








我真佛了,我文章写了大半,新显示屏到了,我就想如何在ununtu系统上显示双屏幕,这样我写文章就不用看这个小小的笔记本屏幕了,说干就干,我就去网上找教程,结果,结果,我系统爆炸了,我找了一晚上的解决办法直接给我干到了半夜2点半还是没解决,只能重装了

1.安装usb_cam功能包
驱动我们笔记本的相机我们用的是usb_cam功能包
安装命令:
sudo apt-get install ros-melodic-usb-cam //ros版本为melodic
模板:
sudo apt-get install ros-ros版本号-usb-cam 查看自己ros版本号的方法就算在终端中输入:
roscore
我已经安装过了usb-cam

启动驱动进行测试:
roslaunch usb_cam usb_cam-test.launch 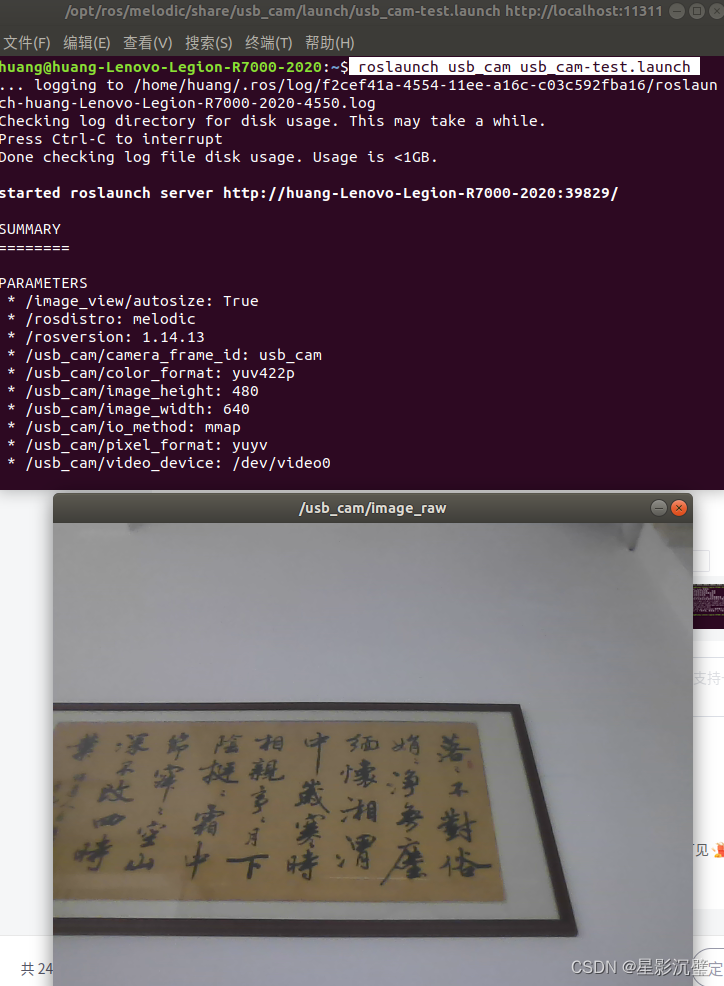
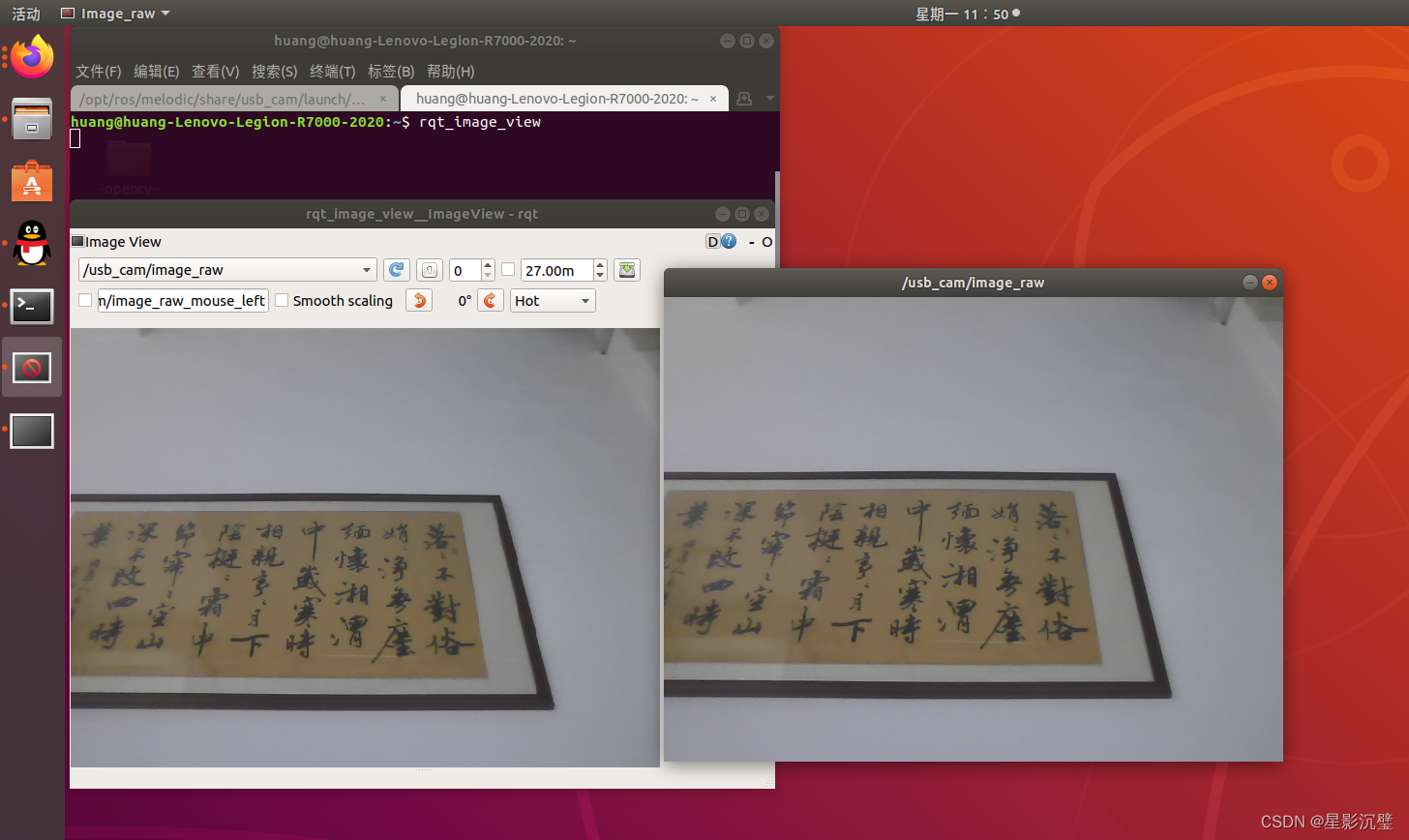
我们安装ROS的时候就已经给我们安装好了图像显示工具,我们只需要在终端中输入:
rqt_image_view
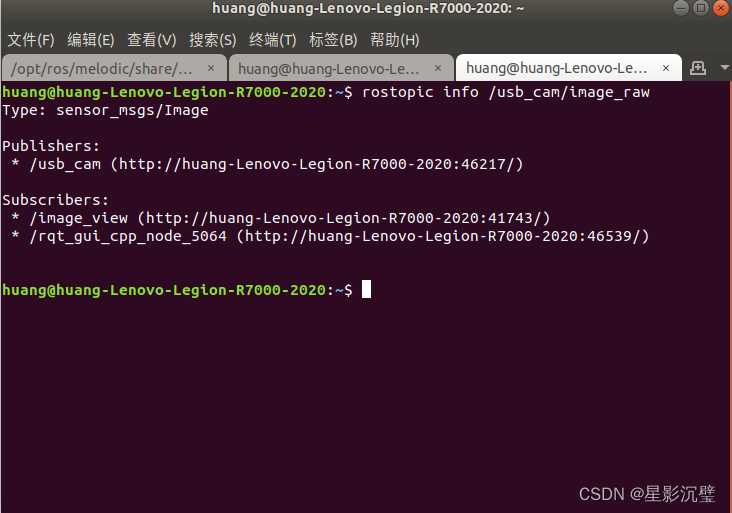
显示图像类型:
rostopic info /usb_cam/image_raw
查看图像消息:
rosmsg show sensor_msgs/Image 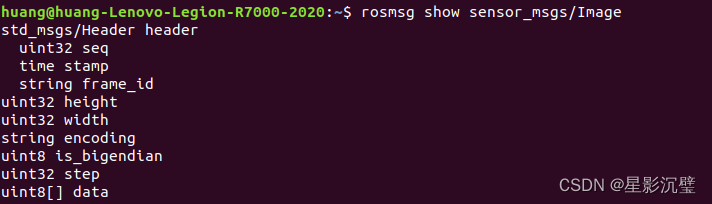
Header: 消息头,包含消息序号,时间戳和绑定坐标系;
height: 图像的纵向分辨率;
width:图像的横向分辨率;
encoding:图像的编码格式,包含RGB、YUV等格式
is_bigendian: 图像数据的大小端存储模式;
step:一行图像数据的字节数量,作为数据的步长参数;
data:存储图像数据的数组,大小为step*height个字节
查看压缩图像信息:
rosmsg show sensor_msgs/CompressedImage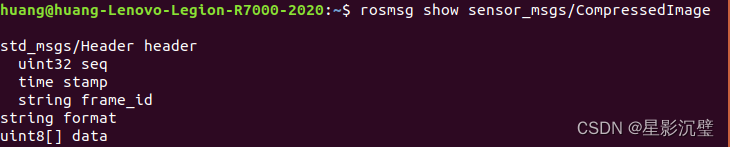
format: 图像的压缩编码格式(JEPG、PNG、BMP)
data: 存储图像数据数组
2.摄像头标定
可以通过ls/dev/video*来查看电脑的设备号来选择外接或笔记本摄像头
下载相机标定包:
sudo apt-get install ros-melodic-camera-calibration //ROS版本为melodic
模板:
sudo apt-get install ros-ros版本-camera-calibration
准备标定靶:
网上下载一个就行了,建议是下载完后打印出来,但如果你跟我一样懒,那你也可以掏出你的平板保存到图库中。
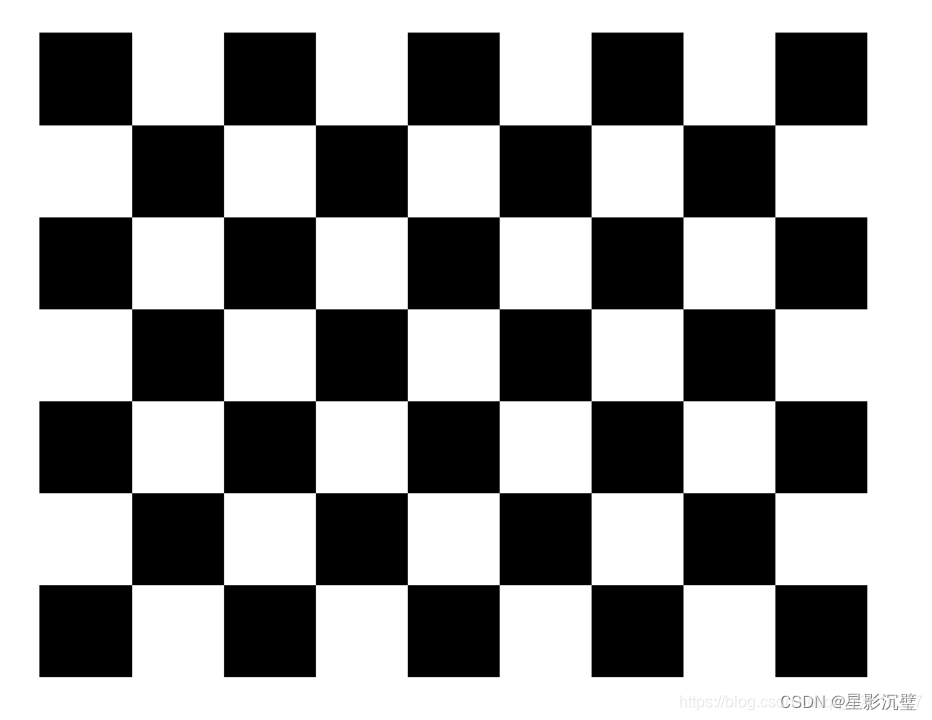
搞到标定靶了,我们要懂几个参数:
1.标定靶的size,上图就是一个8x6的标定靶,我们数行列的交点数就行,后面标定的时候我们需 要设置标定靶的size.
2.格子大小square,需要打印出来后进行测量,也就是每个小正方形格子的长宽,单位是米
开始标定:
先启动摄像头:
roslaunch usb_cam usb_cam-test.launch 
启动标定程序:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam
这里的size和square就是我们上面说的标定靶的参数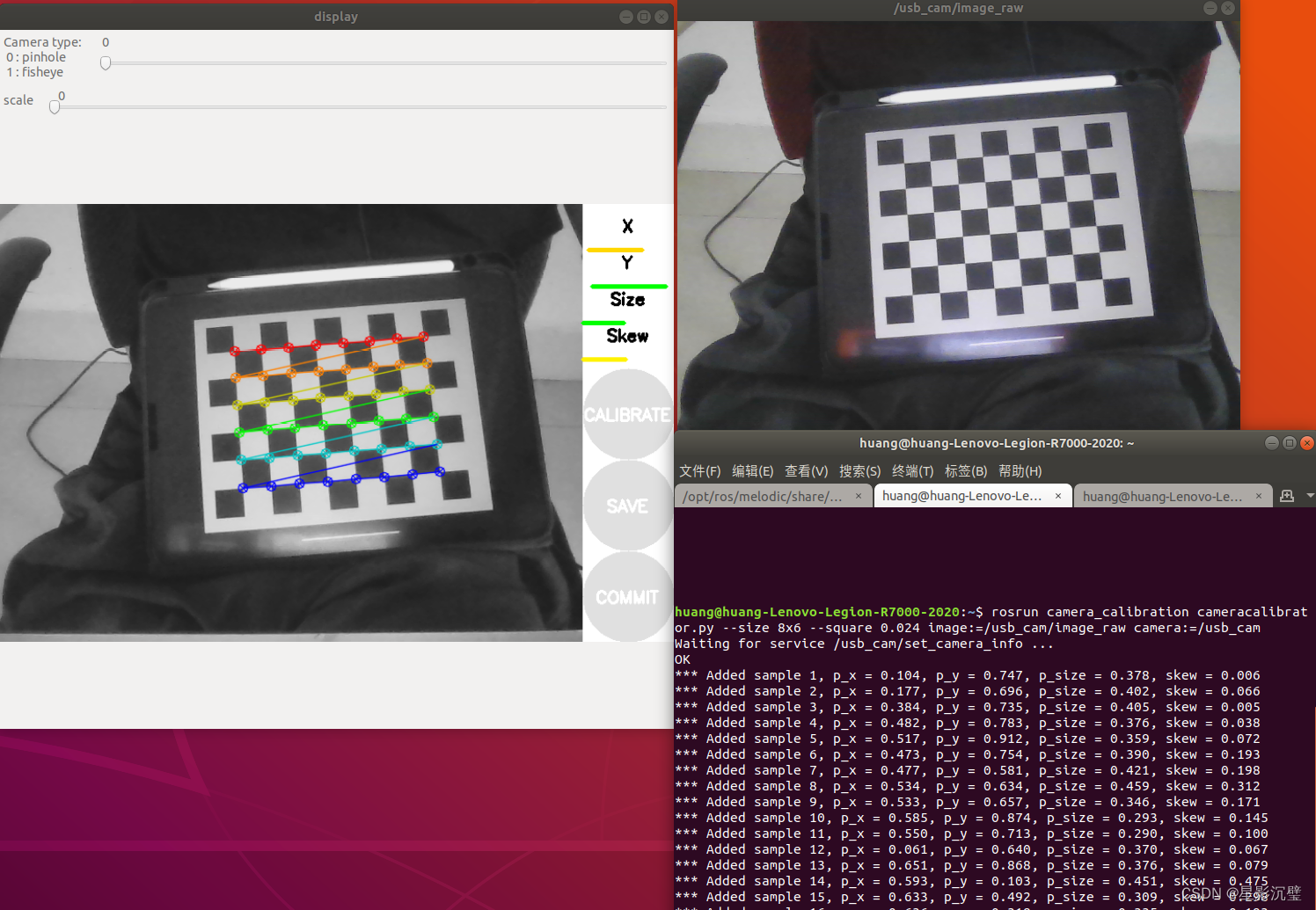
X:标定靶在摄像头视野中左右移动
Y:标定靶在摄像头视野中上下移动
Size:标定靶在摄像头视野中前后移动
Skew:标定靶在摄像头视野中转动(X为转动轴,之前因为自己的理解错误沿着Size轴转了半天)
打开标定程序后,开始调整标定靶的位置尽可能让标定靶在摄像头视野各个位置都出现过,当四个参数都显示绿色后,按键CALIBRATE变成绿色(有时候没标定完也会变绿色,但最好标定完再进行下一步),点击CALIBRATE按键(可能会卡一下),然后SAVE按键也会变成绿色,点击它,这时他就会保存我们的数据了。保存的路径:
/tmp/calibrationdata.tar.gz
找到压缩包里面的ost.yaml文件,将他保存到你想要的位置就行,修改ost.yaml文件中的camera_name,将其修改成:
head_camera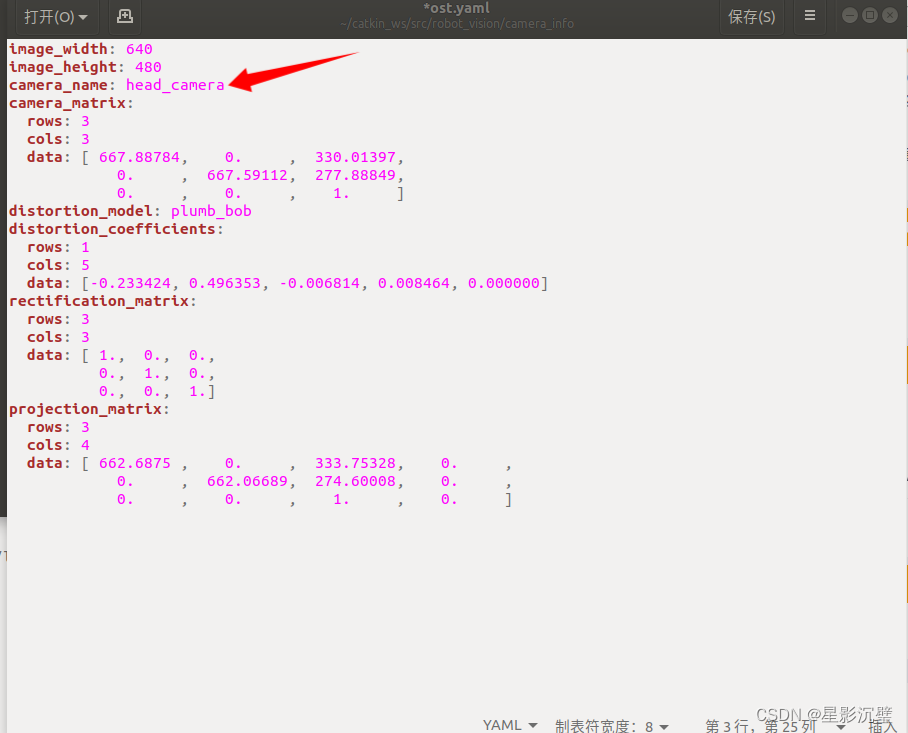
ok到这里校准就完成了
(文章中可能会有瑕疵,欢迎大家指正)















 1911
1911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









