







 本文介绍了视觉里程计(VO)的基本概念、假设条件、单目里程计及其与SLAM的区别。通过特征匹配和图像对应来估计相机位姿,减少漂移。讨论了关键帧选择、优化方法以及回环检测在减小累积误差中的作用。同时,列举了一些开源实现和数据集,为视觉导航提供参考。
本文介绍了视觉里程计(VO)的基本概念、假设条件、单目里程计及其与SLAM的区别。通过特征匹配和图像对应来估计相机位姿,减少漂移。讨论了关键帧选择、优化方法以及回环检测在减小累积误差中的作用。同时,列举了一些开源实现和数据集,为视觉导航提供参考。
无人机很快会在灾难救援,工业检测环境保护方面祈祷重要作用。这样的应用中获取GPS信息是困难的。因此精确的全自动UAV备选的导航定位系统。使用惯导系统的缺点是累积误差,GPS在受限于使用环境。为了减低重量和功率消耗,视觉导航方法的优点一是不易被干扰,另外是大部分无人机已经配备了相机,视觉系统协同IMU(Inertial Measurement Unit)的方案被广泛采用。本文主要关于VO里程计简介。
定义
选择使用这个词因为它和轮式里程计类似,通过通过对轮子转动圈数积分,增量式估计机器的运动。VO由运动引起的机载相机捕获图像的变化增量式地估计机器的位姿。
assumptions
- Sufficient illumination in the environment
- Dominance of static scene over moving objects
- Enough texture to allow apparent motion to be extracted
- Sufficient scene overlap between consecutive frames
单目里程计
和双目例程计最大的区别就是尺度未知,这是因为3D结构必须从2D数据中获取,因此前两个相机位姿之间的距离设为1。 新的图像到来之后,相对尺度和相对于前两帧图像的相机位姿使用3D结构或者三焦张量trifocal tensor获取。
有三类方法,分别是feature-based methods, appearance-based methods, and hybrid methods。Feature-based methods 基于显著的可重复的特征,并在各帧图像中跟踪这些特征。appearance-based methods使用每个像素的秘籍信息或者图像的子区域进行匹配。hybrid method混合前两种方法。
减小漂移
因为VO通过增量式的计算相机的路径,每个新的帧间运动引入的误差随着时间累积。在真是的路径上会产生一个漂移。对于一些应用中,保持漂移尽量小至关重要,可以对局部几个位姿进行优化,叫sliding window bundle adjustment or windowed bundle adjustment。
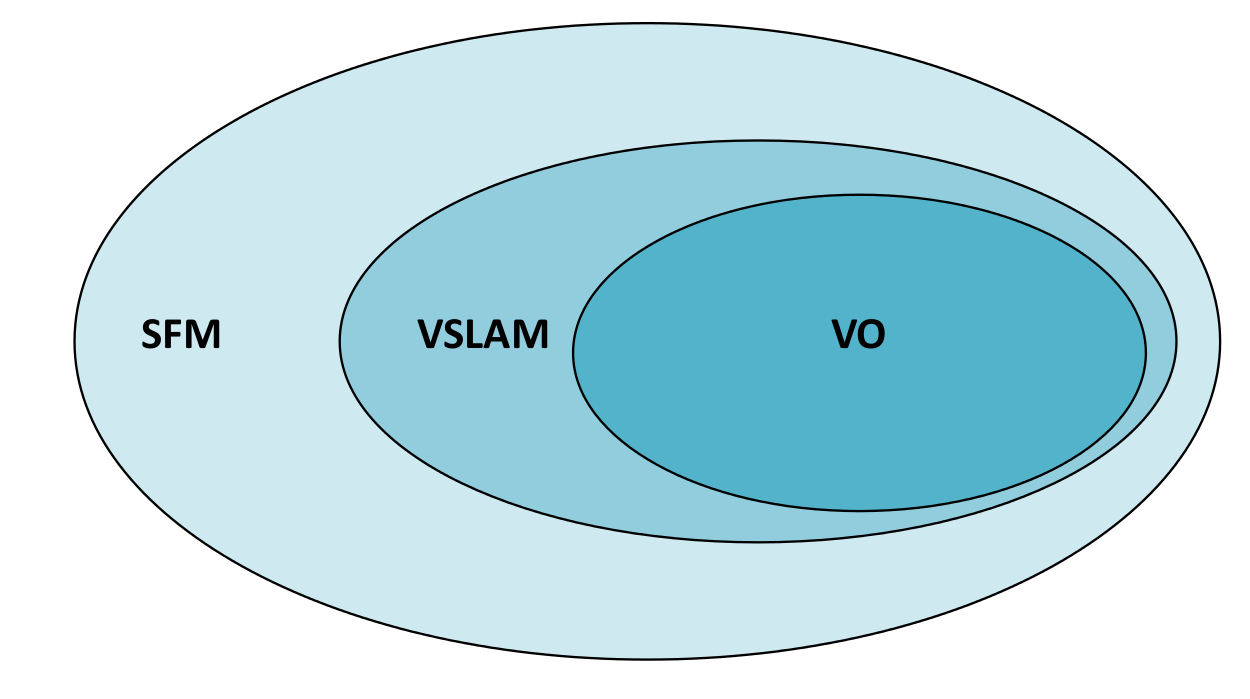
VO is only concerned with the local consistency of the trajectory, whereas SLAM with the global consistency.
vo vs v-SLAM
| item | VO | v-SLAM |
|---|---|---|
| goal | a global, consistent estimate of the robot path | local consistency of the trajectory recovering t pose only over the last n poses |
| map | a map of the environment | local map |
| previously visited area | loop closure | - |
| Optimization | global | local/window |
| trade off | consistency | performance |
formulation
相邻两张图像对应的相机的位置之间的关系为一个刚体变换,如下表示
Tk,k−1=[Rk,k−10tk,k−11]
其中 Rk,k−1∈SO(3) 为旋转矩阵, tk,k−1∈R3 为平移向量,集合 T1:n={
T1:0,...
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3730
3730

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









