







 本文介绍了OpenDRIVE中惯性坐标系、参考线坐标系和局部坐标系的定义、相互关系及其在自动驾驶和仿真的应用。重点阐述了各坐标系的轴向、旋转角度以及在地理坐标参考中的定位方式。
本文介绍了OpenDRIVE中惯性坐标系、参考线坐标系和局部坐标系的定义、相互关系及其在自动驾驶和仿真的应用。重点阐述了各坐标系的轴向、旋转角度以及在地理坐标参考中的定位方式。
1 opendrive坐标系概况
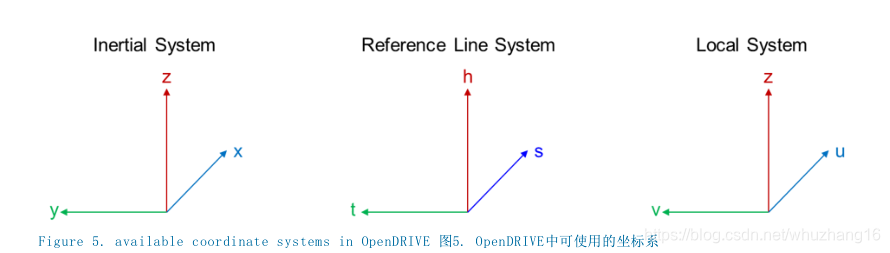
OpenDRIVE使用三种类型的坐标系,如下图所示:
- 惯性x/y/z轴坐标系
- 参考线s/t/h轴坐标系
- 局部u/v/z轴坐标系
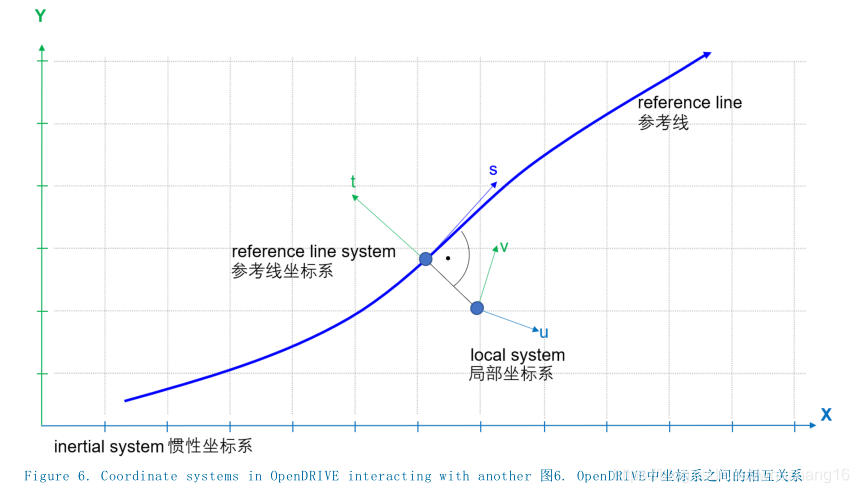
若无另外说明,对局部坐标系的查找与定位将相对于参考线坐标系来进行。对参考线坐标系位置与方向的设定则相对于惯性坐标系来开展,具体方法为对原点、原点的航向角/偏航角、横摆角/翻滚角和俯仰角的旋转角度及它们之间的关系进行详细说明。
2 惯性坐标系(Inertial coordinate systems)
根据ISO 8855惯性坐标系是右手坐标系,其轴的指向方向如下(见图7):
- x轴 ⇒ 右方
- y轴 ⇒ 上方
- z轴 ⇒ 指向绘图平面外
以下惯例适用于地理参考:
- x轴 ⇒ 东边
- y轴 ⇒ 北边
- z轴 ⇒ 上方
通过依次设置航向角/偏航角(heading)、俯仰角(pitch)和横摆角/翻滚角(roll),元素(如物体、标志等)可被置于惯性坐标系中:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









