






 本文介绍了如何使用Matlab2020及以上版本和OpenCV库在实际场景中对激光雷达和相机进行标定,包括求解PnP问题来估计相机姿态和激光雷达到相机的变换矩阵,展示了关键代码片段和过程.
本文介绍了如何使用Matlab2020及以上版本和OpenCV库在实际场景中对激光雷达和相机进行标定,包括求解PnP问题来估计相机姿态和激光雷达到相机的变换矩阵,展示了关键代码片段和过程.
一. Matlab
Matlab2020及其以上版本,
CSDN:2022使用MATLAB进行相机和激光雷达的标定(有重大更新)
二. OpenCV
我们假设已经求出了相机的内参K,并且已知点在图像上的坐标以及点在激光雷达下的坐标。
import math
import cv2 as cv
import numpy as np
import open3d as o3d
from matplotlib import pyplot as plt
PointsInImg = np.array([[1041., 144.],
[1376., 463.],
[ 906., 967.],
[ 568., 654.],
[ 861., 131.],
[1347., 613.],
[1037., 949.],
[ 525., 454.]])
PointsInLid = np.array([[ 0.1372 , 1.54206, 0.27411],
[ 0.35176, 1.55096, -0.07609],
[-0.04767, 1.54776, -0.49878],
[-0.30885, 1.53051, -0.18308],
[-0.08583, 1.5382 , 0.27606],
[ 0.3382 , 1.55958, -0.16804],
[ 0.0803 , 1.51905, -0.48176],
[-0.30631, 1.4914 , -0.0582 ]])
# cv.solvePnP
Intrinsics = np.array([[1693.812,0 ,984.510],
[0 ,1700.520,511.520],
[0 ,0 , 1]])
Dist = np.array([[0.0933864283576713,-0.552732596154694,0,0]])
_,r,t = cv.solvePnP(PointsInLid,PointsInImg,Intrinsics,Dist,flags=1)
"""
SOLVEPNP_ITERATIVE = 0,
SOLVEPNP_EPNP = 1, //!< EPnP: Efficient Perspective-n-Point Camera Pose Estimation @cite lepetit2009epnp
SOLVEPNP_P3P = 2, //!< Complete Solution Classification for the Perspective-Three-Point Problem
SOLVEPNP_DLS = 3, //!< A Direct Least-Squares (DLS) Method for PnP @cite hesch2011direct
SOLVEPNP_UPNP = 4, //!< Exhaustive Linearization for Robust Camera Pose and Focal Length Estimation
SOLVEPNP_AP3P = 5, //!< An Efficient Algebraic Solution to the Perspective-Three-Point Problem
SOLVEPNP_MAX_COUNT //!< Used for count
"""
# 将旋转向量rvec转换为旋转矩阵R
R, _ = cv.Rodrigues(r)
Rt = np.concatenate((R, t.reshape((-1,1))), axis=1)
Translation = np.concatenate((Rt,np.array([[0,0,0,1]])), axis=0)
"""print(Translation)
[[ 0.9979607 0.05368444 -0.03453153 -0.12919706]
[-0.05351042 0.4086693 -0.91111253 -0.72221526]
[-0.03480059 0.91110229 0.41070857 0.07698976]
[ 0. 0. 0. 1. ]]"""import cv2
import numpy as np
import pandas as pd
import open3d as o3d
from mayavi import mlab
from matplotlib import pyplot as plt
# 已知相机内参K
# [[fx, 0 , cx],
# [0 , fy, cy],
# [0 , 0 , 1 ]]
Intrinsics = np.array([[1693.812,0 ,984.510],
[0 ,1700.520,511.520],
[0 ,0 , 1]])
# 已知激光雷达到相机的变换矩阵 T
Translation = np.array([[ 0.99796070, 0.05368444, -0.034531530, -0.12919706],
[-0.05351042, 0.40866930, -0.91111253, -0.72221526],
[-0.03480059, 0.91110229, 0.410708570, 0.07698976],
[ 0., 0., 0., 1., ]])
PointsInLid_dataframe = pd.read_csv("D:\\PyCharm_project\\B2-JiaoDianJianCe\\biaodingban-231104-001.csv")
PointsInLid_array = np.asarray(PointsInLid_dataframe[['Points:0','Points:1','Points:2']])
# 只保留'intensity','vertical_angle','Points:0','Points:1','Points:2'
PointsInLid_hsoe = np.concatenate((PointsInLid_array, np.ones((PointsInLid_array.shape[0], 1))), axis=1)
# 将点云坐标系变成齐次坐标系
Lid2Cam = np.dot(Translation, PointsInLid_hsoe.T).T
Intrinsics_extend = np.concatenate((Intrinsics, np.zeros((Intrinsics.shape[0], 1))), axis=1)
Cam2Img = np.dot(Intrinsics_extend, Lid2Cam.T).T
PointsInImg = np.int0(Cam2Img/Cam2Img[:, -1:])
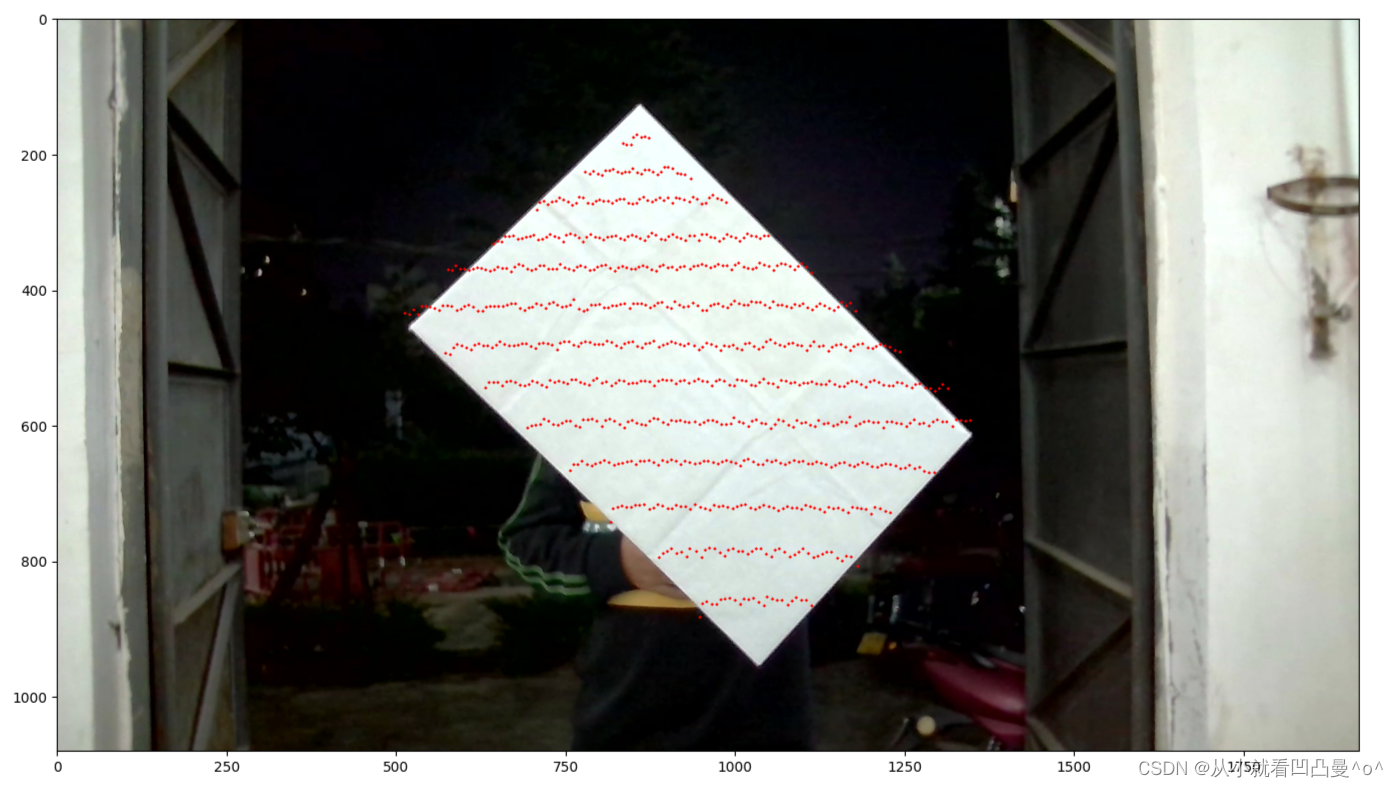
img=cv2.imread('D:\\PyCharm_project\\B2-JiaoDianJianCe\\video001.jpg') #原图为彩色图,可将第二个参数变为0,为灰度图
img_RGB = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
for i in PointsInImg: # type: ignore
x,y,_ = i.ravel()
#print((x,y))
cv2.circle(img_RGB,(x,y),2,(255,0,0),-1)
plt.imshow(img_RGB)
plt.show()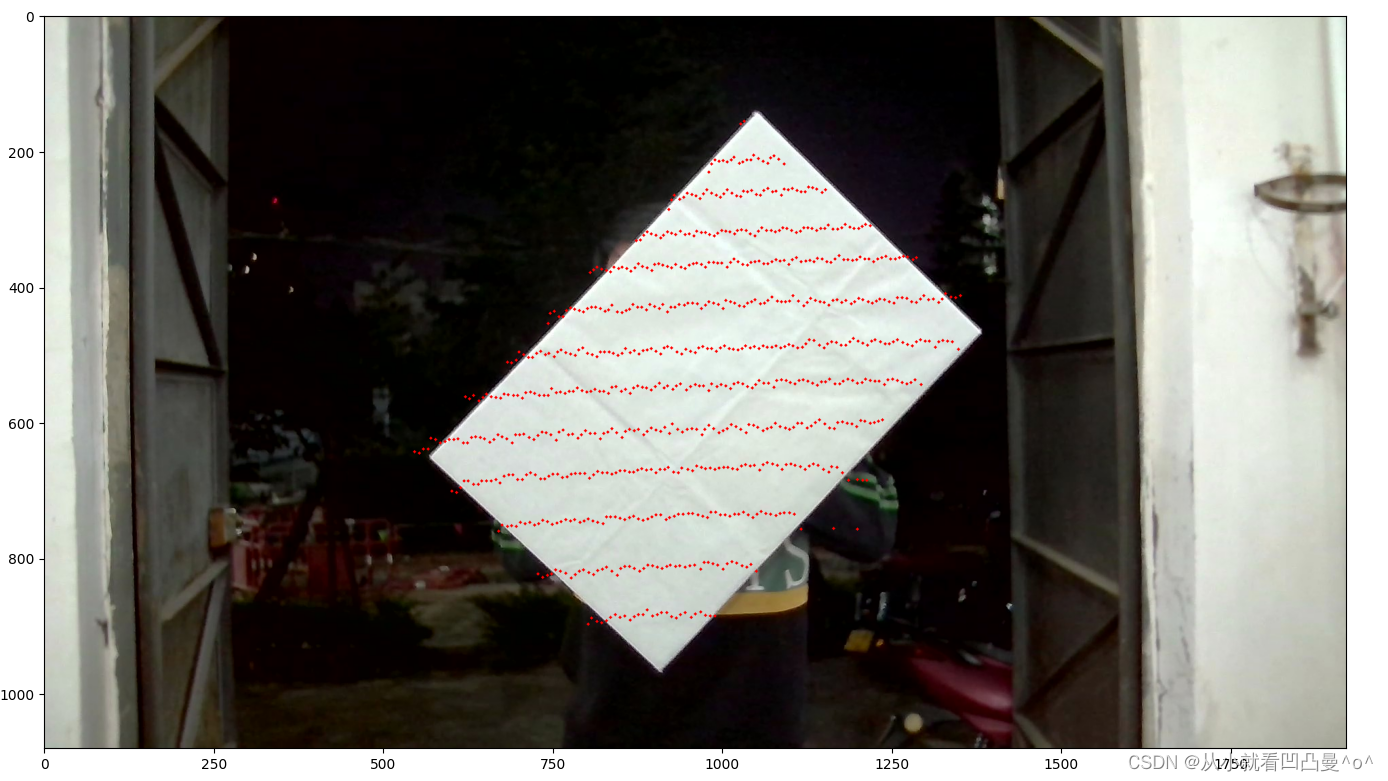
















 3774
3774











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











