






0. 简介
在之前,作者曾经转过一篇《一文详解ORB-SLAM3》的文章。那篇文章中提到了ORB-SLAM3是一个支持视觉、视觉加惯导、混合地图的SLAM系统,可以在单目,双目和RGB-D相机上利用针孔或者鱼眼模型运行。与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。此外,ORB-SLAM3还支持更多的传感器,包括RGB-D摄像头和车载LIDAR。ORB-SLAM3的代码结构也比ORB-SLAM2更加简洁,使得它更容易理解和扩展。
1. 主要贡献
一个单目和双目的视觉惯导SLAM系统:全部依赖于MAP(最后后验概率估计),即使是在IMU初始化的时候。
高召回率的场景重识别算法:DBoW2需要匹配三个连续的关键帧,太慢了。作者的方法是:候选的关键帧第一次就进行几何一致性检测,然后利用三个共视的关键帧进行局部的一致性检验,这种策略提升了召回率,并简化了数据关联,从而提高了地图准确性,但计算成本变高。
第一个可以解决纯视觉或者视觉惯导的完整的混合地图的SLAM系统。在单目或者双目的系统中,Atlas代表的是一系列不连续的地图,而且可以把他们应用到所有的建图过程中:场景重识别、相机重定位、闭环检测和精确的地图融合。这就允许地图是在不同的时间构建的(增量的SLAM系统),纯视觉的Atlas是参考的2019年IROS的一篇文章:ORBSLAM-atlas: a robust and accurate multi-map system,本文又添加了视觉惯导的混合地图系统来实现场景重识别。
抽象的相机表示:使SLAM系统与所使用的相机模型无关。并允许通过提供其投影,非投影和Jacobian函数来添加新模型我们提供了针孔和鱼眼模型的实现。
2. ORB-SLAM2 和 ORB-SLAM3 相关改进代码汇总(截止2023.1.30日)
这部分可以看一下作者的《使用ORBSLAM2进行kineticV2稠密建图,实时转octomap建图以及导航》这篇文章。这里来汇总一下2,3中常见的扩展,算是一个大全吧
1.https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
高翔实现的添加稠密点云地图
2.https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP

3.https://github.com/gaoxiang12/ORB-YGZ-SLAM
使用SVO中直接法来跟踪代替耗时的特征点提取匹配,在保持同样精度的情况下,是原始ORB-SLAM2速度的3倍
4.https://github.com/gaoxiang12/ygz-stereo-inertial
双目VIO版本,加入了LK光流和滑动窗口BA优化
5.https://github.com/jingpang/LearnVIORB
VI-ORB-SLAM2
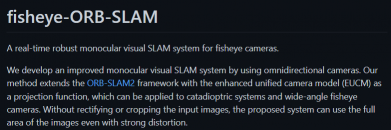
6.https://github.com/lsyads/fisheye-ORB-SLAM
添加了支持鱼眼
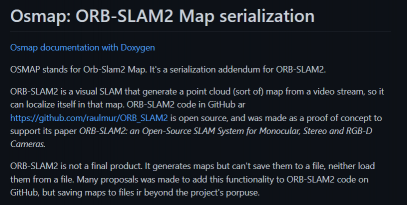
7.https://github.com/AlejandroSilvestri/osmap
添加保存和导入地图功能
8.https://github.com/Jiankai-Sun/ORB_SLAM2
添加保存和导入地图功能

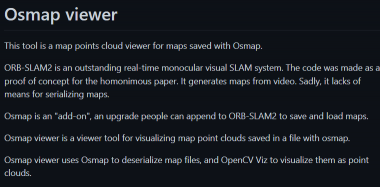
9.https://github.com/AlejandroSilvestri/Osmap-viewer
添加了地图可视化
10.https://github.com/atlas-jj/ORB_Line_SLAM
添加了线特征

11.https://github.com/maxee1900/RGBD-PL-SLAM
添加了点线融合

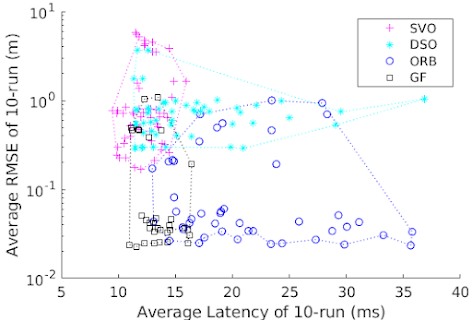
12.GitHub - ivalab/gf_orb_slam2: Real-Time SLAM for Monocular, Stereo and RGB-D Cameras, with Loop Detection and Relocalization Capabilities
使用了一种更好的特征选择方法
13.https://github.com/Ewenwan/ORB_SLAM2_SSD_Semantic
动态语义SLAM 目标检测+VSLAM+光流/多视角几何动态物体检测+octomap地图+目标数据库
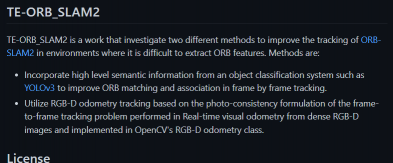
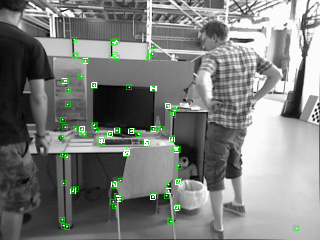
14.https://github.com/Eralien/TE-ORB_SLAM2
用YOLO v3的语义信息来增加跟踪性能
15.GitHub - bijustin/YOLO-DynaSLAM
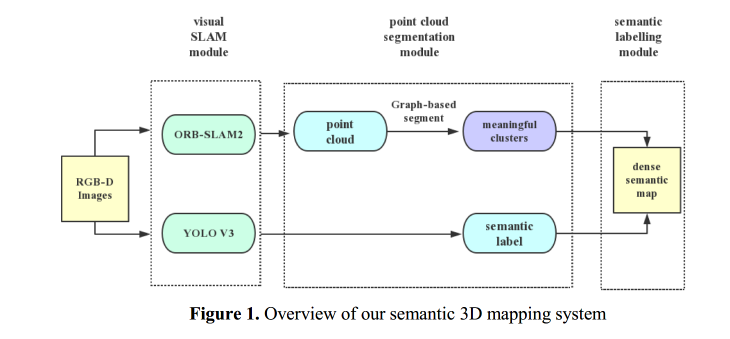
16.https://github.com/qixuxiang/orb-slam2_with_semantic_label
提出了一种构建3D密集语义图的方法,该方法同时利用YOLOv3[3]的2D图像标签和3D几何信息
17.https://github.com/VisionerTech/ORB_SLAM2_Unity
ORB-SLAM2在unity中仿真
18.https://github.com/thien94/ORB_SLAM2_CUDA
点击ORB-SLAM3整体流程详解 - 古月居 可查看全文

















 2266
2266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









