










在看完《视觉slam十四讲》第四章李群和李代数后,准备调试相应的代码,但是出现了各种各样的问题,但最后还是万幸,成功完成了调试。在这里记录一下期间遇到的问题和相应的解决方法以及最后的感想。
高博为我们提供的sophus代码采用的是模板类的sophus库,而这个带模板类的库需要依赖fmt,同时也需要Eigen库的下载。
目录
4.1 Fatal error :Eigen/core没有那个文件或目录
4.2.Fatal error :sophus/so没有那个文件或目录
4.3.error: missing template arguments before ‘SO3_R’
1.Eigen库安装:
1.1查看以装版本
可利用以下代码查看以装的Eigen的版本:
pkg-config --modversion eigen3 如下图所示: 
如果Eigen版本低于3.3的,建议卸载原来的老版本然后重新安装,建议安装3.3.7版本的。
1.2删除旧的Eigen库的方法:
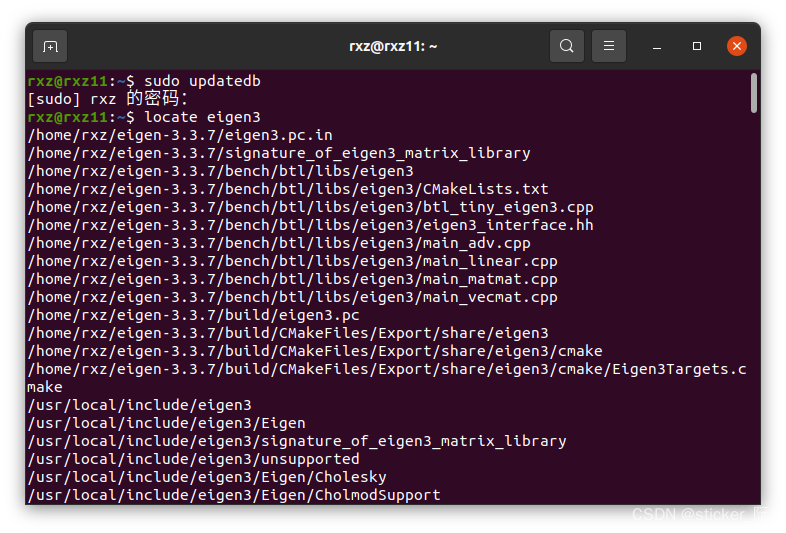
通过以下指令查找Eigen库所在的位置:
sudo updatedb
locate eigen3
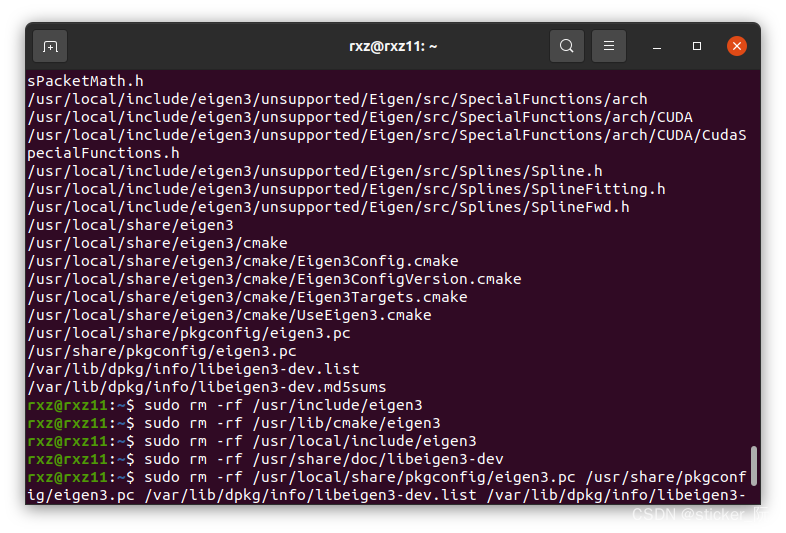
 只需按照以下代码卸载以下文件:
只需按照以下代码卸载以下文件:
sudo rm -rf /usr/include/eigen3
sudo rm -rf /usr/lib/cmake/eigen3
sudo rm -rf /usr/local/include/eigen3
sudo rm -rf /usr/share/doc/libeigen3-dev
sudo rm -rf /usr/local/share/pkgconfig/eigen3.pc /usr/share/pkgconfig/eigen3.pc /var/lib/dpkg/info/libeigen3-dev.list /var/lib/dpkg/info/libeigen3-dev.md5sums
sudo rm -rf /usr/local/lib/pkgconfig/eigen3.pc
sudo rm -rf /usr/local/share/eigen3
最后可再次利用以下代码查看删除情况:
sudo updatedb
locate eigen3
pkg-config --modversion eigen3
1.3安装新的Eigen版本
安装链接如下:
点击other downloads->选择合适版本文件->点击.zip文件下载
随后在终端中输入以下指令:
cd eigen-3.3.7 # 进入eigen解压的目录,注意文件名
mkdir build # 新建一个build文件夹
cd build # 进入build文件夹
cmake .. # 用cmake生成Makefile
sudo make install # 安装 注意现在此时Eigen头文件默认安装在/usr/local/include/eigen3中,以后需要这个库时,在对应的CMakeLists.txt中引用该目录即可。这个也是我遇到的其中一个问题。
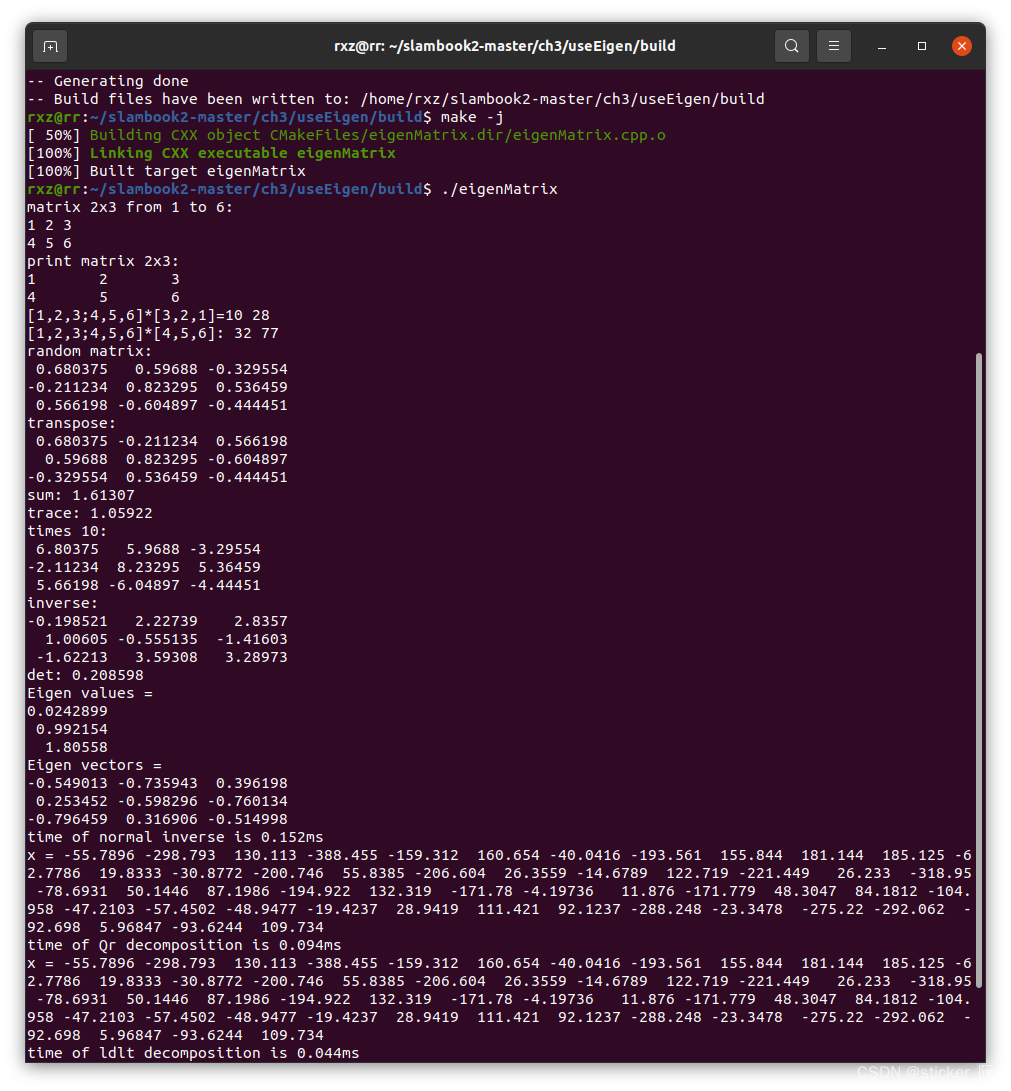
下载Eigen后,简单的运行一下高博提供的eigen代码。表示成功。
2. fmt安装
因为所使用的代码采用的是模板类的sophus库,因此需要安装fmt。
一个是直接克隆(这个比较看运气,有时候连接不上)
git clone https://github.com/fmtlib/fmt.git另一个是去官网下载8.1.1版本的fmt,官网链接。
上面下载选项二者选其一,然后在终端上运行下面指令
cd fmt
mkdir build
cd build
cmake ..
make
sudo make install3.安装Sophus库
git clone https://github.com/strasdat/Sophus.git
cd Sophus
mkdir build
cd build
cmake ..
sudo make install安装结束后,可以运行一下高博提供的代码。在运行ch4中的usesophus代码时,我遇到了许多问题,接下来稍微介绍一下:
4.出现的问题:
4.1 Fatal error :Eigen/core没有那个文件或目录
是因为useSophus.cpp文件中最开始的Eigen/core头文件无法找到,说明包含Eigen的路径有问题或者完全没有包含。
解决方法:在useSophus文件下的CmakeLists.txt文件中把Eigen的路径包含进来,在CmakeLists.txt文件中添加以下代码(这个路径应该都是一样的,如果你按照我之前的下载方法):
include_directories( "/usr/local/include/eigen3/" )参考文献:SLAMBook2踩坑记之:Fatal error :Eigen/core没有那个文件或目录_梧桐雪的博客-CSDN博客
4.2.Fatal error :sophus/so没有那个文件或目录
和上一个问题是如出一辙,useSophus.cpp文件中的sophus/so3头文件无法找到。在CmakeLists.txt文件中添加以下代码(其中的路径是高博提供的Sophus库的位置,根据自己的情况改):
include_directories( "/home/rxz/pan1/code/slambook/ch4/useSophus/Sophus " )这里再做一个补充,后来我由于各种原因(好吧,就是重装系统了,呜呜)重新下载了《视觉SLAM十四讲》的源代码,下载链接GitHub - gaoxiang12/slambook2: edition 2 of the slambook
发现里面代码没有提供Sophus的库,那么这里的路径可以换成我们在第3步安装的Sophus库的路径:
include_directories( "/home/rxz/Sophus/sophus " )4.3.error: missing template arguments before ‘SO3_R’
因为我们使用的代码是使用模板类的Sophus库,因此需要修改useSophus.cpp中的头文件。
解决方法:
(1)把头文件.h 修改为 .hpp如下所示:
#include "sophus/so3.hpp"
#include "sophus/se3.hpp"同时改一下ch4中useSophus代码,变成以下:
#include <iostream>
#include <cmath>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/so3.hpp"
#include "sophus/se3.hpp"
int main( int argc, char** argv )
{
// 沿Z轴转90度的旋转矩阵
Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();
Sophus::SO3<double> SO3_R(R); // Sophus::SO(3)可以直接从旋转矩阵构造
// Sophus::SO3 SO3_v( 0, 0, M_PI/2 ); // 亦可从旋转向量构造
Eigen::Quaterniond q(R); // 或者四元数
Sophus::SO3<double> SO3_q( q );
// 上述表达方式都是等价的
// 输出SO(3)时,以so(3)形式输出
cout<<"SO(3) from matrix: "<<SO3_R.log()<<endl;
// cout<<"SO(3) from vector: "<<SO3_v<<endl;
cout<<"SO(3) from quaternion :"<<SO3_q.log()<<endl;
// 使用对数映射获得它的李代数
Eigen::Vector3d so3 = SO3_R.log();
cout<<"so3 = "<<so3.transpose()<<endl;
// hat 为向量到反对称矩阵
cout<<"so3 hat=\n"<<Sophus::SO3<double>::hat(so3)<<endl;
// 相对的,vee为反对称到向量
cout<<"so3 hat vee= "<<Sophus::SO3<double>::vee( Sophus::SO3<double>::hat(so3) ).transpose()<<endl; // transpose纯粹是为了输出美观一些
// 增量扰动模型的更新
Eigen::Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3<double> SO3_updated = Sophus::SO3<double>::exp(update_so3)*SO3_R;
cout<<"SO3 updated = "<<SO3_updated.log()<<endl;
/********************萌萌的分割线*****************************/
cout<<"************我是分割线*************"<<endl;
// 对SE(3)操作大同小异
Eigen::Vector3d t(1,0,0); // 沿X轴平移1
Sophus::SE3<double> SE3_Rt(R, t); // 从R,t构造SE(3)
Sophus::SE3<double> SE3_qt(q,t); // 从q,t构造SE(3)
cout<<"SE3 from R,t= "<<endl<<SE3_Rt.log()<<endl;
cout<<"SE3 from q,t= "<<endl<<SE3_qt.log()<<endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double,6,1> Vector6d;
Vector6d se3 = SE3_Rt.log();
cout<<"se3 = "<<se3.transpose()<<endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout<<"se3 hat = "<<endl<<Sophus::SE3<double>::hat(se3)<<endl;
cout<<"se3 hat vee = "<<Sophus::SE3<double>::vee( Sophus::SE3<double>::hat(se3) ).transpose()<<endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0,0) = 1e-4d;
Sophus::SE3<double> SE3_updated = Sophus::SE3<double>::exp(update_se3)*SE3_Rt;
cout<<"SE3 updated = "<<endl<<SE3_updated.matrix()<<endl;
return 0;
}
参考文献:关于sophus模板类需要注意的情况(error: missing template arguments before ‘SO3_R’)_sdhdwyx的博客-CSDN博客
4.4 出现fmt相关问题
解决方法:在CmakeLists.txt文件中添加fmt,如下:
target_link_libraries( useSophus ${Sophus_LIBRARIES} fmt)最后附上完整的终端指令,CmakeLists.txt内容和改进的ch4中useSophus代码(见4.3)
CmakeLists.txt内容:
cmake_minimum_required( VERSION 2.8 )
project( useSophus )
# 为使用 sophus,您需要使用find_package命令找到它
find_package( Sophus REQUIRED )
#set(Sophus_LIBRARIES libSophus.so)
include_directories( ${Sophus_INCLUDE_DIRS} )
include_directories( "/home/rxz/pan1/code/slambook/ch4/useSophus/Sophus " )
include_directories( "/usr/local/include/eigen3/" )
add_executable( useSophus useSophus.cpp )
target_link_libraries( useSophus ${Sophus_LIBRARIES} fmt)
终端代码指令如下:
cd pan1/code/slambook/ch4/useSophus/ #这里的路径是进入代码所在文件夹,视自己情况而改
mkdir build #如果是第一次跑这个代码,那里面是没有build文件夹的,需要创建一个
cd build
cmake ..
make
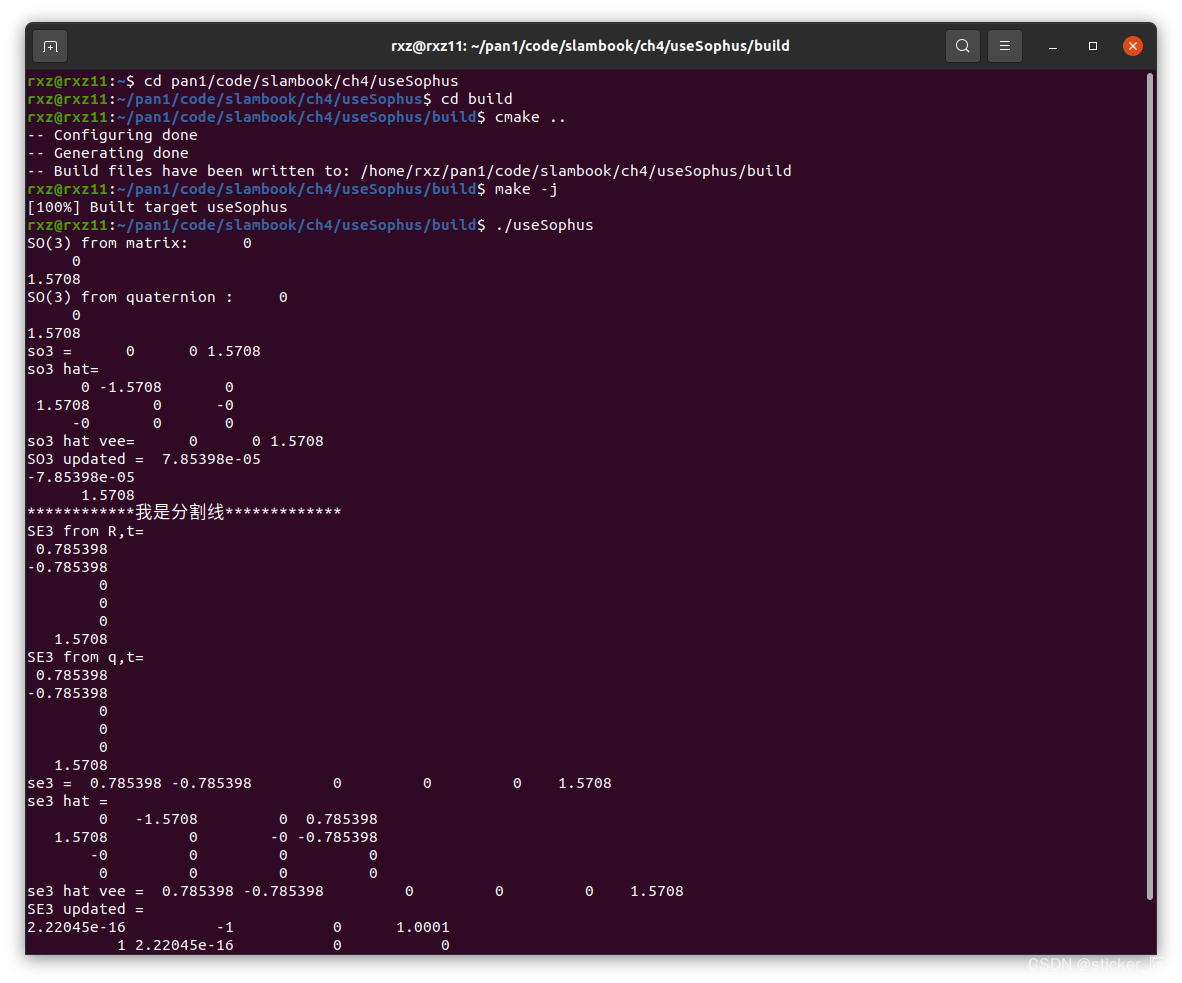
./useSophus
运行结果如下:















 317
317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









