







主要步骤
1. 为什么是这样的步骤,为什么只要这几个步骤,为什么是这样的顺序?
2. 这样做的目的是什么?
步骤1.1
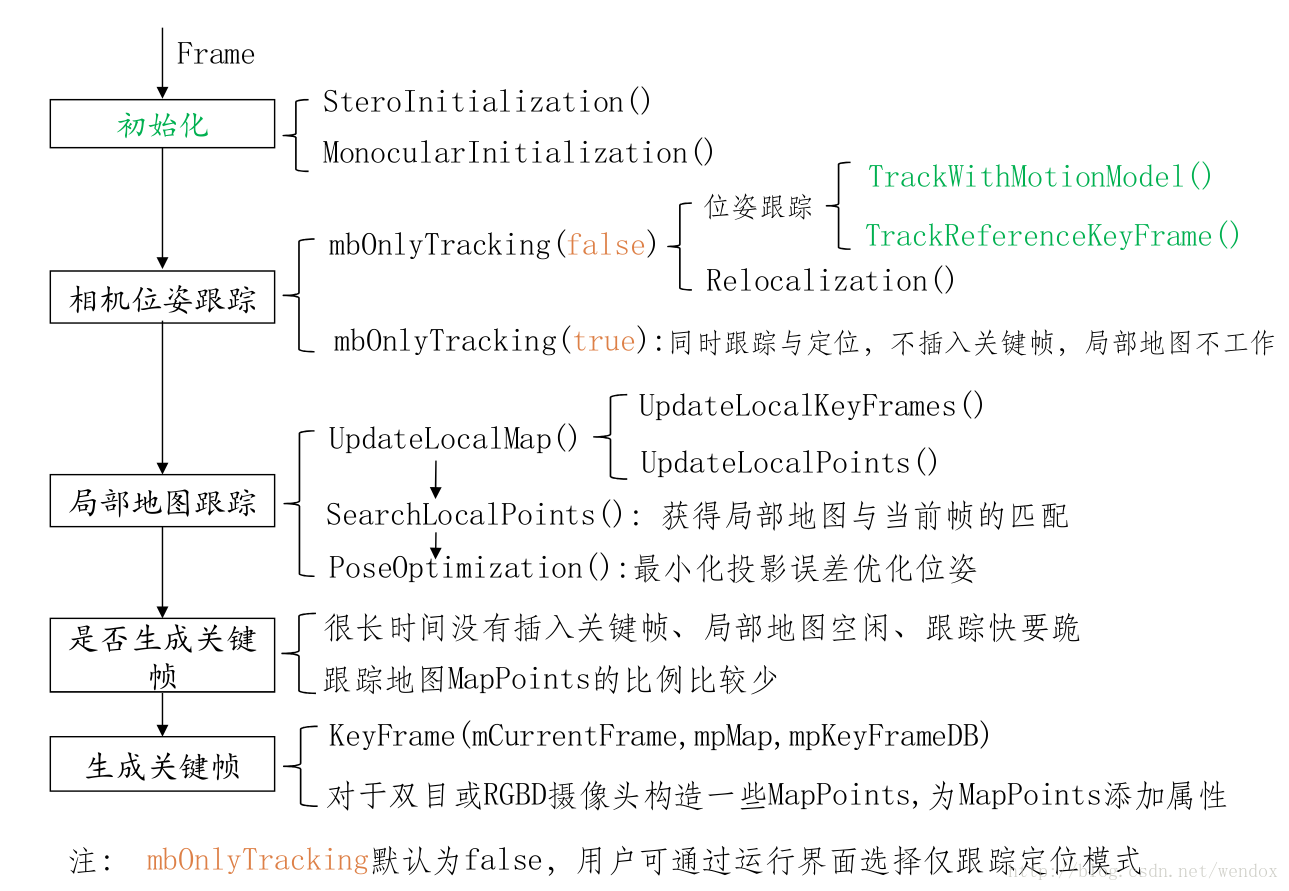
ORB的跟踪器使用一个运动模型,在每次完成位姿计算之后会跟新这个运动模型,根据匀速度模型进行对上一帧的MapPoints进行跟踪,根据上一帧特征点对应的3D点投影的位置缩小特征点匹配范围。这里意思是说我们假设相机是匀速运动的,然后根据上一帧的位姿,我么预测到这一帧对应的位姿,然后使用这个位姿计算路标点在当前帧的投影,这样我们对于特征点的大致范围就知道,这样会大大减小计算量。 在文章中写道如果找不多足够的点,那么会设定一个更宽的范围进行寻找。在使用PnP计算完位姿之后,然后可以剔除那些Outliers。如果恒速模型是空的或者刚完成重定位,这时候选择上一帧的位姿作为当前帧的初始位置,通过BOW的方式在参考帧中找到当前特征点的匹配点,方法仍然PnP。为一个不同点就是匹配的对象不同。
在ORB在跟踪的时候中存在两种模式一种是VO,这种模式下建图是同时进行的,另外一个模式是只跟踪,那么这种状态下建图就停止了。另种状态下的内容差不多,主要是只跟踪状态下位姿的来源有两个一个是来自运动模型的,一个是来自重定位的,如果重定位成功了那么我们就使用重定位的我位姿,如果不
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5043
5043











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









