







在前面,我们最后推导出来了这个求内参式子,它实际上是没有物理意义的,那么我们就可以在图像成像的时候可以找到一个有物理意义的东西——重投影误差。找到重投影误差之后,我们就可以使用光束法平差来计算内参。
五、最小重投影误差
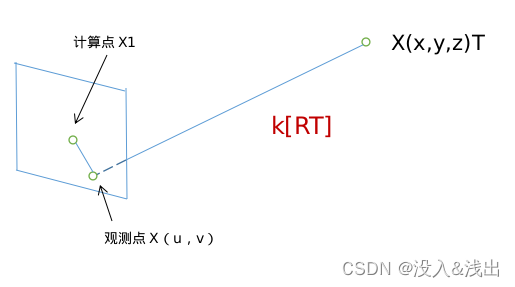
X已知,观测点x(u,v)也是已知的,然后通过X和观测点x之间的单应变换我们可以找出K[R,T]的估计量。
将X带入上面的方程中,可以求出在k[RT]参数下,在图像上的计算点X1。然后在计算点和观测点之间有一个误差,叫做重投影误差,即|X - X1|。
在图像上,重投影误差的平方最小(),求出来的K[RT]是最理想化的。
六、光束法平差
内外参数的估计量K[RT],我们可以使用非线性标定的方法求解
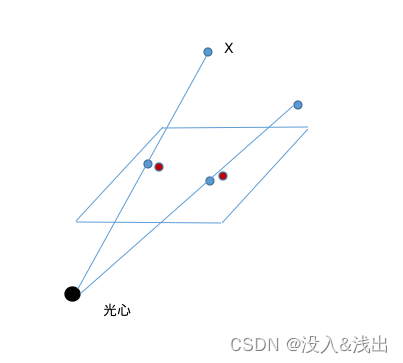
红点是计算点,黑点是观测点。
P =
上述过程叫光束法平差。

















 4054
4054











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











