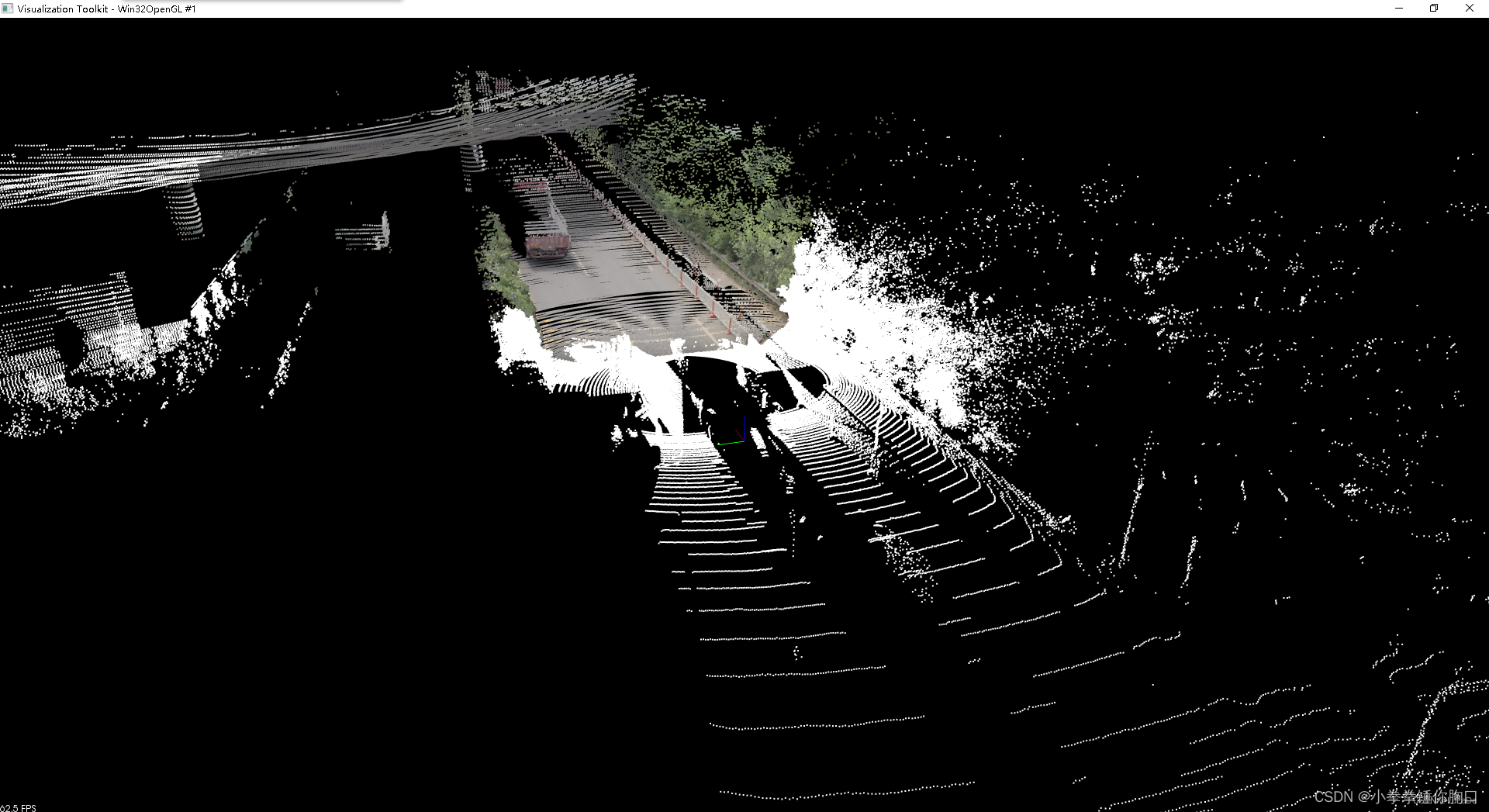
相机投影雷达
import numpy as np
import cv2
import open3d as o3d
def rgb_vis(point_cloud):
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(point_cloud)
vis.run()
vis.destroy_window()
def main():
# 文件读取
path = "2.pcd"
imgPath = "2.jpeg"
# 读取点云
pcd = o3d.io.read_point_cloud(path)
point_cloud = np.asarray(pcd.points)
# 读取图像
img = cv2.imread(imgPath)
if img.shape[2] != 3:
print("RGB pics needed.")
return
# 相机内参 3x3
K = np.array([[1.9506592935364870e+03, 0.0, 1.9770478473401959e+03],
[0.0, 1.9508117738745232e+03, 1.0786204201895550e+03],
[0.0, 0.0, 1.0]])
# 相机内参 3x4
camera_par = np.array([[1.9506592935364870e+03, 0.0, 1.9770478473401959e+03, 0],
[0.0, 1.9508117738745232e+03, 1.0786204201895550e+03, 0],
[0.0, 0.0, 1.0, 0]])
# 相机畸变参数 k1 k2 t1 t2 k3
D = np.array([-0.050519061674533024, -0.007992982752507883, 0.00970045657644595, -0.004354775040194558, 0.0])
# 去畸变
UndistortImage = cv2.undistort(img, K, D)
rows, cols = UndistortImage.shape[:2]
# 雷达坐标到相机坐标变换矩阵
t_word_to_cam = np.array(
[[2.4747462378258280e-02, -9.9955232303502073e-01, -1.6839925611563663e-02, -9.2541271346932907e-02],
[-1.3087302341509554e-02, 1.6519577885364300e-02, -9.9977861656954914e-01, 2.4302538338292576e+00],
[9.9960858363250360e-01, 2.4962312041639460e-02, -1.2672595327247342e-02, -5.0924142692133323e+00],
[0., 0., 0., 1.]])
# 世界坐标》相机坐标》像素坐标
colors = []
for point in point_cloud:
c_x, c_y, c_z = point
word_h = np.array([c_x, c_y, c_z, 1])
p_result = camera_par @ t_word_to_cam @ word_h
p_w = p_result[2]
p_u = int(p_result[0] / p_w)
p_v = int(p_result[1] / p_w)
if 0 <= p_u < cols and 0 <= p_v < rows and p_w > 0:
b, g, r = UndistortImage[p_v, p_u]
colors.append([r / 255.0, g / 255.0, b / 255.0])
else:
colors.append([1.0, 1.0, 1.0])
pcd.colors = o3d.utility.Vector3dVector(colors)
# 保存处理后的点云为新的PCD文件
output_path = "colored_output.pcd"
o3d.io.write_point_cloud(output_path, pcd)
print(f"Colored point cloud saved to {output_path}")
# 可视化处理后的点云
rgb_vis(pcd)
if __name__ == "__main__":
main()
雷达投影相机
import numpy as np
import cv2
import open3d as o3d
def rgb_vis(point_cloud):
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(point_cloud)
vis.run()
vis.destroy_window()
def main():
# 文件读取
path = "2.pcd"
imgPath = "2.png"
# 读取点云
pcd = o3d.io.read_point_cloud(path)
point_cloud = np.asarray(pcd.points)
# 读取图像
img = cv2.imread(imgPath)
if img.shape[2] != 3:
print("RGB pics needed.")
return
# 相机内参 3x3
K = np.array([
[1591.79363371, 0, 1192.55683638],
[0, 1592.95157283, 735.66773825],
[0, 0, 1]
])
# 相机内参 3x4
# 相机内参扩展为3x4 (assuming no skew and principal point at the center)
camera_par = np.concatenate((K, np.zeros((3, 1))), axis=1)
# 相机畸变参数 k1 k2 t1 t2 k3
D = np.array([-0.342347892791610, 0.107009428540231, 0, 0, 0])
# 去畸变
UndistortImage = cv2.undistort(img, K, D)
rows, cols = UndistortImage.shape[:2]
# 雷达坐标到相机坐标变换矩阵
t_word_to_cam = np.array(
[
[-0.066931452111297, -0.997397056468959, 0.026819628359261, -0.183806356422023],
[0.242404431640872, -0.042329624814497, -0.969251409276216, -0.354916895554880],
[0.967863767396600, -0.058372207514532, 0.244606649849797, 0.0103779925979218],
[0, 0, 0, 1]
]
)
# 创建一个复制的图像用于绘制投影点
img_with_points = UndistortImage.copy()
# 世界坐标》相机坐标》像素坐标
for point in point_cloud:
c_x, c_y, c_z = point
word_h = np.array([c_x, c_y, c_z, 1])
p_result = camera_par @ t_word_to_cam @ word_h
p_w = p_result[2]
p_u = int(p_result[0] / p_w)
p_v = int(p_result[1] / p_w)
if 0 <= p_u < cols and 0 <= p_v < rows and p_w > 0:
cv2.circle(img_with_points, (p_u, p_v), 2, (0, 0, 255), -1)
# 保存带有投影点的图像
output_image_path = "projected_points_image.jpeg"
cv2.imwrite(output_image_path, img_with_points)
print(f"Projected points image saved to {output_image_path}")
# 显示图像
cv2.imshow("Projected Points", img_with_points)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
main()

画框
import numpy as np
import cv2
import open3d as o3d
from PIL import ImageFont, ImageDraw, Image
def rgb_vis(point_cloud):
vis = o3d.visualization.Visualizer()
vis.create_window()
vis.add_geometry(point_cloud)
vis.run()
vis.destroy_window()
def put_chinese_text(image, text, position, font_path, font_size, color):
img_pil = Image.fromarray(image)
draw = ImageDraw.Draw(img_pil)
font = ImageFont.truetype(font_path, font_size, encoding="utf-8")
draw.text(position, text, font=font, fill=color)
return np.array(img_pil)
def get_box_points(center, length, width, height):
l, w, h = length / 2, width / 2, height / 2
cx, cy, cz = center
points = [
[cx - l, cy - w, cz - h],
[cx - l, cy + w, cz - h],
[cx + l, cy - w, cz - h],
[cx + l, cy + w, cz - h],
[cx - l, cy - w, cz + h],
[cx - l, cy + w, cz + h],
[cx + l, cy - w, cz + h],
[cx + l, cy + w, cz + h]
]
return points
def draw_cube_edges(image, points, color):
edges = [
(0, 1), (1, 3), (3, 2), (2, 0),
(4, 5), (5, 7), (7, 6), (6, 4),
(0, 4), (1, 5), (2, 6), (3, 7)
]
for edge in edges:
start_point = points[edge[0]]
end_point = points[edge[1]]
cv2.line(image, start_point, end_point, color, 2)
return image
def main():
# 文件读取
path = "2.pcd"
imgPath = "2.jpeg"
font_path = "SimSun.ttf" # 指定支持中文的字体文件路径
# 读取点云
pcd = o3d.io.read_point_cloud(path)
point_cloud = np.asarray(pcd.points)
# 读取图像
img = cv2.imread(imgPath)
if img.shape[2] != 3:
print("RGB pics needed.")
return
# 相机内参 3x3
K = np.array([[1.9506592935364870e+03, 0.0, 1.9770478473401959e+03],
[0.0, 1.9508117738745232e+03, 1.0786204201895550e+03],
[0.0, 0.0, 1.0]])
# 相机内参 3x4
camera_par = np.array([[1.9506592935364870e+03, 0.0, 1.9770478473401959e+03, 0],
[0.0, 1.9508117738745232e+03, 1.0786204201895550e+03, 0],
[0.0, 0.0, 1.0, 0]])
# 相机畸变参数 k1 k2 t1 t2 k3
D = np.array([-0.050519061674533024, -0.007992982752507883, 0.00970045657644595, -0.004354775040194558, 0.0])
# 去畸变
UndistortImage = cv2.undistort(img, K, D)
rows, cols = UndistortImage.shape[:2]
# 雷达坐标到相机坐标变换矩阵
t_word_to_cam = np.array(
[[2.4747462378258280e-02, -9.9955232303502073e-01, -1.6839925611563663e-02, -9.2541271346932907e-02],
[-1.3087302341509554e-02, 1.6519577885364300e-02, -9.9977861656954914e-01, 2.4302538338292576e+00],
[9.9960858363250360e-01, 2.4962312041639460e-02, -1.2672595327247342e-02, -5.0924142692133323e+00],
[0., 0., 0., 1.]])
# 定义中心点和立方体尺寸
center = [25.912266, 3.457932, 1.448326]
length, width, height = 10.0, 6.0, 8.0 # 自定义立方体的尺寸
# 获取立方体的八个角点
box_points = get_box_points(center, length, width, height)
box_points1 = get_box_points([26.912266, 4.457932, 2.448326], 7, 4, 5)
# 定义框的点和描述信息
boxes = [
{
"points": box_points,
"description": "距离:3.8米 物体:鬼魂"
},
# 添加更多的框和描述
{
"points": box_points1,
"description": "距离:3.8米 物体:卑微小吴"
},
]
# 创建一个复制的图像用于绘制投影点
img_with_points = UndistortImage.copy()
for box in boxes:
projected_points = []
for point in box["points"]:
c_x, c_y, c_z = point
word_h = np.array([c_x, c_y, c_z, 1])
p_result = camera_par @ t_word_to_cam @ word_h
p_w = p_result[2]
p_u = int(p_result[0] / p_w)
p_v = int(p_result[1] / p_w)
if 0 <= p_u < cols and 0 <= p_v < rows and p_w > 0:
projected_points.append((p_u, p_v))
if projected_points:
# 绘制立方体的边
img_with_points = draw_cube_edges(img_with_points, projected_points, (0, 255, 0))
# 添加文字
text_position = (int(projected_points[0][0]), int(projected_points[0][1]) - 50) # 调整文字位置
img_with_points = put_chinese_text(img_with_points, box["description"], text_position, font_path, 30,
(255, 0, 0)) # 增加字体大小
# 保存带有投影点的图像
output_image_path = "projected_points_image.jpeg"
cv2.imwrite(output_image_path, img_with_points)
print(f"Projected points image saved to {output_image_path}")
# 显示图像
cv2.imshow("Projected Points", img_with_points)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == "__main__":
main()


























 2742
2742

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









